Изобретение относится к механической обработке давлением листового, сортового, профильного материала и::и труб, в частности к устройствам механизации и автоматизации машиностроительного производства, а именно к манипуляторам (промышленным роботам).
Целью изобретения является улучшение динамических характеристик за счет сш.жения числа подвижных и трущихся частей.
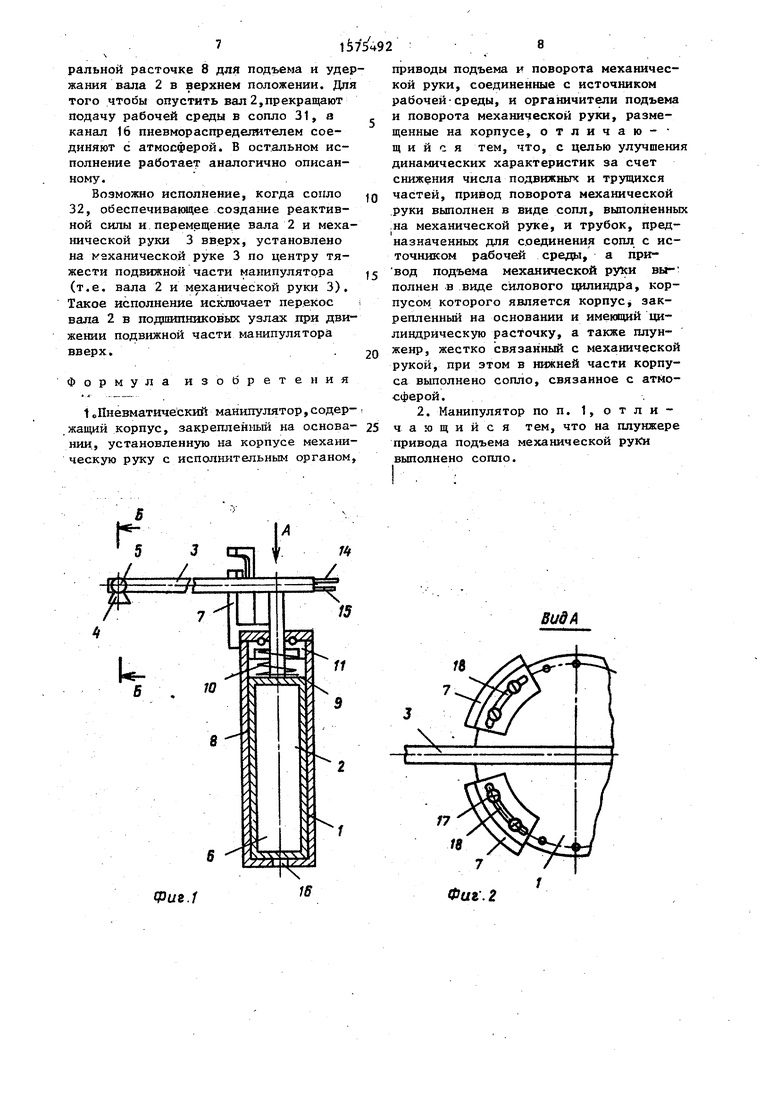
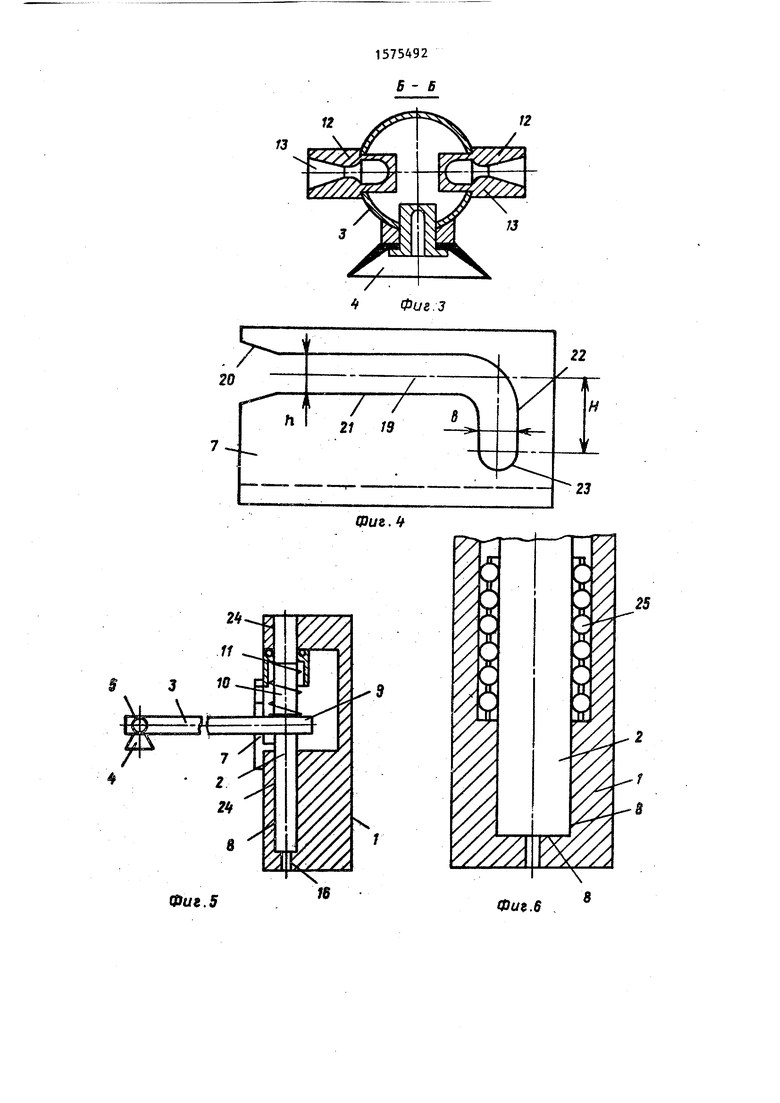
На фиг. 1 изображен схематично манипулятор пневматический, продольный разрез; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - развертка
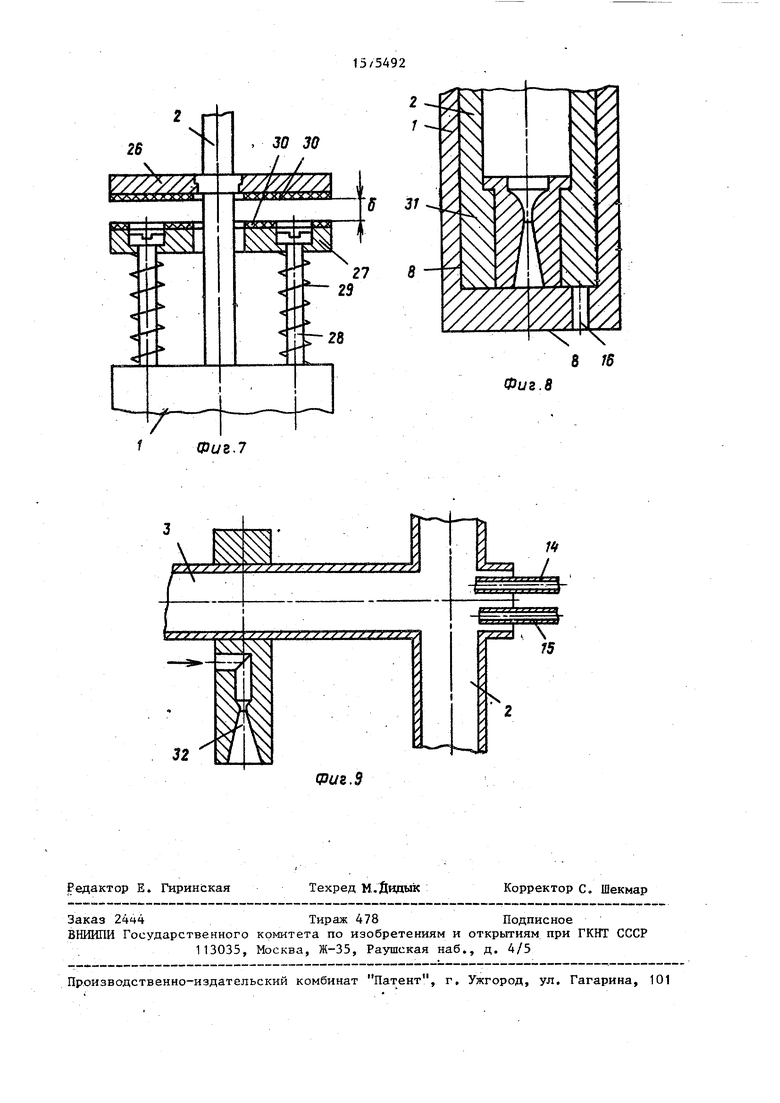
паза ограничителя; на фиг. 5 - вариант исполнения вала манипулятора; на фиг. 6 -(вариант установки вала в kopnyce; на фиг. 7 - устройство торможения вала; на фиг. 8 - размещение реактивного сопла на валу; на фиг. 9 - размещение реактивного сопла на механической руке.
Пневматический манипулятор содержит корпус 1, закрепленный на основании вертикальный вал 2, механическую руку 3 с исполнительным органом 4, привод 5 поворота механической руки, привод 6 подъема механической руки, ограничители 7 подъема и ловорота механической руки.
В корпусе 1 выполнена цилиндрическая расточка 8, в которой размещен вал 2 с буртиком 9. Посредством пружины 10, упирающейся в буртик 9, этот вал 2 подпружинен относительно корпуса 1. Другим концом пружина Ю опирается на упорный подшипник 11. На валу 2 жестко закреплена механическая рука 3 с исполнительным органом 4 в виде вакуумной присоски, электромагнитного захвата и др. На .механической руке 3 закреплен привод 5 поворота механической руки, выполненный в виде двух сопл 12, расположенных в горизонтальной плоскости и направленных в противоположные стороны. Размещение сопл 12 на максимально возможном удалении от центра вала позволяет получить максимально возможный момент вращения при данном расходе рабочей среды и при том же развиваемом усилии (тяге). Сопла 12 имеют профилированные каналы 13, выполненные в виде су- ркающегося сопла или комбинации сужаю- щейся и расширяющейся частей (сопло лаваля). Профилированные каналы 13 сопл 12 предназначены для преобразования потенциальной энергии рабочей среды в кинетическую энергию потока. Каналы 13 соединены трубками 14 и 15 (например, из пластика) и посредством пневмораспределителя (на чертеже не показан) - с источником рабочей среды Пневмораспределитель осуществляет поочередную подачу рабочей среды в трубки 14 и 15, что обуславливает работу того или иного профильного канала 13 и создание реактивной силы в том или ином направлении.Это обеспечивает поворот механической руки 3 и вала 2 в соответствующем направлении. При этом система управления манипулятором обеспечивает очередность переключения пневмораспределителя, длительность
включения,а в необходимых случаях и торможение путем включения профильного канала 13, создающего реактивную силу, направленную встречно направлению вращения механической руки 3.
Привод 6 подъема механической руки выполнен в виде цилиндрической расточки 8 в корпусе 1 вала 2, работающего как плунжер пневматического или гидравлического цилиндра, и канала 16, в который подается рабочая среда от пневмо- или гидрораспределителя (на чертеже не «показан). Смазка поверхностей цилиндрической расточки 8 и вала
15
20
, 25
поворота механичес- пределах Г360° + 1оЈ
5492
2осуществляется рабочей средой, а также маслом, подаваемым сжатым воздухом, если сжатый воздух является рабочей средой. Величина вертикального хода Н вала 2 определяется расстоянием между буртиком 9 и упорным подшипником 11.
На корпусе 1 посредством болтов 17 s размещенных в пазах 18, закреплены с возможностью поворота относительно вертикальной оси корпуса 1 два ограничителя 7 подъема и поворота механической руки 3. В ограничителях 7 выполнены пазы 19, имеющие захоДную 20, горизонтальную 21 и вертикальную 22 части. При этом пазы 19 в ограничителях 7 размещены зеркально относительно вертикальной плоскости. Сами ограничители 7 представляют собой сектора дугой 45...60 , что позволяет регулировать угол кой руки 3 в пределах Г360° - 2 х (45°...60°)J и устанавливать исходное положение механической руки
3относительно корпуса 1.
В крайних положениях (при повороте) механическая рука 3 размещается в пазу 19, размеры которого по высоте h и ширине в несколько превышают соответствующие размеры поперечного сечения механической руки 3, что позволяет ей свободно проходить по горизонтальной 21 и вертикальной 22 частям паза 19. Выполнение нижней зоны 23 паза 19 в соответствии с профилем и размером поперечного сечения механической руки 3 обеспечивает надежную фиксацию руки 3 манипулятора на исходной и рабочей позициях. Исполнение вала 2 и механической руки 3 полыми снижает массу и момент инерции подвижной части манипулятора.
Работает манипулятор следующим образом. Н-а исходной позиции механическая рука 3 лежит на нижней зоне 23 паза 19. При подаче рабочей среды в канал 16 вал 2 поднимается, а рука 3 перемещается по вертикальной части 22 паза 19. К моменту выхода механической руки 3 на уровень горизонтальной части 21 паза 19 прекращается подача рабочей среды в канал 16 и осуществляется подача рабочей среды в одну из трубок 14, 15, что обеспечивает работу соответствующего сопла 12. Рабочая среда ускоряется в профилированном канале 13 и истекает в атмосферу, создавая реактивную силу, приложенную к
30
35
40
45
50
55
механической руке 3. Механическая ру- ка 3 совместно с валом 2 поворачивает- ,ся в соответствующую сторону и входит в заходную часть 20 паза 19. Подача рабочей среды в сопло 12 прекращается, а канал 16 соединяется с атмосферой.
Вследствие этого вал 2 и механическая рука 3 под действием собственной массы и пружины 10 опускаются, при этом рука 3, пройдя вертикальную ,часть 22 паза 19, массой подвижной части и пружиной 10 прижимается к нижней зоне 23 паза 19 и надежно фиксируется. Затем подается рабочая среда в канал 16 и вал 2 поднимается. К моменту ьыхода механической руки 3 на уровень горизонтальной части 21 паза 19 прекращается подача рабочей среды в канал 16 и осуществляется подача рабочей среды в соответствующее сопло 12, которое создает реактивную силу, вращающую механическую руку 3 в сторону исходной позиции. После захода механической руки 3 в заходную часть 20 паза 19 подача рабочей среды в сопло 12 прекращается, а канал 16 соединяется с атмосферой. Вследствие этого вал 2 и механическая рука 3 под действием собственной массы и пружины 10 опускаются, при этом механическая рука 3, пройдя вертикальную часть 22 паза 19, массой подвижной части манипулятора и пружины 10 прижимается к нижней зоне 23 паза 19 и надежно фиксируется. Рабочий цикл манипулятора выполнен. Далее работя манипулятора осуществляется аналогично описанному.
Выбор соответствующей скорости подачи рабочей среды в полость центральной расточки 8 через канал 16, скорости удаления рабочей среды из полости расточки 8, соответствующего расхода
10
15
20
25
30
35
40
ет такой манипулятор аналогично описанному.
Возможно выполнение манипулятора, когда вал 2 манипулятора в корпусе 1 установлен посредством шарикового под шипника 25, допускающего прямолинейное и вращательное движение вала. Это снижает силы трения и повышает жест- Јость установки вала 2 в корпусе 1. Работает такой манипулятор аналогич- ho описанному.
Возможно выполнение манипулятора, когда его вал 2 снабжен диском 26, жестко закрепленным на валу и периодически взаимодействующим с диском 27, установленным на корпусе 1 посредством направляющих 28 и подпружиненных посредством пружины 2У относительно корпуса. При этом поверхности диска 26 и 27, взаимодействующие между собой, снабжены прокладками 30 из фрикционного материала. Зазор 6 между прокладками 30 выбирается малым, порядка 1...3 мм, что обеспечивает взаимодействие прокладок 30 в начальный момент опускания вала 2, а также в конечный момент подъема вала 2. То есть значитепьную часть пути подъема и опускания вал 2 демпфирован относительно корпуса, что позволяет гасить колебания механической руки 3 в горизонтальной плоскости при подходе к точке позиционирования за счет рассеивания кинетической энергии при мкк роперемещениях одной накладки 30 отно сительно другой.
Работает исполнение аналогично опи санному за исключением того, что прак тически весь путь подъема и опускания механической руки 3 осуществляется пр взаимодействующих прокладках 30, что обеспечивает гашение колебаний механической руки в горизонтальной плосрабочей среды в сопла 12, длительности 45 кости. Так как это происходит в зоне
подачи рабочей среды, соответствующего усилия пружины 10, а в необходимей случаях, и торможение механической руки 3 посредством противовключения сопл 12 при ее подходе в крайние положения обеспечивает работу манипулятора практически без ударов.
Возможно выполнение манипулятора, когда вал 2 манипулятора установлен
50
точек позиционирования, то длительность успокоения механической руки 3 в точках позиционирования резко снижа ется.
Возможно исполнение, когда на валу 2 размещено сопло 31, которое обеспечивает создание реактивной силы, приложенной к валу 2 и поднимающей этот вал вверх. Истечение рабочей среды
на двух подшипниковых узлах 24, разме- из сопл 31 в центральную расточку 8, ценных по концам вала 2. Этоуменьшает канал 16 которой перекрыт пневморас- величину радиальных сил в подшипнике и снижает силу трения в подшипниках при вертикальном перемещении. Работапределителем (на чертеже не показан) обеспечивает использование реактивной силы и давления рабочей среды в цент
0
5
0
5
0
ет такой манипулятор аналогично описанному.
Возможно выполнение манипулятора, когда вал 2 манипулятора в корпусе 1 установлен посредством шарикового подшипника 25, допускающего прямолинейное и вращательное движение вала. Это снижает силы трения и повышает жест- Јость установки вала 2 в корпусе 1. Работает такой манипулятор аналогич- ho описанному.
Возможно выполнение манипулятора, когда его вал 2 снабжен диском 26, жестко закрепленным на валу и периодически взаимодействующим с диском 27, установленным на корпусе 1 посредством направляющих 28 и подпружиненных посредством пружины 2У относительно корпуса. При этом поверхности диска 26 и 27, взаимодействующие между собой, снабжены прокладками 30 из фрикционного материала. Зазор 6 между прокладками 30 выбирается малым, порядка 1...3 мм, что обеспечивает взаимодействие прокладок 30 в начальный момент опускания вала 2, а также в конечный момент подъема вала 2. То есть значитепьную часть пути подъема и опускания вал 2 демпфирован относительно корпуса, что позволяет гасить колебания механической руки 3 в горизонтальной плоскости при подходе к точке позиционирования за счет рассеивания кинетической энергии при мкк- роперемещениях одной накладки 30 относительно другой.
Работает исполнение аналогично описанному за исключением того, что практически весь путь подъема и опускания механической руки 3 осуществляется при взаимодействующих прокладках 30, что обеспечивает гашение колебаний механической руки в горизонтальной плос0
точек позиционирования, то длительность успокоения механической руки 3 в точках позиционирования резко снижается.
Возможно исполнение, когда на валу 2 размещено сопло 31, которое обеспечивает создание реактивной силы, приложенной к валу 2 и поднимающей этот вал вверх. Истечение рабочей среды
из сопл 31 в центральную расточку 8, канал 16 которой перекрыт пневморас-
пределителем (на чертеже не показан)-, обеспечивает использование реактивной силы и давления рабочей среды в центральной расточке 8 для подъема и удержания вала 2 в верхнем положении. Для того чтобы опустить вал 2,прекращают подачу рабочей среды в сопло 31, а канал 16 пневмораспределителем соединяют с атмосферой. В остальном исполнение работает аналогично описанному.
Возможно исполнение, когда сопло 32, обеспечивающее создание реактивной силы и перемещение вала 2 и механической руки 3 вверх, установлено на маханической руке 3 по центру тяжести подвижной части манипулятора (т.е. вала 2 и механической руки 3). Такое исполнение исключает перекос вала 2 в подшипниковых узлах при движении подвижной части манипулятора вверх..
Формула изобретения
1«Пневматический манипулятор,содержащии корпус, закрепленный на основа- нии, установленную на корпусе механическую руку с исполнительным органом,
приводы подъема и поворота механической руки, соединенные с источником рабочей-среды, и органичители подъема и поворота механической руки, размещенные на корпусе, отличаю- щ и и с я тем, что, с целью улучшени динамических характеристик за счет снижения числа подвижных и трущихся частей, привод поворота механической руки выполнен в виде сопл, выполненны на механической руке, и трубок, предназначенных для соединения сопл с источником рабочей среды, а при- вод подъема механической руки вы- полней в виде силового цилиндра, корпусом которого является корпус, закрепленный на основании и имеющий цилиндрическую расточку, а также плун- женр, жестко связанный с механической рукой, при этом в нижней части корпуса выполнено сопло, связанное с атмосферой .
2. Манипулятор по п. 1, отличающийся тем, что на плунжере привода подъема механической руКи выполнено сопло.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2008 |
|
RU2379556C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2178842C1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| ИНСТРУМЕНТ ДЛЯ ПОДВОДНОЙ ГИДРОДИНАМИЧЕСКОЙ ОЧИСТКИ ПОВЕРХНОСТИ (ВАРИАНТЫ) | 1998 |
|
RU2122960C1 |
| Манипулятор | 1989 |
|
SU1613318A1 |
| Манипулятор | 1987 |
|
SU1547198A1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
Изобретение относится к механической обработке давлением листового, .сортового, профильного материала, или труб, в частности к устройствам механизации и автоматизации машиностроительного производства, а именно к манипуляторам промышленным роботам. Целью изобретения является улучшение динамических характеристик за счет снижения числа подвижных и трущихся частей. Для этого на механической руке 3 закреплен привод 5 поворота механической руки, выполненный в виде двух сопл 12, расположенных в горизонтальной плоскости и направленных в противоположные стороны. Каналы 13 соединены трубками 14 и 15 и посредством пневмораспределителя с источником рабочей среды. Привод 6 подъема механической руки выполнен в виде цилиндрической расточки 8, в корпусе 1 вала 2, работающего как плунжер силового, например пневматического или гидравлического, цилиндра, 1 з.п. ф-лы, 9 ил.
Г
Фие.1
16
.Я
Фиг. 5
Г2
t Фиг з
22
Фиг. fy
25
Фиг.6
N
30 30
I /
Y/W//
f O-yXJuf д жх А1
1шЖШ
IX ЗСЖ TfffVX X ХТД
32
Фиг.З
Редактор Е. Гиринская
Техред М.Дндык
Заказ 24ч4Тираж 478Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
8
Фиг.8
Корректор С. Шекмар
| Пневмогидродвигатель | 1975 |
|
SU566030A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
