Изобретение относится к горной промышленности и предназначено для автоматического или дистанционного управления угледобывающим агрегатом с базой и секциями крепи.
Цель изобретения - повышение надежности работы крепи за счет улучшения условий поддержания кровли и соответственно повышение эффективности ведения горных работ.
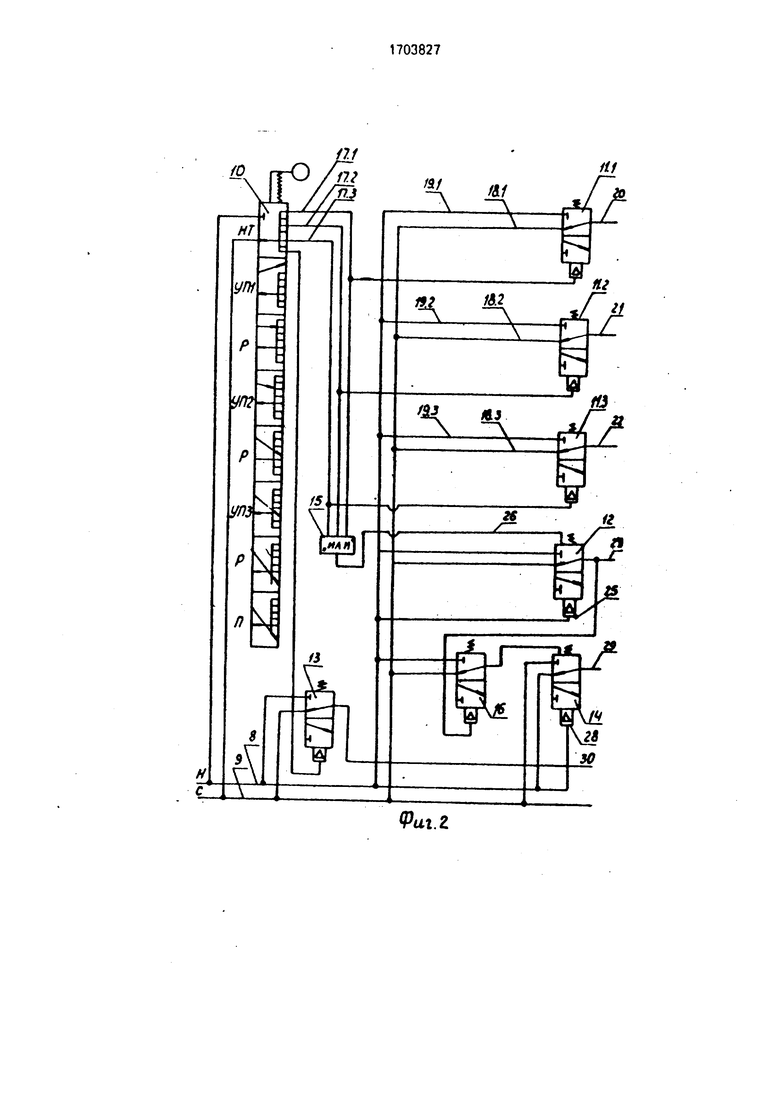
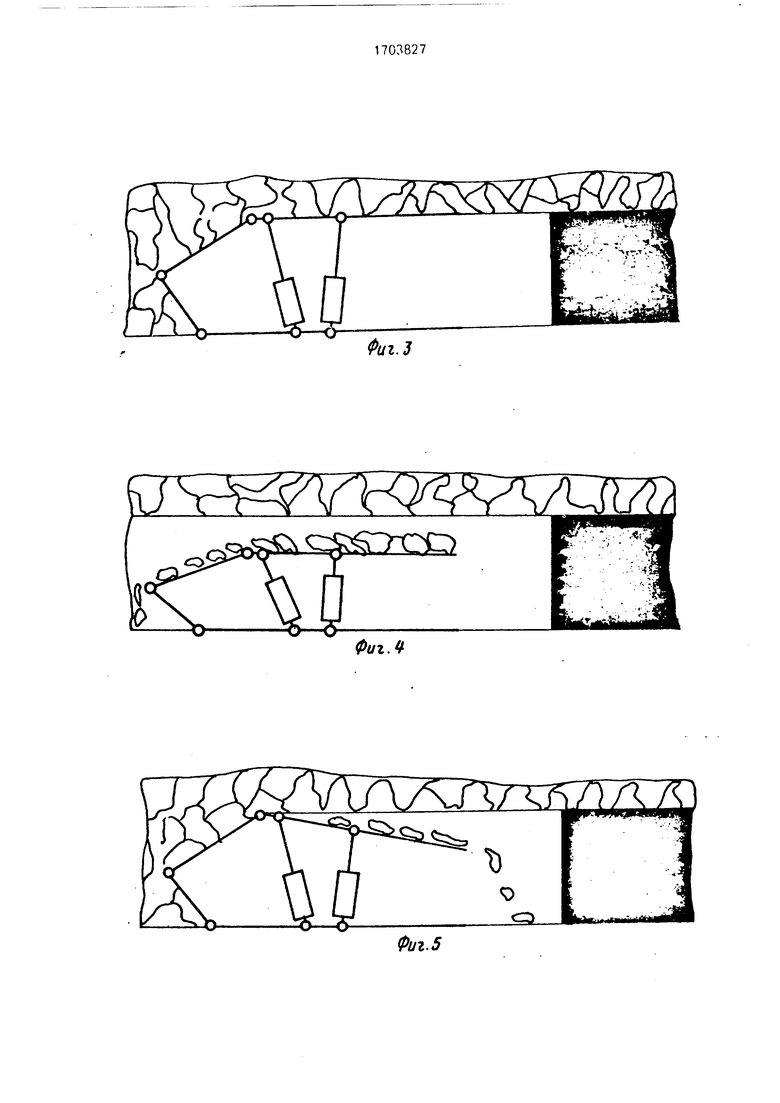
На фиг. 1 представлена структурная схема предлагаемой гидравлической системы управления; на фиг. 2 - принципиальная гидравлическая схема пульта управления системы: на фиг. 3-6 - возможные варианты установки гидростоек в забое (а именно на фиг. 3 показан полный распор секций крепи; на фиг. 4 - перекрытие опущено , на фиг. 5 - распор второго ряда стоек; на фиг. 6 - распор первого ряда стоек).
Гидравлическая система дистанционного управления угледобывающим агрегатом с фронтально-передвигаемой базой (фиг. 1) 1, секциями 2 (2.1, 2.2, 2.3. .... 2п) крепи, включающими двухполостные гидростойки 3 первого ряда и гидростойки 4 второго ряда, а также гидродомкраты.5 передвижки секций 2 крепи и базы 1, содержит насосную станцию 6, пульт 7 управления, соединенный с насосной станцией 6 гидролиниями напора 8 и слива 9.
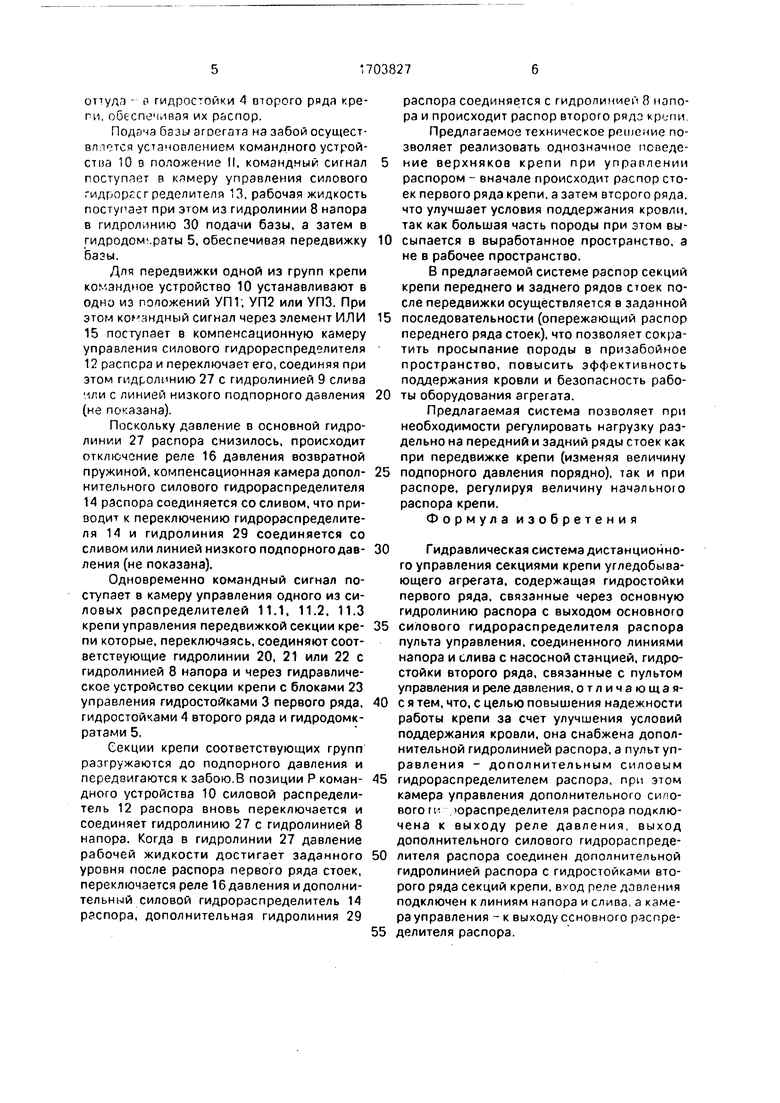
Пульт 7 управления (фиг. 2) содержит командное устройство 10, силовые гидро- распределители 11.1,11.2,11.3 секций крепи, основной силовой гидрораспределитель
12 распора и силовой гидрораспределитель
13 подачи базы, дополнительный гидрораспределитель 14 распора, логический элемент ИЛИ 15, а также реле 16 давления.
Камеры управления силовых гидрораспределителей 11 передвижки секций крепи соединены гидрол иями 17 с командным устройством, одни входы данных гидрораспределителей сообщены гидролиниями 18с линией 9 слива, другие входы этих гидрораспределителей гидролиниями 19 сообщены с линией 8 напора, а их выходы гидролиниями 20-22 соединены с гидростойками 3 и 4 и гидроцилиндрами 5 через блоки 23 управления секциями крепи (фиг. 1), к которым подключены блоки 24 для местного управления.
Основной силовой гидрораспределитель 12 распора имеет две камеры управления, одна из которых 25 соединена с гидролинией 8 напора другая через логический элемент ИЛИ 15 линией 26 с командным устройством 10, входы этого гидрораспределителя 12 сообщены с гидролиниями напора 8 и слива 9, а выход основной гидролинией 27 распора соединен с
гидростойками 3 крепи первого ряда через
блоки 23 всех секций 2 (2.1,2.2, ...,2п) крепи.
Дополнительный силовой гидрораспределитель 14 распора также имеет две камеры управления, одна из которых 28 соединена с гидролинией 8 напора, другая камера управления подключена к выходу реле 16 давления.
0 Камера управления реле 16 давления подключена к выходу основного гидравлического распределителя 12 распора. Входы реле 16 давления и дополнительного силового гидрораспределителя 14 распора сооб5 щены с гидролиниями напора 8 и слива 9, а выход дополнительного силового гидраг.ли- ческого распределителя 14 распора соединен дополнительной гидролинией 29 распора через блоки 23 с гидростойками 4
0 второго ряда секций крепи.
Силовой гидрораспределитель 13 подачи базы соединен с гидролиниями напора 8 и слива 9. а его камера управления с командным устройством 10. Входы последне5 го также соединены с гидролиниями напора и слива.
Выход силового гидрораспределителя 13 гидролинией подачи базы 30 соединен с гидродомкратами 5 посредством блоков 23
0 всех секций крепи.
На фиг. 2 и 4 в командном устройстве 10 обозначены позиции управления передвижной крепи: группа 1-УП1. группа И-УП2, груп5 па 1И-УПЗ. распора Р, подачи базы - П. Нейтральное положение - НТ.
Система работает следующим образом. В исходном положении командное устройство 10 установлено в позиции НТ, все
0 силовые распределители, кроме силовых распределителей 12 и 14 распора, выключены, гидролинии 20.21.22 и 30 соединены со сливом.
Под давлением рабочей жидкости в ка5 мере 25 управления силовой гидрораспределитель 12 распора включен и рабочая жидкость под давлением поступает в гидролинию 27. оттуда - в гидростойки 3 первого ряда крепи, обеспечивая их распор.
0 С выхода силового гидрораспределителя 12 распора рабочая жидкость под давлением поступает в камеру управления реле 16 давления, которое включается и подает рабочую жидкость в компенсационную ка5 меру управления дополнительного силового гидрораспределителя 14 распора. При этом давления в камерах управления уравновесятся и дополнительный силовой гидрораспределитель 14 распора переключается возвратной пружиной и рабочая жидкость под давлением поступает в гидролинию 29,
оттуда - 0 гидростойки 4 второго ряда крепи, обеспечивая их распор.
Подача базы агоегата на забой осуществляется установлением командного устрой- стиа 10 в положение II, командный сигнал поступает в камеру управления силового гидроргсгределителя 13, рабочая жидкость поступает при этом из гидролинии 8 напора в гидролинию 30 подачи базы, а затем в гидродомг.раты 5. обеспечивая передвижку базы.
Для передвижки одной из групп крепи командное устройство 10 устанавливают в одно из положений УП1; УП2 или УПЗ. При этом командный сигнал через элемент ИЛИ 15 поступает в компенсационную камеру управления силового гидрораспределителя 12 распора и переключает его, соединяя при этом гидролинию 27 с гидролинией 9 слива или с линией низкого подпорного давления (не показана).
Поскольку давление в основной гидролинии 27 распора снизилось, происходит отключение реле 16 давления возвратной пружиной, компенсационная камера дополнительного силового гидрораспределителя 14 распора соединяется со сливом, что приводит к переключению гидрораспределителя 14 и гидролиния 29 соединяется со сливом или линией низкого подпорного давления (не показана).
Одновременно командный сигнал поступает в камеру управления одного из силовых распределителей 11.1, 11.2. 11.3 крепи управления передвижкой секции крепи которые, переключаясь, соединяют соответствующие гидролинии 20, 21 или 22 с гидролинией 8 напора и через гидравлическое устройство секции крепи с блоками 23 управления гидростойками 3 первого ряда, гидростойками 4 второго ряда и гидродомкратами 5.
Секции крепи соответствующих групп разгружаются до подпорного давления и передвигаются к забою.В позиции Р командного устройства 10 силовой распределитель 12 распора вновь переключается и соединяет гидролинию 27 с гидролинией 8 напора. Когда в гидролинии 27 давление рабочей жидкости достигает заданного уровня после распора первого ряда стоек, переключается реле 16 давления и дополнительный силовой гидрорэспределитель 14 распора, дополнительная гидролиния 29
распора соединяется с гидролинией 8 нопо- ра и происходит распор второго ряда крепи. Предлагаемое техническое решение позволяет реализовать однозначное псведение верхняков крепи при управлении распором - вначале происходит распор стоек первого ряда крепи,а затем второго ряда. что улучшает условия поддержания кровли, так как большая часть породы при этом высыпается в выработанное пространство, а не в рабочее пространство,
В предлагаемой системе распор секций крепи переднего и заднего рядов стоек после передвижки осуществляется в заданной
последовательности (опережающий распор переднего ряда стоек), что позволяет сократить просыпание породы в призабойное пространство, повысить эффективность поддержания кровли и безопасность работы оборудования агрегата.
Предлагаемая система позволяет при необходимости регулировать нагрузку раздельно на передний и задний ряды стоек как при передвижке крепи (изменяя величину
подпорного давления порядно), так и при распоре, регулируя величину начального распора крепи.
Формула изобретения
Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата, содержащая гидростойки первого ряда, связанные через основную гидролинию распора с выходом основного
силового гидрораспределителя распора пульта управления, соединенного линиями напора и слива с насосной станцией, гидростойки второго ряда, связанные с пультом управления и реле давления, отличающаяс я тем, что, с целью повышения надежности работы крепи за счет улучшения условий поддержания кровли, она снабжена дополнительной гидролиниеи распора, а пульт управления - дополнительным силовым
гидрораспределителем распора, при этом камера управления дополнительного силового г и юраспределителя распора подключена к выходу реле давления, выход дополнительного силового гидрораспределителя распора соединен дополнительной гидролинией распора с гидростойками второго ряда секций крепи, вход реле давления подключен к линиям напора и слива, а камера управления - к выходу основного распределителя распора.
Ш
HI
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| Система гидравлического дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1528925A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Гидравлическая система | 1990 |
|
SU1796771A1 |
| Способ поддержания очистного забоя и секция механизированной крепи для его осуществления | 1987 |
|
SU1518534A1 |
| Гидравлическая система группового управления секциями шахтной крепи | 1978 |
|
SU752037A1 |
| Система управления шахтной гидрофицированной крепью | 1979 |
|
SU857498A1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
Изобретение относится к горной промети. Цель изобретения - повышение надежности работы крепи за счет улучшения условий поддержания кровли. Для этого гидростойки (ГС) 3 первого ряда секций 2 2.1 I 2.2 / П / крепи связаны через основную гидролинию (ГЛ) 27 распора с выходом основного силового гидрораспределителя распора (ГРР) пульта 7 управления. При этом основной ГРР соединен ГЛ напора 8 и слива 9 с насосной станцией 6. С пультом 7 управления и реле давления связаны ГС 4 второго ряда. К выходу реле давления подключена камера управления дополнительного силового ГРР. Выход основного ГРР соединен дополнительной ГЛ 29 распора с ГС 4. Вход реле давления подключен к ГЛ 8 и 9. а его камера управления подключена к выходу основного ГРР. При управлении распором вначале происходит распор ГС 3. а затем ГС 4. Это улучшает условия поддержания кровли и позволяет сократить просыпание породив призабрйное пространство. Система позволяет также регулировать нагрузку раздельно на ГС 3 и 4 как при передвижке крепи, так и при распоре, регулируя величину начального распора крепи. 6 ил. /2п-2 2п-1 I }3п (Л С Фиг.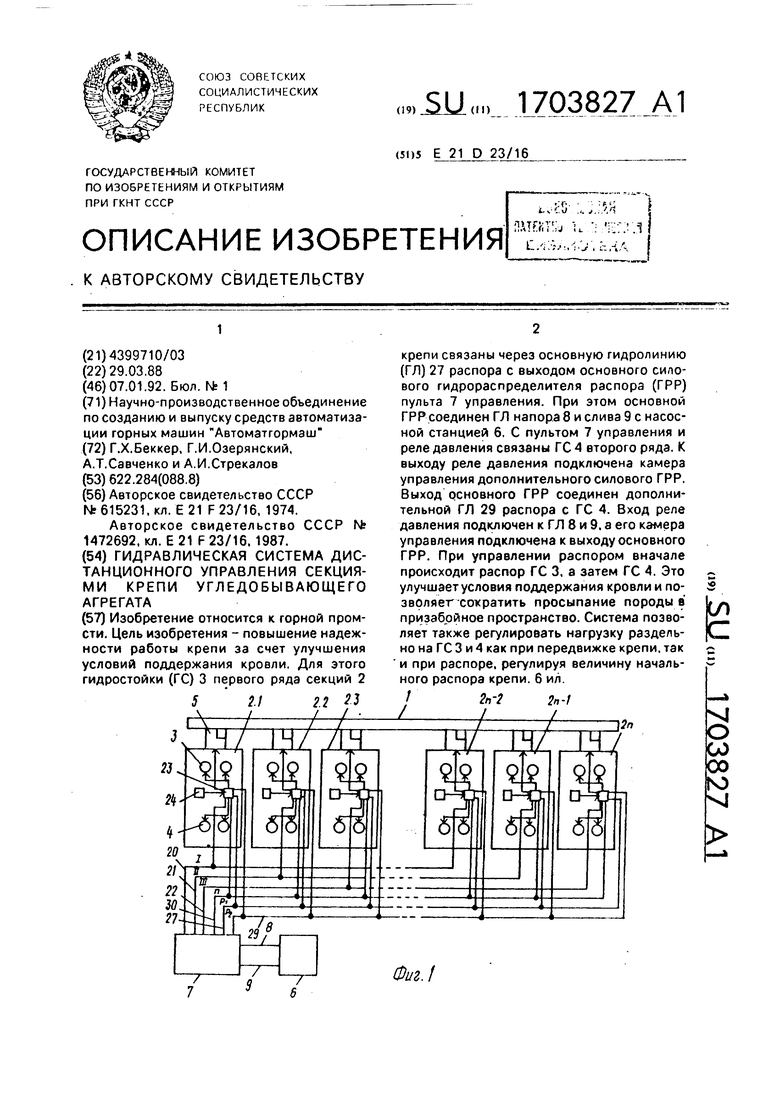
Фиг.г
OVWFPy PV
Фиг.З
Фиг Л
Фиг. 5
fa. 6
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
