Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Цель изобретения - упрощение конструкции за счет совмещения функций привода переме1цения и схеага манипулятора в одном устройстве, а также расширение функциональных возможностей за счет контроля наличия обьекта манипулирования в схвате.
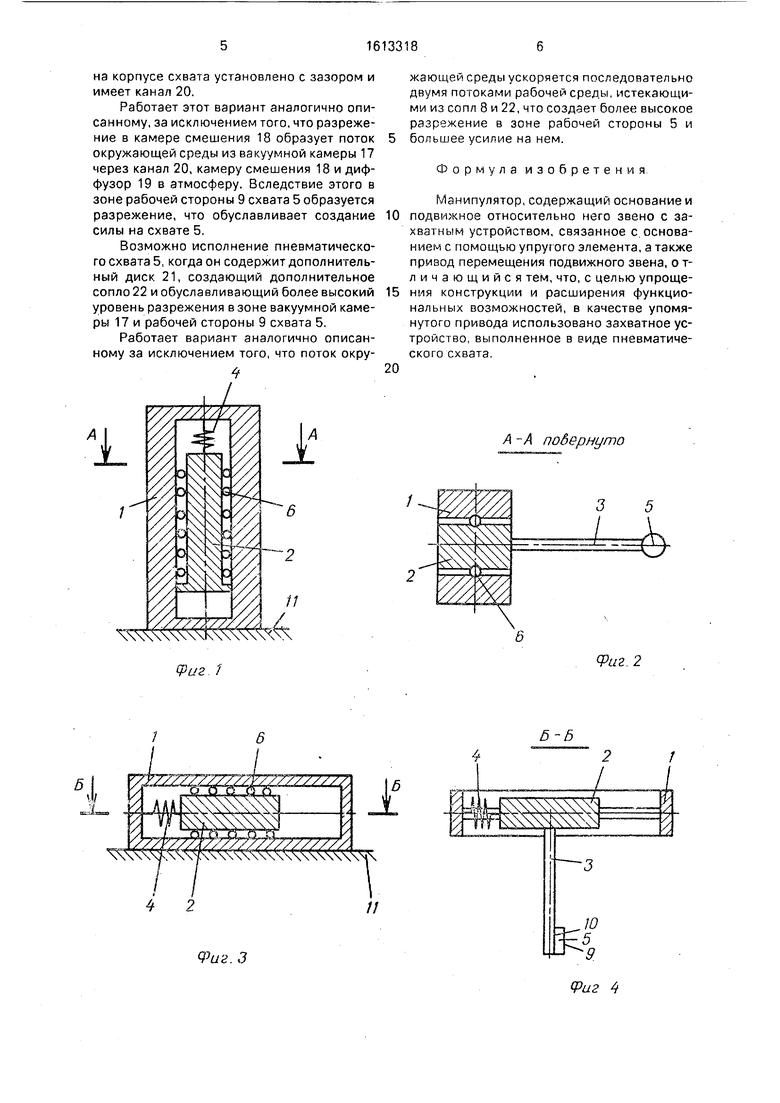
На фиг. 1 - схематически изображен манипулятор с вертикальным линейным пере- мещенме, продольный разрез, на фиг.2 - разрез А-А на фиг.1; на фиг.З - манипулятор с горизонтальным линейным перемещением, продольный разрез: на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - манипулятор с вращательным движением; на фиг.6 - вариант выполнения пневматического схвата; на фиг.7 - вариант выполнения пневматического схвата с основанием; на фиг.8 - то же, с дополнительным диском.
Манипулятор в варианте выполнения с вертикальным перемещением содержит корпус 1, подвижное звено 2, механическую руку 3. упругий элемент, например, пружину 4 и пневматический схват 5.
Подвижное звено 2 размещено в корпусе 1 с помощью линейного подшипника 6 и поджато вверх к корпусу 1 пружиной 4. В средней части подвижного звена 2 жестко закреплена механическая рука 3, на конце
о
ы
03
которой установлен пневматический схват 5, Пневматический схват 5 соединан с источником рабочей среды посредством гибкого трубопровода 7. Схват.имеет кольцевое зонтичное сопло 8, в котором происходит преобразование потенциальной энергии рабочей среды в кинетическую энергию потока, истекающего из сопла 8 в окрух-саю- щую среду, т.е. сопло 8 ускоряет поток рабочей среды. Если сопло 8 ммеет проф Мль, соответствующий сужающемуся соплу, то поток рабочей среды может быть ускорен до звуковой скорости. Если сопло 8 имеет профиль, соответствующий соплу Лаваля, т.е. комбинацию сужающегося и расширяюще- гося сопл, то поток рабочей среды может быть ускорен до сверхзэуковой скорости. Чем выше скорость потока рабочей среды, тем выше разрежение в этом потоке. Разрежение создает усилие притяжения объекта манипулирования к пневматическому схва- Ту 5 и усилие, действующее на пневр 1атиче- ский схват 5, поскольку с рабочей стороны 9. обращенной в сторону к объекту манипулирования, соз,цается разрежение, а с противоположной стороны 10 схвата 5 давление окружающей средь равно атмосферному. Рабочая сторона 9 охвата 5 расположена в плоскости, перпендикулярно,) направлению движения звена 2, Усилие, дей- ствуюш,ее ча схват 5, направлено от нерабочей 10 к рабочей стороне 9 пневматического схвата 5.
,Цля работы манипулятора необходимо, чтобы . силие, развиваемое охватом 5, было достаточно для удержания объекта манипулирования ы превышало усилие пружины 4, развиваемоэ ею в крайне нижнем положении зЕзна 2. Корпус 1 устанавливается на основание 11.
Манипулятор работает следующим об- рззом.
При подаче рабочей среды з пневматически / схЕЭт 5 ее поток ускоряется в сопле 8 и в атмосферу, где создается разрежение с рабочей С10ронь 9 охвата 5. Это поро ;сдает силу, приложенную к охвату 5 и направленную от нерабочей 10 к рабочей стороне 9 схвзта 5, Сс.зданное усилие перемешает схват 5, а вместе с ним механиче- скую руку 3 и подвижное звено 2 вниз м растягивает пружину 4 до те,: пор, пока схват 5 не захватит объект манипулирования. В ре,зультате этого объект г-.чанипулиро- взния схват 5 образуют цельный объект, на поверхностях которого да зление равно ат- мосо ерному. Пружина 4, охммаясь, перемещает по.дв /1жное звено 2, механическую руку 3, пневматический схват 5 и объект Mavi /inwjvipciaafw.q к мсходно -Г / положению.
После удаления со схвата 5 объекта манипулирования (либо механическим путем, либо путем кратковременного прекращения подачи рабочей среды) на схвате 5 вновь появляется сила, которая перемещает звено 2 и рукуЗ из исходного положения вниз и цикл работы повторяется. Пока объект не удален со схвата 5 звено 2 не будет перемещаться в нижнее положение.
В случае, если в нижнем положении звена 2 объект манипулирования захвачен не будет, то звено 2 не переместится обратно в исходное положение, поскольку на схват продолжает действовать определенное усилие. Тем самым осуществляется контроль наличия объекта манипулирования в схвате и его снятия со схвата и исключаются холостые перемещения звена 2.
Возможно исполнение манипулятора, когда подвижное звено 2 совершает горизонтальное линейное перемещение. В этом случае линейный подшипник 6 расположен в горизонтальной плоскости и подвижное звено 2 поджато пружиной 4 к одной стороне корпуса 1. При этом пневматический схват 5 установлен таким образом, что рабочая сторона 9 схвата 5 расположена в вертикальной плоскости поперек продольной оси манипулятора, т.е. поперек направления перемеиден.1я подвижного звена 2. При этом механическая рука 3 может быть расположена как в горизонтальной, так и в вертикальной плоскости.
Работает этот вариант аналогично описанному за исключением того, что подвижное звено 2 перемещается в горизонтальной плоскости.
Возможно исполнение манипулятора когда подвижное звено 2 выполнено в виде механической руки 3 со схватом 5, подпружиненной относительно основания 11 посредством пружины 12 и закрепленной на основании 11 посредством шарнира, представляющего собой установленную на подшипниках 13 ось 14. Рука 3 может быть расположена как в вертикальной, так и в горизонтальной плоскости. Рабочая сторона 9 схвата 5 расположена в плоскости, проходящей через ось 14.
.Работает этот вариант аналогично описанному, за исключением того, что механическая рука 3 вращается вокруг оси 14, а схват 5 перемеш.ается по дуге либо в горизонтальной, либо в вертикальной плоскости.
Возможно исполнение пневматического схвата 5, когда он содержит основание 15 схвата с уплотнением 16, образующим вакуумную камеру 17, камеру смешения 18 и диффузор 19, при этом основание 15 схвата
на корпусе схвата установлено с зазором и имеет канал 20.
Работает этот вариант аналогично описанному, за исключением того, что разрежение в камере смешения 18 образует поток окружающей среды из вакуумной камеры 17 через канал 20, камеру смешения 18 и диффузор 19 в атмосферу. Вследствие этого в зоне рабочей стороны 9 схвата 5 образуется разрежение, что обуславливает создание силы на схвате 5.
Возможно исполнение пневматического схвата 5, когда он содержит дополнительный диск 21, создающий дополнительное сопло 22 и обуславливающий более высокий уровень разрежения в зоне вакуумной камеры 17 и рабочей стороны 9 схвата 5.
Работает вариант аналогично описанному за исключением того, что поток окру0
5
жающей среды ускоряется последовательно двумя потоками рабочей среды, истекающими из сопл 8 и 22, что создает более высокое разрежение в зоне рабочей стороны 5 и большее усилие на нем.
Формула изобретения
Манипулятор, содержащий основание и подвижное относительно него звено с захватным устройством, связанное с, основанием с помощью упругого элемента, а также привод перемещения подвижного звена, о т- л и чающийся тем, что, с целью упрощения конструкции и расширения функциональных возможностей, в качестве упомянутого привода использовано захватное устройство, выполненное в виде пневматического схвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Пневматический манипулятор | 1988 |
|
SU1575492A1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Захват манипулятора | 1982 |
|
SU1126431A1 |
| РУКА РОБОТА | 2003 |
|
RU2247650C2 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Схват для сборки радиодеталей | 1979 |
|
SU812568A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |

Изобретение относится к машиностроению и может быть использовано при создании манипуляторов, автооператоров и промышленных роботов. Цель изобретения - упрощение конструкции и расширение функциональных возможностей. Устройство содержит установленное на основании, например в корпусе, подвижное звено, подпружиненное относительно основания или корпуса и несущее механическую руку с пневматическим схватом. Схват содержит сопло, которое при подаче в него рабочей среды создает разряжение с рабочей стороны схвата. В результате этого на схват действует сила, перемещающая подвижное звено с рукой из исходного положения. При этом пружина растягивается. При захвате объекта манипулирования сила, действующая на схват, пропадает и пружина возвращает подвижное звено с рукой в исходное положение. После удаления со схвата объекта манипулирования вновь возникшая сила опять перемещает подвижное звено в позицию загрузки. Если объект манипулирования не будет захвачен, то подвижное звено с рукой не вернется в исходное состояние, т.к. на схват будет продолжать действовать определенная сила, противодействующая сжатию пружины. 8 ил.
.,.,.j..vK%
с к 53-лл5 fpuz 1
. 3
А-А подернуто
6
(Риг. 2
Б-5
(Риг 4
V
(Риг.6
7 3
16 9 17 20
(Риг. 7
7 3
(Риг. 6
22 21
Ю 9 17 ID8D
(Риг. 8
| Устройство для переноса и разделения деталей | 1985 |
|
SU1247260A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
