Изобретение относится к машиностроению, в частности, к электроприводу агрегатов перемотки и обработки полосового материала в руло- нах.
Целью изобретения является повыение производительности уменьения Времени простоев агрегата при осмотрах полосы, что достигается д за счет обеспечения режима стоянки с натянутой полосой.
На чертеже представлена функциональная схема агрегата,
В состав электропривода агрегата, ,с- выполненного в виде разматывателя 1 и моталки 2, входят электродвигатель 3 разматьшателя и электродвигатель 4 мотагаси, измерительный ролик 5 инейной скорости полосы, связанный -,| механически с измерителем 6 скорости (выполненным, например, в виде тах ог.енератора), а также измеритель 7 скорости вращения привода моталки, Схема управления электродвигателями js 3 и 4 состоит из регулятора 8 ско рости и регулятора 9 тока, подключенного к входу источника (преобразователя) 10 питания электродвигателя 4, а также регулятора 11 натяжения ,, подключенного к источнику (преобразователю) г2 питания электродвигателя 3. ,
Задатчиком 13 натяжения и задат- чиком 14 скорости задаются соответственно натяжение и скорость перемотки полосы. Вычислительньш блок 15 служит для определения по сигналам измерителя, линейной скорости полосы и измерителя 7 угловой скорости моталки радиуса рулона на моталке, выход вычисли- тельного блока 15 подключен одновременно к входам двух множительных блоков 16 и 17, выход второго множительного блока 17 подключен к одному из входов делительного блока 18 (делимое), на другой вход которого подключен выход датчика 19 потока возбуждения электродвигателя моталки (делитель),. Выход блока 18 деления подключен к второму входу ре- гулятора 9 тока, а выход первого мно жиteльнoгo блока 16 соединен с вторым входом регулятора 8 скоростиj чем обеспечиваются обратные связи потоку и скорости в электроприводе мо- 55 талки.
Электропривод агрегата перемотки работает следующим образом.
35
д
,с- -,| s ,
5
5
Б динамическом режиме при наличии натяжения на разматывателе на один из входов множительного блока ,17 с задатчика 13 натяжения подается сигнал, пропорциональньй величине заданного натяжения электропривода разматывателя, и путем умножения этого сигнала на сигнал, пропорциональньй вычисленному в блоке 15 радиусу рулона на барабане моталки 2, поданньм на второй вход блока 17 от вычислительного блока 15, и деления полученного произведения в делительном блоке 18 на величину пропорциональную потоку возбуждения электродвигателя 4j ::оторая в виде сигнала датчика 19 vioToi-ca подается на вход (делитель) делительного блока 18, на Бьпсоде ei o формируется сигнал задания тока и подается на вход регулятора 9 тока электродвигателя моталки 4 Это обеспечивает создание электродвигателем 4 моталки 2 вращающего момента, уравновешивающего момент, создаваемьш электродвигателем 3 раз- катьшателя 1j что позволяет осуществить стабильную стоянку агрегата с натянутой полосой„ Кроме этого положительного эффекта наличие на входе рег улятора 9 тока сигнала, сформированного описанным выше образам, по- вьшает точность регулирования скорости полосы, так как уменьшает статическую оЕшбку на вкод регулятора 8 скорости,, связанную с необходимостью формирования на выходе регулятора 8 скорости снгнах а задания регулятору 9 тока.
Работа устройства в динамическом релдаме заключается в том, что на - один из входов первого множительного блока 16 подается сигнал от измерителя 7 скоро.сти (тахогенератора) двигателя 4 моталки 2, пропорциональ- ньш скорости вращения привода моталки 2, и путем умножения этого сигнала на сигнаЛ; пропорциональный вычисленному в устройстве 15 радиусу рулона на барабане моталки 2,, подантгый на второй вход первого множительного блока 16, на выходе его формируется сигнал, пропорциональньй линейной скорости полосы, исполь- зуемьй в качестве сигнала обратной связи в регуляторе 8 скорости, что позволяет отказаться от использования для этой цели датчика скорости
3
полосы тахогенератора 6 измерительного ролика 5.
Таким образом, путем подачи на вход регулятора тока электропривода моталки задающего сигнала, зависящего от радиуса рулона на барабане моталки, потока возбзгждения электродвигателя моталки и величины заданного йатяжения полосы на агрегате, на валу моталки создается момент, компенсирующий в режиме стоянки с натяжением момент, создаваемый электроприводом разматьшателя, обеспечивая тем самым надежную стоянку агрегата с натянутой полосой для выполнения технологических операций, требующих такого режима работы.
Кроме того, сигнал обратной связи по скорости полосы, подаваемый
27283 .
в регулятор скорости моталки, форми- руется из сигнала и.змерителя скорости вращения моталки, который кор- ректируется в функции сигнала, про- 5 порционального радиусу рулона на барабане моталки, что позволяет отказаться от использования для получения сигнала обратной связи по скорости полосы измерителя скорости,свя« 10 занного с измерительным роликом и исключает возможность возникновения аварийных режимов, при исчезновении связи между моталкой и измерительным роликом через полосу (обрыв полосы, f5 слабина при реверсе агрегата, проскальзывание полосы).
Этим обуславливается зффектив- . ность использования электропривода агрегата перемотки полосы.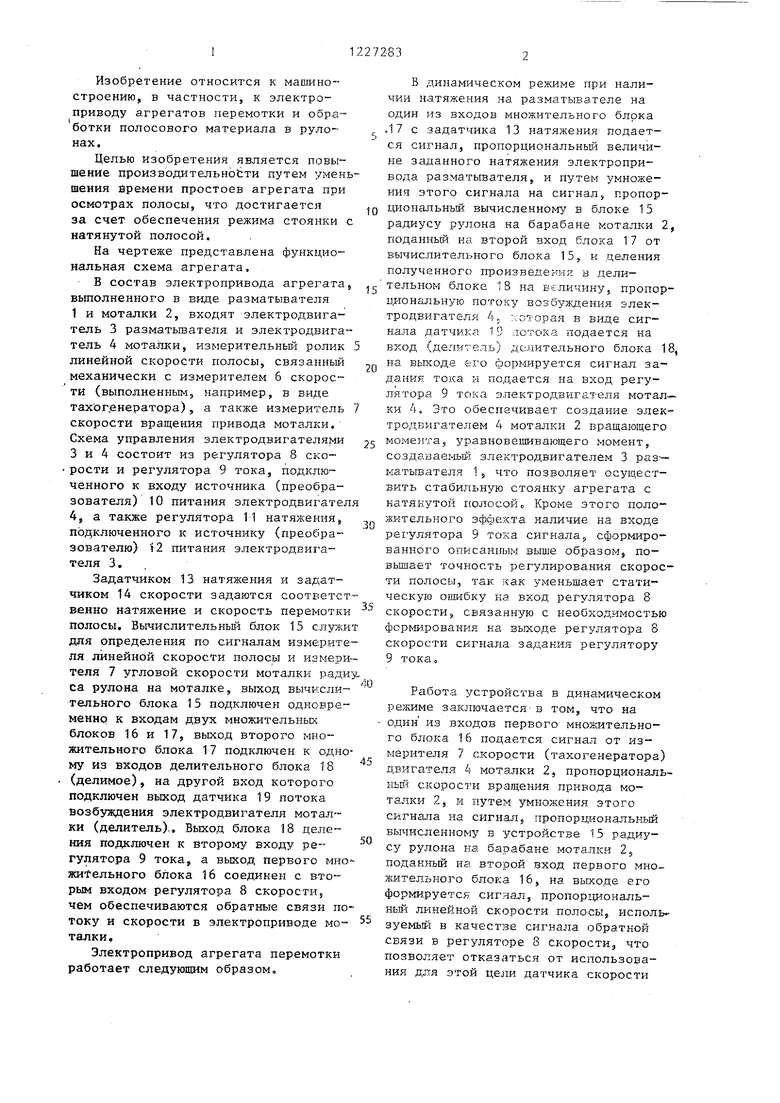
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводами агрегата перемотки рулонного проката | 1978 |
|
SU776696A1 |
| Устройство для стабилизации натяжения полосы на моталке | 1973 |
|
SU440180A1 |
| Устройство для управления агрегатом перемотки полосы | 1987 |
|
SU1574311A1 |
| Устройство для управления агрегатом перемотки рулонов | 1977 |
|
SU733751A1 |
| Устройство для перемотки ленты | 1979 |
|
SU841698A1 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |
| Агрегат дрессировки,правки и резки металлических полос | 1984 |
|
SU1168302A1 |
| Устройство для определения момента начала торможения агрегата обработки рулонного проката | 1980 |
|
SU933144A1 |
| Устройство для управления агрегатом перемотки рулонов | 1989 |
|
SU1622049A2 |
| Электропривод моталки стана холодной прокатки | 1975 |
|
SU535699A1 |
Составитель В. Стоколов Редактор Н. Слободяник Техред Л.Олейник Корректор Т.Колб
Заказ 2242/8Тираж 783Подписное
ВНИИПИ Государственного комитета СССР .
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
| Электроприводы моталки и раз- матывателя агрегата подготовки полосы Карагандинского меткомбината | |||
| Рабочие чертежи, т.№ 5601/5701,4.2, схемы 298468 и 2004019 | |||
| Изд | |||
| Харьковского института Тяжпромэлектро- проект, 1980. |
