315
ным устройством (КУ) 9, сообщенным гидролиниен 8 слива с одним, а гидролинией 7 напора с другим его входами. Выходами через распределители (Р) 10.1, 10.2 и 10.3 передвижки секций крепи, Р 12 подачи базы и Р 11 распора КУ 9 сообщено с гидростойками и гидродомкратами. Входы двух- позиционного гидроэлемента (ГЭ) 13 с ручным приводом, возвратной пружиной и камерой управления сообщены между собой посредством дросселирующего элемента 19. Выход ГЭ 13 сооб
д(- пояп.чяется давление, по г идроли- нии 16 поступающее в камрру управления и блокирующее ГЭ 13 во включенном состоянии. Одновременно по гидролинии 28 давление поступает в камеру управления 27 Р 11. Жидкость под давлением поступает по гидролинии 31 в гидростойки, обеспечивая их распор. При случайном отключении насосной станции давление в гидролинии 16 снизится из-за ее соединения через элемент 19 со сливом. Пружиной ГЭ 13 переводится в исходное 
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1989 |
|
SU1652602A2 |
| Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата | 1988 |
|
SU1703827A1 |
| Устройство автоматического управления секциями механизированной крепи | 1983 |
|
SU1257200A1 |
| Гидравлическая система | 1990 |
|
SU1796771A1 |
| Гидравлическая система группового управления секциями шахтной крепи | 1978 |
|
SU752037A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Способ поддержания очистного забоя и секция механизированной крепи для его осуществления | 1987 |
|
SU1518534A1 |
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
Изобретение относится к горной промышленности и предназначено для автоматического или дистанционного управления угледобывающими агрегатами с базой и секциями крепи. Цель - повышение безопасности работы агрегата путем исключения аварийных ситуаций при отключении насосной станции и последующем ее включении. Система включает гидролинии напора 7 и слива 8 и пульт управления с командным устройством (КУ) 9, сообщенным гидролинией 8 слива с одним, а гидролинией 7 напора с другим его входами. Выходами через распределители (Р) 10.1, 10.2 и 10.3 передвижки секций крепи, Р 12 подачи базы и Р 11 распора КУ 9 сообщено с гидростойками и гидродомкратами. Входы двухпозиционного гидроэлемента (ГЭ) 13 с ручным приводом, возвратной пружиной и камерой управления сообщены между собой посредством дросселирующего элемента 19. Выход ГЭ 13 сообщен со своей камерой управления, другим входом КУ 9 и с камерой управления Р 11 распора. В исходном положении по гидролинии напора 7 жидкость под давлением поступает к ГЭ 13 и Р 10.1, 10.2, 10.3, 11 и 12. Камеры управления всех силовых Р через КУ 9 и ГЭ 13 соединены со сливом. Для перевода системы в рабочее состояние вручную включают ГЭ 13. На его выходе появляется давление, по гидролинии 16 поступающее в камеру управления и блокирующее ГЭ 13 во включенном состоянии. Одновременно по гидролинии 28 давление поступает в камеру управления 27 Р 11. Жидкость под давлением поступает по гидролинии 31 в гидростойки, обеспечивая их распор. При случайном отключении насосной станции давление в гидролинии 16 снизится из-за ее соединения через элемент 19 со сливом. Пружиной ГЭ 13 переводится в исходное положение, соединяя вход КУ 9 с линией слива. Это положение ГЭ 13 фиксируется его рукояткой. При последующем включении насосной станции ГЭ 13 может быть включен в рабочее положение только вручную воздействием на его рукоятку. В результате этого исключается самопроизвольное включение силовых Р. 3 ил.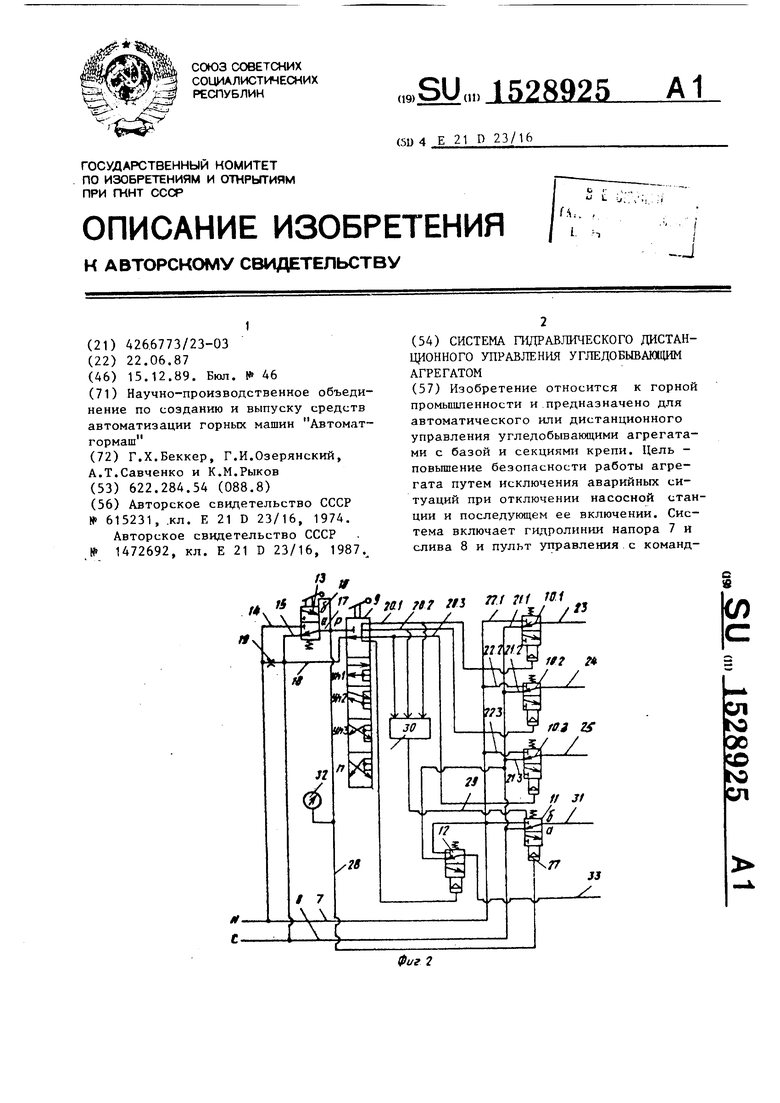
щен со своей камерой управления, дру- j положение, соединяя вход КУ 9 с ли- гим входом КУ 9 и с камерой управле- нией слива. Это положение ГЭ 13 фикния Р 11 распора. В исходном положении по гидролинии напора 7 жидкость под давлением поступает к ГЭ 13 и Р 10.1, 10.2, 10.3, 11 и 12. Камеры уп- равления всех силовых Р через КУ 9 и ГЭ 13 соединены со сливом. Для перевода системы в рабочее состояние вручную включают ГЭ 13. На его выхоИзобретение относится к горной промьшшенности и предназначено для автоматического или дистанционного управления угледобывающими агрегатами с базой и секциями крепи.
Цель изобретения - повышение безопасности работы агрегата путем исключения аварийных ситуаций при отключении насосной станции:и последующем ее включении.
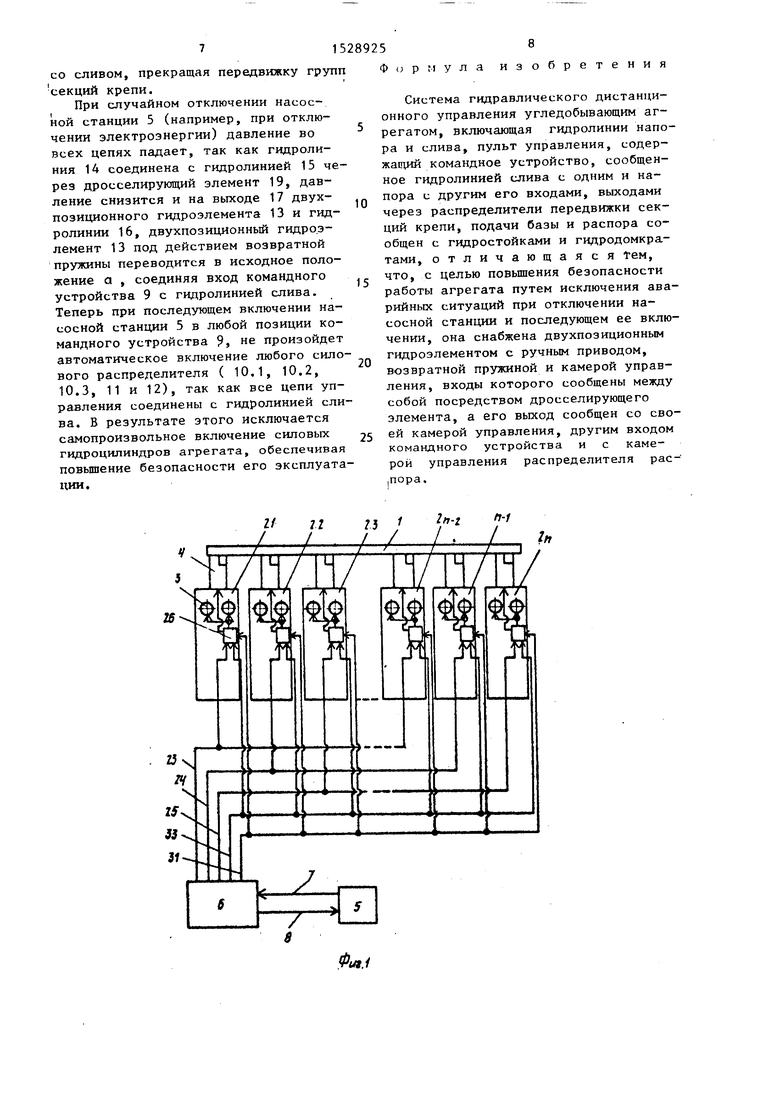
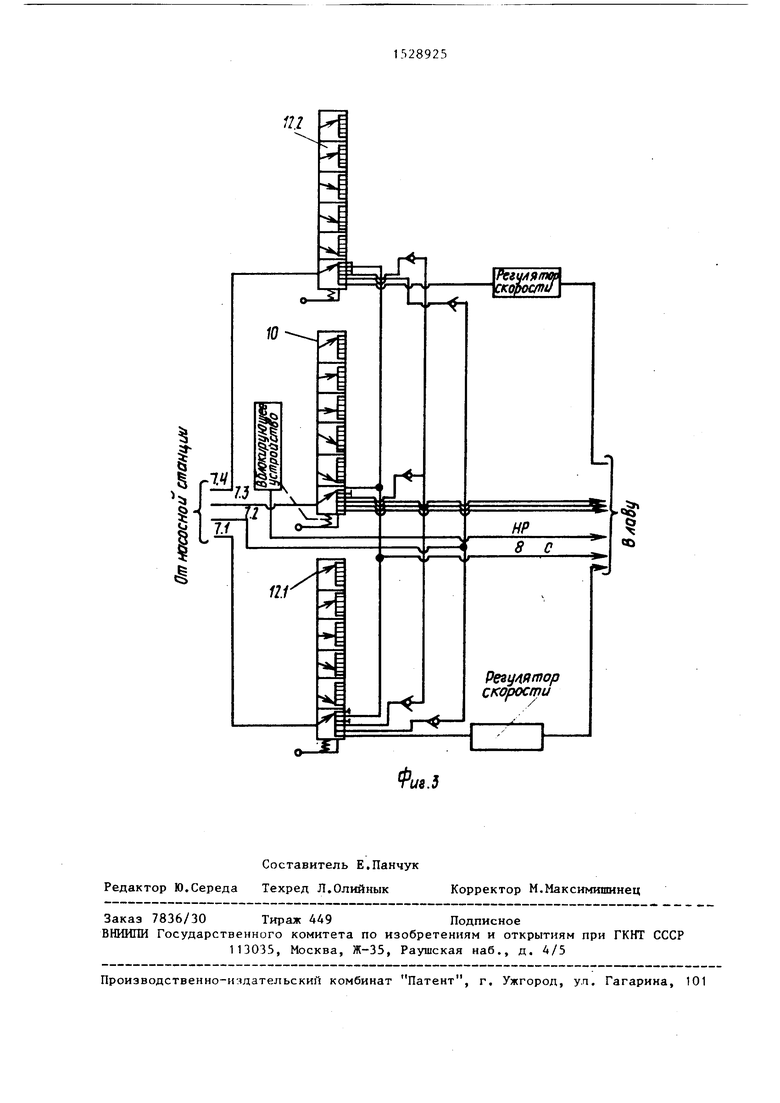
На фиг. 1 изображена структурная схема предлагаемой гидравлической системы управления угледобывающим агрегатом; на фиг. 2 - принципиальная гидравлическая схема пульта управления предлагаемой системы; на фиг. 3 - принципиальная гидравлическая схема пульта управления известной системы.
Гидравлическая система дистанционного управления угледобывающим агрегатом с передвигаемой базой 1, секциями крепи 2.1, 2.2, 2.3 ...2п,образующими три группы при передвижке (например, 1 группа 2.1, 2.4...,
2п - 2; 2 группа 2.2, 2.5, 2п - 1;
3группа 2.3, 2.6, 2п), включающими- двухполостные гидростойки 3 и двух- полостные гидродомкраты 4 передвижки крепи и базы 1, содержит насосную
сируется его рукояткой. При последующем включении насосной станции ГЭ 13 м.б. включен в рабочее положение только вручную воздействием на его рукоятку. В результате этого исключается самопроизвольное включение силовых Р. 3 ил.
0
5
0
станцию 5, пульт 6 управления, соединенный с насосной станцией 5 гидролиниями 7 напора и слива 8.
Пульт 6 управления содержит командное устройство 9, силовые распределители передвижки секций крепи 10.1, 10.2 и 10.3, силовые распределители 11 распора, подачи базы 12, двухпозиционный гидроэлемент 13 с ручным управлением и возвратной пружиной.
Входы двухпозиционного гидроэлемента 13 соединены гидролинией 14 с гидролинией 7 напора и гидролинией 15 с гидролинией 8 слива, а его выход - гидролинией 16 подсоединен к 5 своей камере управления и гидролинией 1 7 к другому входу командного устройства 9, вход которого гидролинией
18связан с гидролинией В слива. Гидролинии 14 и 15 соединены между собой через дросселирующий элемент
19с малым проходным отверстием. Камеры управления силовых распределителей передвижки секций крепи 10.1, 10.2 и 10.3 соединены гидролиниями 20.1, 20.2 и 20.3 с выходами командного устройства 9, одни входы данных распределителей гидролиниями 21.1, 21.2 и 21.3 соединены с гидролинией 8 слива, другие входы этих распреде0
5
лител ей гидролиниямн 22.1, 22.2 и 22.3 соединены с гидролинией 7 напора, а их выходы гидролиниями 23, 24 и 25 соединены с гидродомкратами 4 и гидростойками 3 через устройства 26 управления секциями крепи (фиг. 1
Силовой распределитель 11 распора имеет две камеры управления, одна из которых 27 соединена гидравлической линией 28 с гидролинией 17 (соединяющей двухпозиционный элемент 13 с другим входом командного устройства), другая - линией 29 через логический элемент ИЛИ 30 - с одним из выходов командного устройства 9, входы этого распределителя сообщены с гидролиниями напора 7 и слива 8, а выход гидролинией 31 распора с гидростойками 3 всех секций крепи 2.1, 2.2... 2п через устройства 26.
Для контроля давления в гидролинии 28 может быть установлен манометр 32. Силовой гидрораспределитель 12 соединен с гидролиниями напора 7 и слива 8, его камера управления с одним из выходов командного устройства 9, а выход гидрораспределителя 12 гидролинией подачи базы 33 с гидродомкратами 4 посредством устройства 26 управления всех секций крепи.
На фиг. 2 в командном устройстве 9 обозначены позиции управления распора гидродомкратов крепи Р передвижкой секций крепи группы 1 - Ynl , группы 2 - Yn2, группы 3 - Yn3, подачи базы - п.
Предлагаемая система работает следующим образом.
В исходном положении (насосная станция работает) гидролиния 7 напора находится под давлением, давление поступает к двухпозиционному гидроэлементу 13 и силовым распределителям 10.1, 10.2, 10.3-, 11 и 12, при этом камеры управления всех силовых распределителей через командное устройство 9 (которое должно находиться в позиции Р) и двухпозиционный гидроэлемент 13 (последний находится в положении q, показанном на фиг. 2) соединены to сливом.
Для перевода системы в рабочее состояние вначале вручную включают кратковременно двухпозиционный гидроэлемент 13 ( в положение Б ). На его выходе появляется давление, которое по гидролииии 16 поступает в камеру управления гидроэлемента 13
0
5
0
5
0
5
0
5
0
5
и последний самоблокируется, наличие давления контролируется манометром 32. Одновременно давление по линии 28 поступает в камеру 27 управления силового рапределителя 11.
Под давлением рабочей жидкости в камере 27 управления силовой гидрораспределитель 11 включен (положение а ) и рабочая жидкость под давлением поступает в гидролинию 31, оттуда в гидростойки 3 секций крепи, обеспечивается их распор.
Подача базы агрегата на забой осуществляется включением через командное устройство 9 силового гидрораспределителя 12, рабочая жидкость поступает из гидролинии 7 напора в гидролинию 33 подачи базы, а затем в гидродомкраты 4 агрегата, обеспечивая перемещение базы.
Для передвижки одной из групп секций крепи, командное устройство 9 устанавливают в одно из положений Ynl, Yn2 или Yn3. Командный сигнал через элемент ИЛИ 30 поступает в одну из камер управления силового распределителя 11 и переключает его в положение S, соединяя при этом гидролинию 31 с гидролинией 8 слива или с линией низкого подпорного давления (на схеме не показана). Одновременно командный сигнал поступает в камеру управления одного из силовых распределителей управления передвижкой секции крепи 10.1, 10.2, 10.3, которые, переключаясь, соединяют соответствующие гидролинии 23, 24 или 25 с гидролинией 7 напора и через гидравлическое устройство управления секциями крепи 26 с гидростойками 3 и гидродомкратами 4. Секции крепи соответствующих групп разгружаются и передвигаются к забою.
При установке командного устройства 9 в позицию Р (распор) отключает давление, поступакнцее по гидролинии 29 в камеру управления силового распределителя 11 и он переключается в положение Q под давлением жидкости, подводимой в камеру 27 управления, соединяя гидролинию 7 напора с гидролинией 31. Жи;1кость под давлением поступает в стойки 3, при этом происходит распор крепи, а силовые распределители 10.1 (или 10.2, 10.3) возвращаются в исходное положение и соединяют гидролинии 23 (или 24 и 25)
Z/
/
71
25
п Г / / / . /
Л
o-fi
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| - | |||
