а
Изобретение относится к горной промышленности и предназначено для дистанционного управления угледобывающим агрегатом с базой и секциями крепи.
Цель изобретения - повышение надежности работы агрегата.
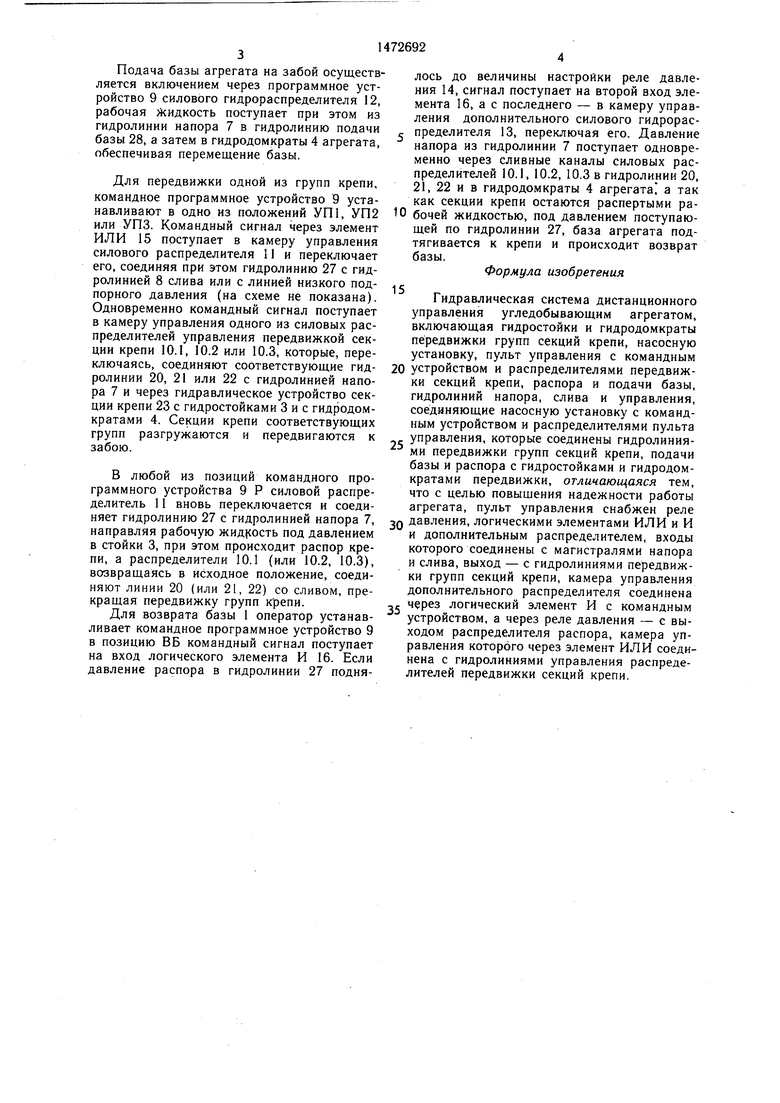
На фиг. 1 изображена структурная схема предлагаемой гидравлической системы управления угледобывающим агрегатом; на фиг. 2 - принципиальная гидравлическая схема пульта управления предлагаемой системы.
Гидравлическая система дистанционного управления угледобывающим агрегатом с фронтально-передвигаемой базой 1, секциями крепи 2.1, 2.2, 2.3...2.л, образующими три группы при передвижке (например I группа - 2.1, 2.4, 2.«-2, U группа - 2.2, 2.5, 2.rt-1; HI группа - 2.3, 2.6, 2.п), включающими двухполостные гидростойки 3 и двухполостные гидродомкраты 4 передвижки крепи и базы 1, содержит насосную станцию 5, пульт управления 6, соединенный с насосной станцией 5 гидролиниями напора 7 и слива 8.
Пульт управления 6 (фиг. 2) содержит командное программное устройство 9, силовые распределители передвижки секций крепи 10.1, 10.2, 10.3, силовые распределители распора 11, подачи базы 12, а также дополнительный силовой распределитель 13, реле давления 14, логические гидроэлементы ИЛИ 15 и И 16.
Камеры управления силовых распределителей передвижки секций крепи 10.1, 10.2, 10.3 соединены гидролиниями 17.1, 17.2, 17.3 с командным программным устройством 9; одни входы данных распределителей сообщены гидролиниями 18.1, 18.2, 18.3 с выходом распределителя 13, другие входы этих распределителей гидролиниями 19.1, 19.2, 19.3 с гидролинией напора 7, а их выходы гиД- ролиниями 20, 21, 22 соединены с гидродомкратами 4 и гидростойками 3 через устройства 23 управления секциями крепи (фиг. 1), к которым подключены для местного управления блоки 24.
Силовой гидрораспределитель распора 11 5 имеет две камеры управления, одна из которых - камера 25 - соединена с гидролинией напора 7, другая - через логический элемент ИЛИ 15 линией 26 с командным программным устройством 9, входы этого „ распределителя сообщены с гидролиниями напора 7 и слива 8, а выход гидролинией распора 27 с гидростойками 3 через устройства 23 всех секций крепи 2.1, 2.2...2.п.
Силовой гидрораспределитель 12 соединен с гидролиниями напора 7 и слива 8, его камера управления - с программным устройством 9, а выход гидролинией 28 подачи базы - с гидродомкратами 4 посредством устройства 23 всех секций крепи 2.1, 2.2... 2.П.
Дополнительный силовой гидрораспреде- 0 литель 13 соединен с гидролиниями напора 7 и слива 8, его выход соединен со сливными каналами 18.1, 18.2, 18.3 силовых гидрораспределителей передвижки секций крепи 10.1, 10.2, 10.3, а камера его управления через 5 элемент И 16 соединена с командным программным устройством 9 и через реле давления 14 - с гидролинией 27 распора.
На фиг. 2 в командном распределителе обозначены позиции управления передвижкой крепи группы I-VII 1, группы II-VII 2, Q группы, III-VII3, распора Р, возврата базы ВБ, подача базы ПБ.
Система работает следующим образом
В исходном положении все силовые распределители, кроме распределителя 11, выключены, гидролинии 20, 21, 22, 28 соедине- 5 ны со сливом. Под давлением рабочей жидкости в камере управления 25 силовой гидрораспределитель 11 включен, и рабочая жидкость под давлением поступает в гидролинию 27, оттуда в гидростойки 3 крепи, обеспечивая их
0
распор.
Подача базы агрегата на забой осуществляется включением через программное устройство 9 силового гндрораспределителя 12, рабочая жидкость поступает при этом из гидролинии напора 7 в гидролинию подачи базы 28, а затем в гидродомкраты 4 агрегата, обеспечивая перемещение базы.
Для передвижки одной из групп крепи, командное программное устройство 9 уста
лось до величины настройки реле давле ния 14, сигнал поступает на второй вход эле мента 16, а с последнего - в камеру управ ления дополнительного силового гидрорас пределителя 13, переключая его. Давлени напора из гидролинии 7 поступает одновре менно через сливные каналы силовых рас пределителей 10.1, 10.2, 10.3 в гидролинии 20 21, 22 и в гидродомкраты 4 агрегата а так как секции крепи остаются распертыми ра
« - - - - - J - -ti.k.«m. . 1ьи«.1111 4X4.1 ciiv/ L/O llCL/1 DIШ ri и и
навливают в одно из положений УП1, УП2 Ю бочей жидкостью, под давлением поступаю
UTTUVIlXИ/Ч114ОиПТ Т1-1ТЛ 1 г ||ГЧп л.#ч.,...,
или УПЗ. Командный сигнал через элемент ИЛИ 15 поступает в камеру управления силового распределителя 11 и переключает его, соединяя при этом гидролинию 27 с гидролинией 8 слива или с линией низкого подпорного давления (на схеме не показана). Одновременно командный сигнал поступает в камеру управления одного из силовых распределителей управления передвижкой секции крепи 10.1, 10.2 или 10.3, которые, переключаясь, соединяют соответствующие гид- роликии 20, 21 или 22 с гидролинией напора 7 и через гидравлическое устройство секции крепи 23 с гидростойками 3 и с гидродомкратами 4. Секции крепи соответствующих групп разгружаются и передвигаются к забою.
В любой из позиций командного программного устройства 9 Р силовой распределитель 11 вновь переключается и соедищей по гидролинии 27, база агрегата под тягивается к крепи и происходит возврат базы.
Формула изобретения
15
Гидравлическая система дистанционного управления угледобывающим агрегатом включающая гидростойки и гидродомкраты передвижки групп секций крепи, насосную установку, пульт управления с командным 20 устройством и распределителями передвижки секций крепи, распора и подачи базы, гидролиний напора, слива и управления, соединяющие насосную установку с командным устройством и распределителями пульта - управления, которые соединены гидролиниями передвижки групп секций крепи, подачи базы и распора с гидростойками и гидродомкратами передвижки, отличающаяся тем, что с целью повышения надежности работы агрегата, пульт управления снабжен реле
.х,.м,ы, jiijJcitJifn,nn7i V-naU/ncrt UCJIC
няет гидролинию 27 с гидролинией напора 7, 30 Давления, логическими элементами ИЛИ и И
НЯГТПЯК.ПЯЯ M UnVAPTt, пп п паапаигиа гtr г....,«
напра вляя рабочую под давлением в стойки 3, при этом происходит распор крепи, а распределители 10.1 (или 10.2, 10.3), возвращаясь в исходное положение, соединяют линии 20 (или 21, 22) со сливом, прекращая передвижку групп к репи.
Для возврата базы 1 оператор устанавливает командное программное устройство 9 в позицию ВБ командный сигнал поступает на вход логического элемента И 16. Если давление распора в гидролинии 27 подняи дополнительным распределителем, входы которого соединены с магистралями напора и слива, выход - с гидролиниями передвижки групп секций крепи, камера управления дополнительного распределителя соединена 25 через логический элемент И с командным устройством, а через реле давления - с выходом распределителя распора, камера управления которого через элемент ИЛИ соединена с гидролиниями управления распределителей передвижки секций крепи.
лось до величины настройки реле давления 14, сигнал поступает на второй вход элемента 16, а с последнего - в камеру управления дополнительного силового гидрорас- пределителя 13, переключая его. Давление напора из гидролинии 7 поступает одновременно через сливные каналы силовых распределителей 10.1, 10.2, 10.3 в гидролинии 20, 21, 22 и в гидродомкраты 4 агрегата а так как секции крепи остаются распертыми раti.k.«m. . 1ьи«.1111 4X4.1 ciiv/ L/O llCL/1 DIШ ri и и
бочей жидкостью, под давлением поступаю
бочей жидкостью, под давлением поступаю
,
щей по гидролинии 27, база агрегата подтягивается к крепи и происходит возврат базы.
Формула изобретения
15
Гидравлическая система дистанционного управления угледобывающим агрегатом, включающая гидростойки и гидродомкраты передвижки групп секций крепи, насосную установку, пульт управления с командным 20 устройством и распределителями передвижки секций крепи, распора и подачи базы, гидролиний напора, слива и управления, соединяющие насосную установку с командным устройством и распределителями пульта - управления, которые соединены гидролиниями передвижки групп секций крепи, подачи базы и распора с гидростойками и гидродомкратами передвижки, отличающаяся тем, что с целью повышения надежности работы агрегата, пульт управления снабжен реле
«.х,.м,ы, jiijJcitJifn,nn7i V-naU/ncrt UCJIC
30 Давления, логическими элементами ИЛИ и И
30 Давления, логическими элементами ИЛИ и И
tr г....,«
и дополнительным распределителем, входы которого соединены с магистралями напора и слива, выход - с гидролиниями передвижки групп секций крепи, камера управления дополнительного распределителя соединена 25 через логический элемент И с командным устройством, а через реле давления - с выходом распределителя распора, камера управления которого через элемент ИЛИ соединена с гидролиниями управления распределителей передвижки секций крепи.
и
I LLZ.I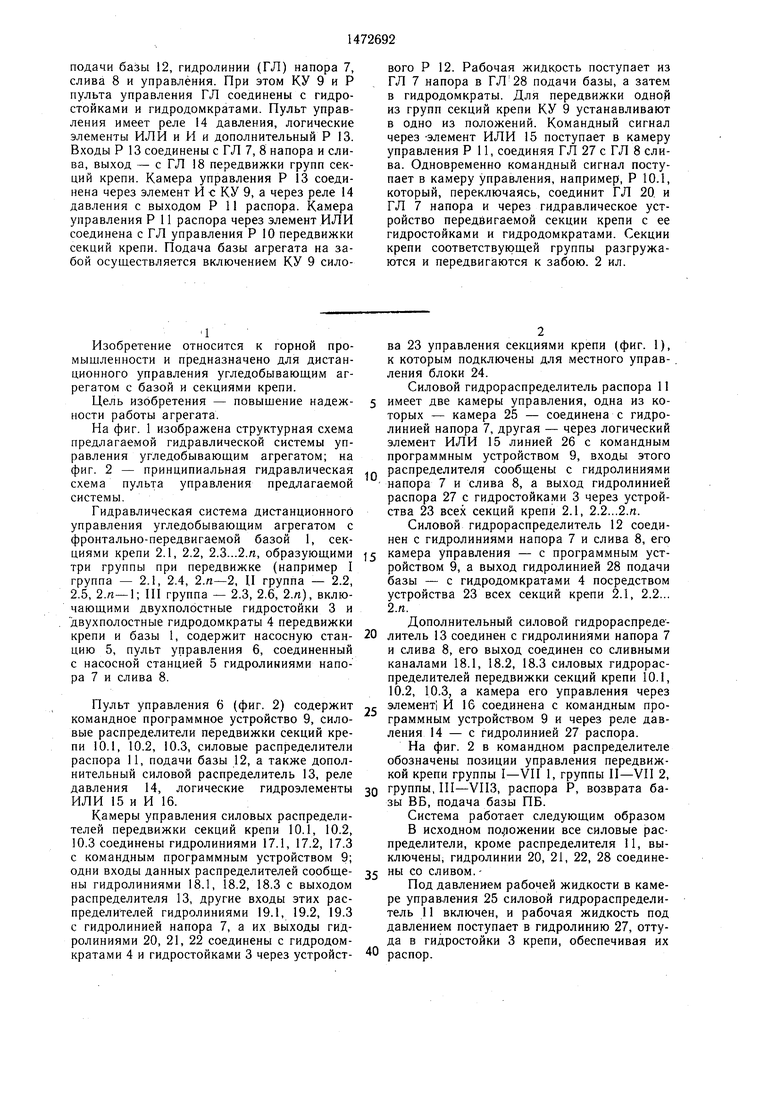
| название | год | авторы | номер документа |
|---|---|---|---|
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| Система гидравлического дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1528925A1 |
| Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата | 1988 |
|
SU1703827A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1989 |
|
SU1652602A2 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Гидравлическая система | 1990 |
|
SU1796771A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
Изобретение относится к горной промышленности и предназначено для дистанционного управления угледобывающим агрегатом с базой и секциями крепи. Цель - повышение надежности работы агрегата. Система управления содержит гидростойки и гидродомкраты передвижки групп секций крепи. Гидравлическая система управления включает пульт управления с командным устройством (КУ) 9 и распределители (Р) передвижки секции крепи 10, распора 11, подачи базы 12, гидролинии (ГЛ) напора 7, слива 8 и управления. При этом КУ 9 и Р пульта управления ГЛ соединены с гидростойками и гидродомкратами. Пульт управления имеет реле 14 давления, логические элементы ИЛИ и И и дополнительный Р 13. Входы Р 13 соединены с ГЛ 7, 8 напора и слива, выход - с ГЛ 18 передвижки групп секций крепи. Камера управления Р 13 соединена через элемент И с КУ 9, а через реле 14 давления с выходом Р 11 распора. Камера управления Р 11 распора через элемент ИЛИ соединена с ГЛ управления Р 10 передвижки секций крепи. Подача базы агрегата на забой осуществляется включением КУ 9 силового Р 12. Рабочая жидкость поступает из ГЛ 7 напора в ГЛ 28 подачи базы, а затем в гидродомкраты. Для передвижки одной из групп секций крепи КУ 9 устанавливают в одно из положений. Командный сигнал через элемент ИЛИ 15 поступает в камеру управления Р 11, соединяя ГЛ 27 сГЛ 8 слива. Одновременно командный сигнал поступает в камеру управления, например, Р 10.1, который, переключаясь, соединит ГЛ 20 и ГЛ 7 напора и через гидравлическое устройство передвигаемой секции крепи с ее гидростойками 3 и гидродомкратами 4. Секции крепи соответствующей группы разгружаются и передвигаются к забою. 2 ил.
| Гидросистема механизированной распорно-шагающей крепи | 1974 |
|
SU615230A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Оборудование для очистных и проходческих работ: Каталог, М.: ЦНИИЭИуголь, 1986, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
