Изобретение относится к радионавигации и может использоваться в радиотехнических системах с активным объектом.
Цель изобретения предотвращение ложной идентификации.
На фиг.1 представлена структурная схема устройства идентификации радиомаяка; на фиг.2 структурная схема вычислителя максимума; на фиг.3 структурная схема вычислителя минимума; на фиг.4 вариант реализации блока фильтрации; на фиг.5 и 6 временные диаграммы, поясняющие работу устройства; на фиг.7 диаграмма направленности радиомаяка в вертикальной плоскости с учетом интерференции прямой и отраженной волн; на фиг.8 структура напряженности электромагнитного поля, создаваемого радиомаяком на фиксированной высоте полета.
Устройство идентификации сигналов радиомаяка содержит антенно-фидерный блок 1, передатчик 2, блок 3 измерения азимута и дальности, блок 4 переключения каналов, приемник 5, блок 6 входных цепей, смеситель 7 азимута, усилитель 8 промежуточной частоты азимута, формирователь 9 азимутального импульса, смеситель 10 дальности, усилитель 11 промежуточной частоты дальности, дешифратор 12 и гетеродин 13, аналого-цифровой преобразователь 14, блок 15 фильтрации, вычислитель 16 максимума, первый блок 17 сравнения кодов, блок 18 задержки, вычислитель 19 минимума, первый регистр 20 кодов дальности, блок 21 деления, второй блок 22 сравнения кодов, элемент НЕ 23, хронизатор 24, счетчик 25, блок 26 памяти, второй регистр 27.
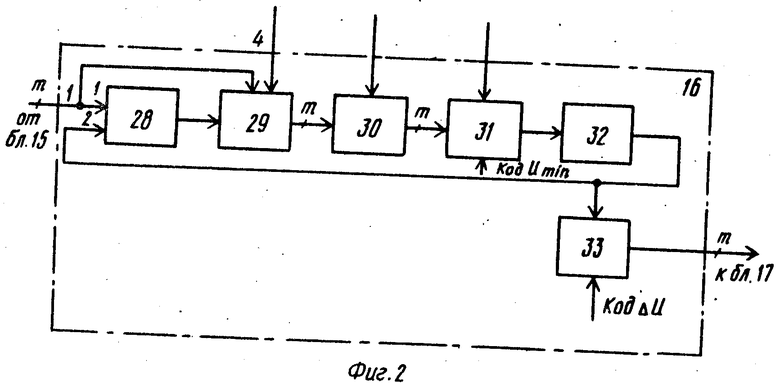
Вычислитель максимума (см. фиг.2) содержит блок 28 сравнения кодов, коммутатор 29, буферный регистр 30, мультиплексор 31, регистр 32 памяти, блок 33 вычитания.
Вычислитель минимума 19 фиг.3 содержит блок 34 сравнения кодов, первый коммутатор 35, первый буферный регистр 36, первый регистр 37 памяти, второй коммутатор 38, второй буферный регистр 39, второй регистр 40 памяти.
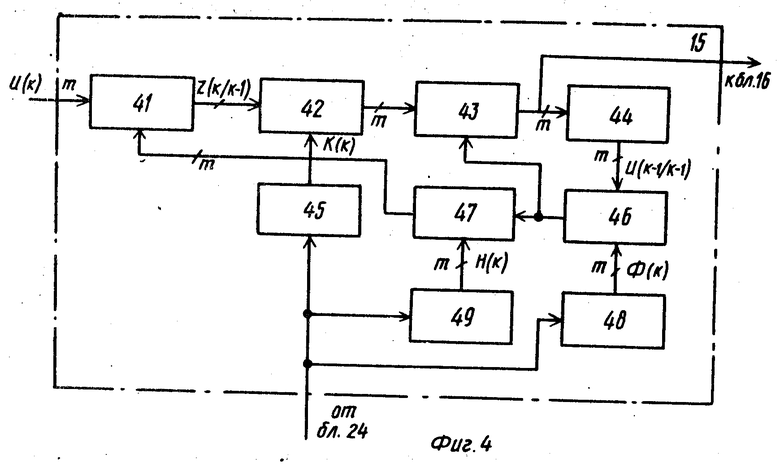
Блок фильтрации (фиг.4) содержит блок 41 вычитания, первый блок 42 умножения, блок 43 сложения, блок 44 задержки, первый блок 45 памяти, второй блок 46 умножения, третий блок 47 умножения, второй блок 48 памяти и третий блок 49 памяти.
Сущность способа заключается в следующем.
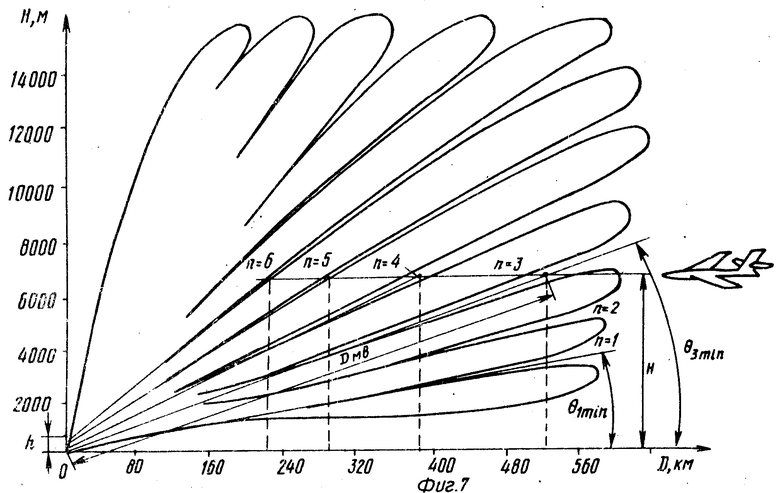
Известно, что в дециметровом диапазоне волн, в котором работают системы ближней навигации, технически невозможно применить антенны с большими апертурами, чтобы оторвать диаграмму направленности от подстилающей поверхности. Поэтому электромагнитное поле в точке приема представляет собой результат интерференции прямой и отраженной волн. В зависимости от угломестного положения точки приема разность фаз между прямой и отраженной волнами изменяется. На углах места, где разность фаз близка к 2πК (К целое число), амплитуды колебаний складываются, а на углах места, где она близка к π (2К+1), вычитаются. Поэтому на некоторых углах места напряженность результирующего поля больше напряженности прямого поля, а на некоторых углах места, напряженность результирующего поля уменьшается до нуля (фиг.7). В результате этого диаграмма направленности в вертикальной плоскости имеет лепестковый характер (локальные максимумы и минимумы).
Угломестное положение осей максимумов и минимумов диаграммы направленности радиомаяка является стабильным при неизменной рефракции и определяется из следующих соотношений: θnмин=arcsin (1) θnмакс=arcsin
(1) θnмакс=arcsin (1)I где θ nмин угломестное положение осей минимумов;
(1)I где θ nмин угломестное положение осей минимумов;
θ nмакс угломестное положение осей максимумов;
n 1, 2, 3, поpядковый номер локального экстремума диаграммы направленности антенны;
h высота электрического центра антенны радиомаяка над подстилающей поверхностью;
λ- длина волны колебаний несущей частоты передатчика.
Все перечисленные величины являются неизменными и однозначно характеризуют радиомаяк.
Для малых углов места (Qn≅6о) можно пользоваться следующими приближенными формулами: θnмин=  (2) θnмакс=
(2) θnмакс=  (3)
(3)
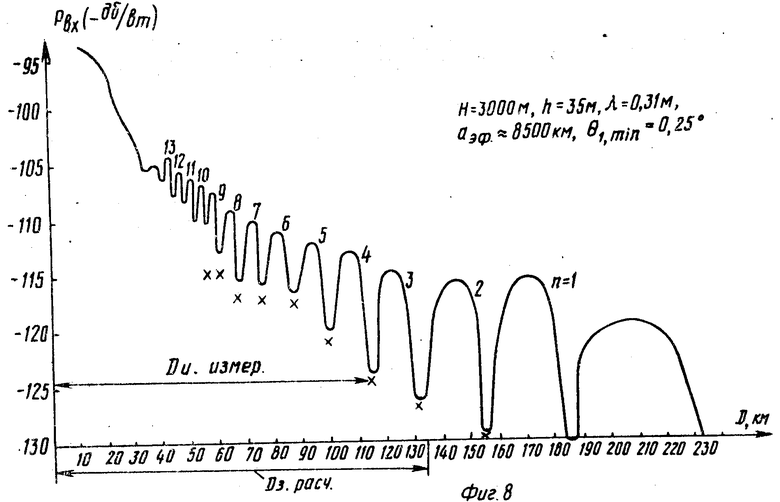
Неоднородность структуры напряженности поля диаграммы направленности в вертикальной плоскости, заключающее в себе информацию об угломестном положении осей максимумов и минимумов, отражается на амплитуде принимаемых сигналов в интерференционных минимумах и максимумах. В минимумах амплитуда сигналов может уменьшаться до нуля, а в зонах максимума диаграммы направленности существенно превышать истинную. Выделяя изменения амплитуды принимаемых сигналов и фиксируя моменты времени изменений в процессе полета ЛА, можно получить полную информацию об изменении структуры напряженности поля в вертикальной плоскости на данной высоте полета (фиг.8), а по определенному угломестному положению минимума (максимумов) произвести идентификацию радиомаяка.
Идентификацию можно производить по зонам как минимумов диаграммы направленности, так и максимумов. Однако для целей идентификации удобнее воспользоваться зонами минимумов, имеющих меньшую протяженность, что приводит в итоге к сокращению аппаратных затрат.
Для этого при полете ЛА на постоянной высоте H по направлению на радиомаяк последовательно во времени фиксируют минимальные амплитуды принимаемых сигналов радиомаяка, измеряют наклонные дальности D nизмот радиомаяка до точек пересечения осей минимумов с радиальным на радиомаяк направлением горизонтального полета, сравнивают получаемые значения дальности с известными дальностями Dпр минимумов напряженности электромагнитного поля излучения обслуживающего радиомаяка на данной высоте и по совпадению определяют принадлежность сигналов обслуживающему радиомаяку.
Дальности Dпр минимумов напряженности поля могут быть рассчитаны следующим образом. Порядковый номер минимума определяется через Dпр по формуле n  H
H  (4) где Н высота полета;
(4) где Н высота полета;
аэфф эффективный радиус Земли с учетом рефракции.
С учетом (2) формулу (4) можно представить в виде
n  2aэффH-D
2aэффH-D откуда получаем уравнение для Dпр
откуда получаем уравнение для Dпр
D n-2aэфф H=0 решение которого с учетом положительности Dпр имеет вид Dпр=0,5
n-2aэфф H=0 решение которого с учетом положительности Dпр имеет вид Dпр=0,5 (5)
(5)
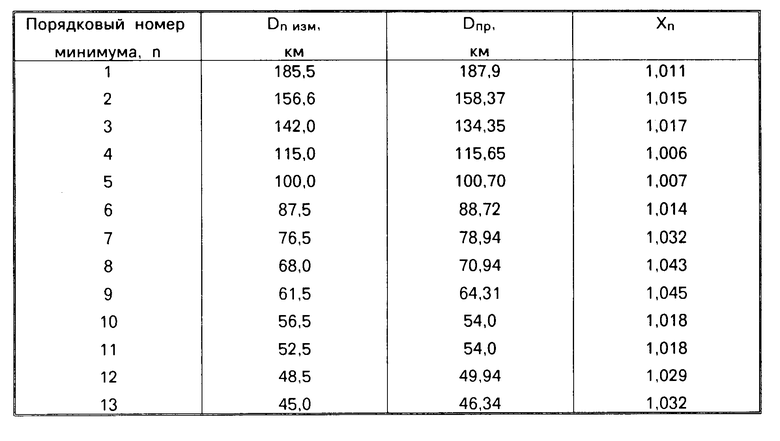
Для идентификации радиомаяка необходимо определить отношение наклонных дальностей Хn Dnизм/Dпр и по этому отношению сделать заключение о принадлежности радиомаяка. Если Xn 1 во всех минимумах, это означает, что ЛА работает с обслуживающим его радиомаяком. Если Хn≠1, то это означает, что измеренное и расчетное положение минимумов не совпадают, поэтому пилот информируется о работе с ложным радиомаяком. Однако на практике вследствие погрешностей измерения Xn≠1 даже для обслуживающего радиомаяка, поэтому в реальных устройствах следует учитывать эти погрешности и выполнять операцию сравнения с порогом C1≅Xn≅C2 (6)
В таблице приведены экспериментальные и расчетные значения дальностей Dnизм, Dпр, их отношение Хn, показывающие высокую точность предлагаемого способа. Данные получены для следующих условий
θмин 0,25о; аэфф 8500 км;
Н 3000 м; λ= 0,31 м; h 35 м.
Сущность предлагаемого способа заключается в использовании детерминированной неоднородности структуры напряженности поля диаграммы направленности радиомаяка в вертикальной плоскости для идентификации радиомаяка на борту летательного аппарата.
Устройство идентификации радиомаяка, реализующее предложенный способ, работает следующим образом.
Летательный аппарат, на котором установлено устройство, подлетая к зоне действия радиомаяка, переходит на траекторию полета на радиомаяк с постоянной высотой Н. р2 разрядный код высоты Н поступает на второй адресный вход блока 26 памяти. Одновременно в блоке 4 переключения каналов устанавливается номер частотно-кодового канала (ЧКК) радиомаяка, на который летит ЛА. р1 разрядный код номера ЧКК поступает в приемник 5 на входы гетеродина 13 и дешифратора 12 и в передатчик 2, настраивая устройство на этот ЧКК. Одновременно код номера ЧКК поступает на первый адресный вход блока 26 памяти, определяя с р2-разрядным кодом высоты Н зону памяти, в которой записаны коды дальностей Dпр минимумов, соответствующих данным номеру ЧКК (длине волны λ) и высоте Н. Далее в процессе полета из этой зоны памяти с помощью р3-разрядного кода счетчика 25 извлекаются коды Dпр (n1,2,3,).
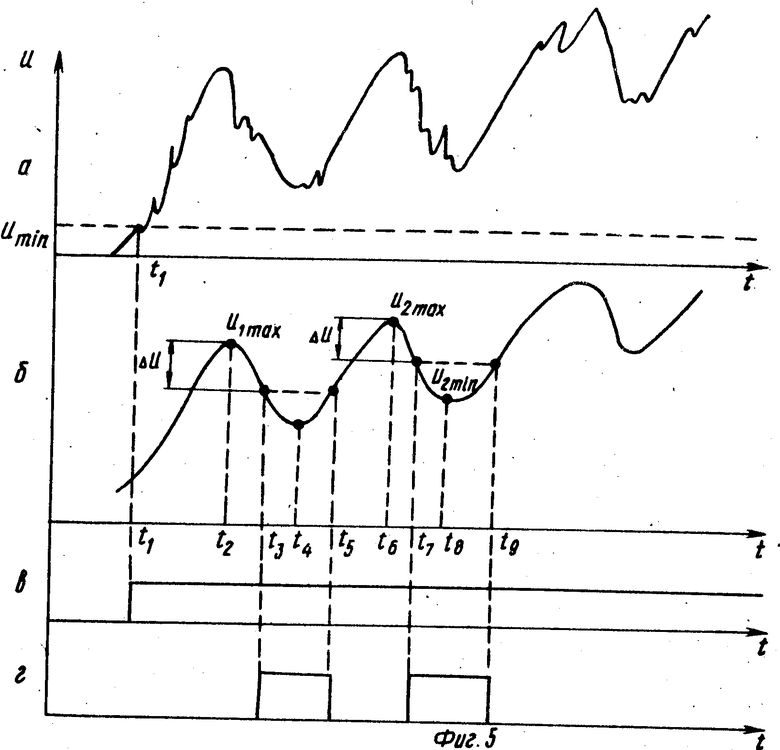
При совпадении номеров ЧКК устройства идентификации сигналов радиомаяка, представляющего собой фактически бортовое оборудование радиотехнической системы ближней навигации (РСБН), и радиомаяка на выходе напряжения автоматической регулировки усиления (АРУ) формирователя 9 азимутального импульса появляется напряжение АРУ, пропорциональное уровню мощности сигнала на входе антенно-фидерного блока (АФБ) 1 и повторяющее при изменении дальности форму сечения диаграммы направленности антенны радиомаяка в вертикальной плоскости прямой постоянной высоты Н (фиг.8). Зависимость UАРУ от времени при полете на радиомаяк изображена на фиг.5а. Эта зависимость имеет вид кривой с плавно чередующимися максимумами и минимумами, в которой могут наблюдаться относительно быстрые по сравнению с периодом кривой флюктуации, вызванные изменением мощности сигнала, принимаемого через изрезанные диаграммы направленности бортовых антенн ЛА.
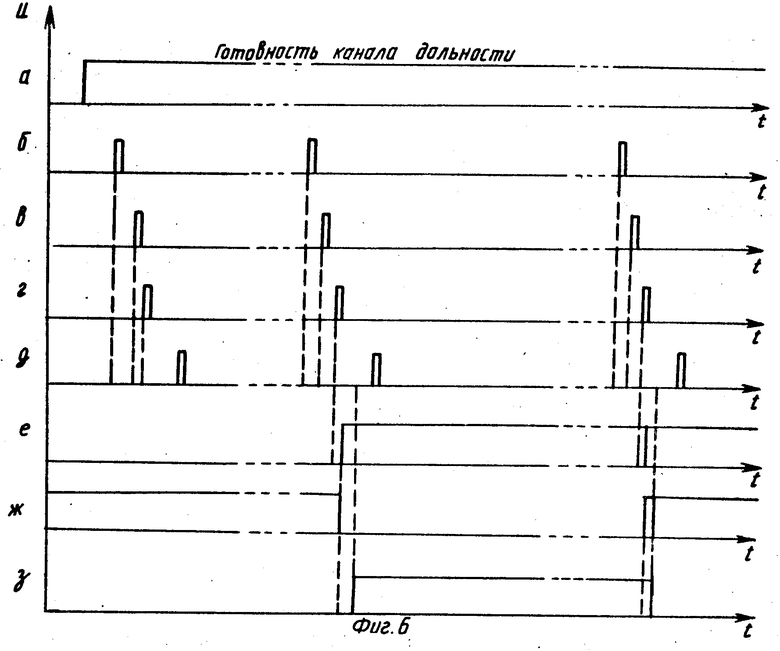
В момент t1 мощность сигнала на входе АФБ 1 становится достаточной для того, чтобы блок 3 измерения азимута и дальности принял решение о наличии дальномерных сигналов. При этом UАРУ > Uмин и на выходах сигнала готовности канала дальности и кода дальности блока 3 измерения азимута и дальности появляются, соответственно, и сигнал готовности канала дальности (фиг.5в) и код дальности Dnизм, изменяющийся далее во времени.
Сигнал готовности канала дальности с одноименного выхода блока 3 измерения азимута и дальности поступает на первый вход хронизатора 23, разрешая его работу на третий вход вычислителя 16 максимума, а также устанавливает передним фронтом в нуль счетчик 25, подсчитывающий минимумы диаграммы направленности. Код дальности поступает на третий вход вычислителя 19 минимума и на выход устройства (см. фиг.6а, ж, з).
Напряжение автоматической регулировки усиления с выхода формирователя 9 азимутального импульса поступает на аналого-цифровой преобразователь 14. Далее m-разрядный код этого напряжения поступает на блок 15 фильтрации, осуществляющий сглаживание напряжения АРУ (фильтрация быстрых флюктуаций). В качестве блока 15 фильтрации может быть использован любой цифровой фильтр, в частности, изображенный на фиг.4 фильтр Калмана. Импульсы начала преобразования в АЦП 14 (фиг.6в) и тактирования блока 15 фильтрации (фиг.6г) поступают на входы АЦП 14 и блока 15 фильтрации соответственно с второго и третьего выходов хронизатора 24. Они представляют собой задержанные на необходимое время импульсы запроса дальности, поступающие на второй вход хронизатора 24 с выхода запросов дальности блока 3 измерения азимута и дальности фиг.6б.
Сглаженное напряжение АРУ в виде m-разрядных кодов, следующих с периодом запросов дальности, поступает с выхода блока 15 фильтрации на первый вход вычислителя 16 максимума, четвертый вход вычислителя 19 минимума и второй вход первого блока 17 сравнения кодов. На фиг.5б изображена зависимость сглаженного напряжения АРУ в виде непрерывной кривой. Вычислитель 16 максимума, первый блок 17 сравнения кодов, элемент НЕ 23 и блок 18 задержки служат для управления вычислителем 19 минимума, который осуществляет определение локальных и минимумов в напряжении АРУ и перепись в первый регистр 20 кодов дальности, соответствующих этим минимумам.
Вычислитель 16 максимума может быть реализован по схеме фиг.2. m-разрядные коды напряжения АРУ поступают в вычислитель 16 максимума на первый блок вход блока 28 сравнения кодов, на второй вход которого поступает код из регистра 32 памяти. Тот же код, уменьшенный на величину ΔU, выбранную заранее меньшей, чем минимальная из разностей Uiмин Uiмакс, поступает с выхода блока 33 вычитания на первый вход первого блока 17 сравнения кодов. На выходе первого блока 17 сравнения кодов возникает лог.1, когда код на втором его входе меньше, чем на первом входе.
Когда сигнал готовности канала дальности (фиг.5в и фиг.6а) равен лог.0, регистр 32 памяти установлен через мультиплексор 31 в начальное состояние в него записан код числа Uмин > ΔU. В результате на первом входе первого блока 17 сравнения кодов будет код небольшого положительного числа Uмин ΔU.
После того, как сигнал готовности канала дальности станет равным лог.1, на выходе первого блока 17 сравнения кодов появится сигнал лог.0. На выходе элемента НЕ 23 появится сигнал лог.1, который разрешит работу вычислителя 16 максимума по четвертому входу.
На выходе блока 28 сравнения кодов возникает сигнал лог.1, когда код на его первом входе больше, чем на втором. Этот сигнал разрешает прохождение большого числа через коммутатор 29 с первого входа вычислителя 16 максимума в буферный регистр 30. Сигналом переписи (фиг.6д) от хронизатора 24 осуществляется перепись кода большего числа из буферного регистра 30 через открытый для него мультиплексор 31 в регистр 32 памяти. Таким образом, на восходящих ветвях кривой напряжения АРУ (интервалы t1 t2; t5 t6фиг.5б) в регистр 32 памяти на каждом такте блока 15 фильтрации записывается очередной из проходящих кодов. На нисходящих ветвях (интервалы t2 t4, t6 t8 фиг.5б) в регистре 32 памяти сохраняется код Uiмакс (i 1,2,) максимального их числа, соответствующий локальным максимумам напряжения АРУ. С выхода первого блока 17 сравнения кодов при U18 < U макс ΔU сигнал лог.1 через блок 18 задержки поступает на управление вычислителем 19 и минимума (фиг.5г и фиг.6д). Вычислитель 19 минимума работает в те моменты времени, когда не работает вычислитель 16 максимума.
Сигнал разрешения, приходящий на вход вычислителя 19 минимума, передним фронтом устанавливает в первом буферном регистре 36 код числа, заведомо большего максимально возможного кода напряжения ΔUАРУ.
На первый вход блока 34 сравнения кодов поступает m-разрядный код напряжения UАРУ с выхода блока 15 фильтрации. На второй вход блока 34 сравнения кодов поступает код с выхода первого регистра 37 памяти. На выходе блока 34 сравнения кодов возникает лог.1, когда код на его первом входе меньше, чем на втором. В этом случае меньший код через первый коммутатор 35 заносится в первый буферный регистр 36. В противном случае в первом буферном регистре 36 остается предыдущее значение кода UАРУ. Одновременно лог.1 с выхода блока 34 сравнения кодов разрешает прохождение соответствующего n-разрядного кода дальности с выхода кода дальности блока 3 измерения азимута и дальности через второй коммутатор 38 во второй буферный регистр 39. При наличии лог.0 на выходе блока 34 сравнения кодов в втором буферном регистре 39 остается код дальности, соответствующий предыдущему значению UАРУ. Сигнал записи, поступающий по первому входу в вычислитель 19 минимума с первого выхода хронизатора 24, осуществляет запись кодов из первого и второго буферных регистров 36 и 39 соответственно в первый и второй регистры 37, 40 памяти. К моментам окончания сигнала разрешения (фиг.5г) в втором регистре 40 памяти будет записан код дальности Dnизм, соответствующий минимальному значению кода UАРУ. Передним фронтом сигнала с выхода первого блока 17 сравнения кодов l-разрядный код дальности Dnизм, переписывается из вычислителя 19 минимума в первый регистр 20 (фиг.6е), а содержимое счетчика 25, определяющего порядковый номер минимума, увеличивается на единицу. Одновременно по p-разрядному адресу, определяемому р1-разрядным кодом высоты, р2-разрядным кодом ЧКК и р3-разрядным кодом номера минимума (p=p1+p2+p3) из блока 26 памяти и в второй регистр 27 переписывается l-разрядный код расчетной дальности Dпр минимума.
Таким образом, в интервалах времени отсутствия сигнала разрешения (фиг. 5г) с выхода первого блока 17 сравнения кодов в первом и втором регистрах 20, 27 будут записаны коды дальности Dnизм и Dпр в блоке 21 деления осуществляется вычисление кода частного Xn Dnизм/Dпр.
Полученный код поступает на вход второго блока 22 сравнения кодов, где осуществляется его сравнение с кодами 1-го и 2-го порогов.
Величины порогов подбираются экспериментально и определяют вероятность принятия правильного решения об идентификации радиомаяка, с которым работает устройство. Имеющиеся экспериментальные зависимости, полученные в результате полетов на различных высотах, в различных погодных условиях над морской поверхностью и сушей позволяют принять значения С1 и С2 1-го и 2-го порогов равными соответственно 0,95 и 1,05. Если код величины Хn+1 будет больше 0,95 и меньше 1,05, то второй блок 22 сравнения кодов выработает сигнал идентификации радиомаяка. В противном случае этот сигнал не вырабатывается.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1412474A1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| ПОДСИСТЕМА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ О ХАРАКТЕРИСТИКАХ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ, ЗАВИСЯЩИХ ОТ СВОЙСТВ РЕЛЬЕФА МЕСТНОСТИ | 1994 |
|
RU2087001C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |

Изобретение относится к радионавигации. Цель изобретения - предотвращение ложной идентификации. Существо способа идентификации сигналов радиомаяка заключается в том, что при полете летательного аппарата на постоянной высоте по направлению на радиомаяк последовательно во времени фиксируют минимальные амплитуды принимаемых сигналов радиомаяка, измеряют наклонные дальности от радиомаяка до точек пересечения осей минимумов с радиальным на радиомаяк направлением горизонтального полета, сравнивают полученные значения дальности с известными дальностями минимумов напряженности электромагнитного поля излучения обслуживающего радиомаяка на данной высоте и по совпадению определяют принадлежность сигналов обслуживающему радиомаяку. Устройство, реализующее предлагаемый способ, содержит антенно-фидерный блок 1, передатчик 2, блок измерения 3 азимута и дальности, блок переключения 4 каналов, приемник 5, блок входных цепей 6, смеситель 7 азимута, усилитель 8 промежуточной частоты азимута, формирователь 9 азимутального импульса, смеситель дальности 10, усилитель 11 промежуточной частоты дальности, дешифратор 12, гетеродин 13, аналогоцифровой преобразователь 14, блок фильтрации 15, вычислитель 16 максимума, блоки сравнения 17, 22 кодов, блок задержки 18, вычислитель 19 минимума, первый регистр кодов 20 дальности, блок деления 21, элемент НЕ 23, хронизатор 24, счетчик 25, блок памяти 26 и регистр 27. Даны ил. вычислителя 16 максимума, вычислителя 19 минимума и блока фильтрации 15. 2 с. п. ф-лы, 8 ил. 1 табл.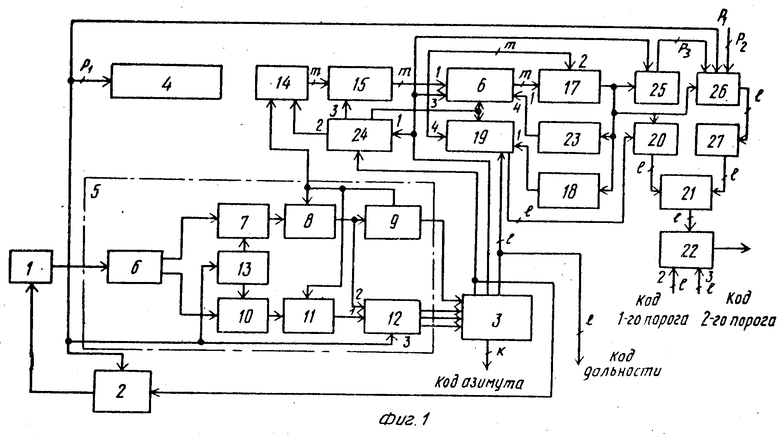
| Сосновский А.А., Хаймович И.А | |||
| Радиоэлектронное оборудование летательных аппаратов | |||
| М.: Транспорт, 1987, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
