Изобретение относится к машино - строению, а именно к робототехнике, и мохет быть использовано при автоматизации и механизации производственных процессов в различных отраслях промышленности, а также в дистанционных манипуляторах, рабе чашщих в зонах радиоактивного , в космосе.
Целью изобретения является упрощение конструкции за счет упрощения привода перемещения дополнительного направляющего механизма.
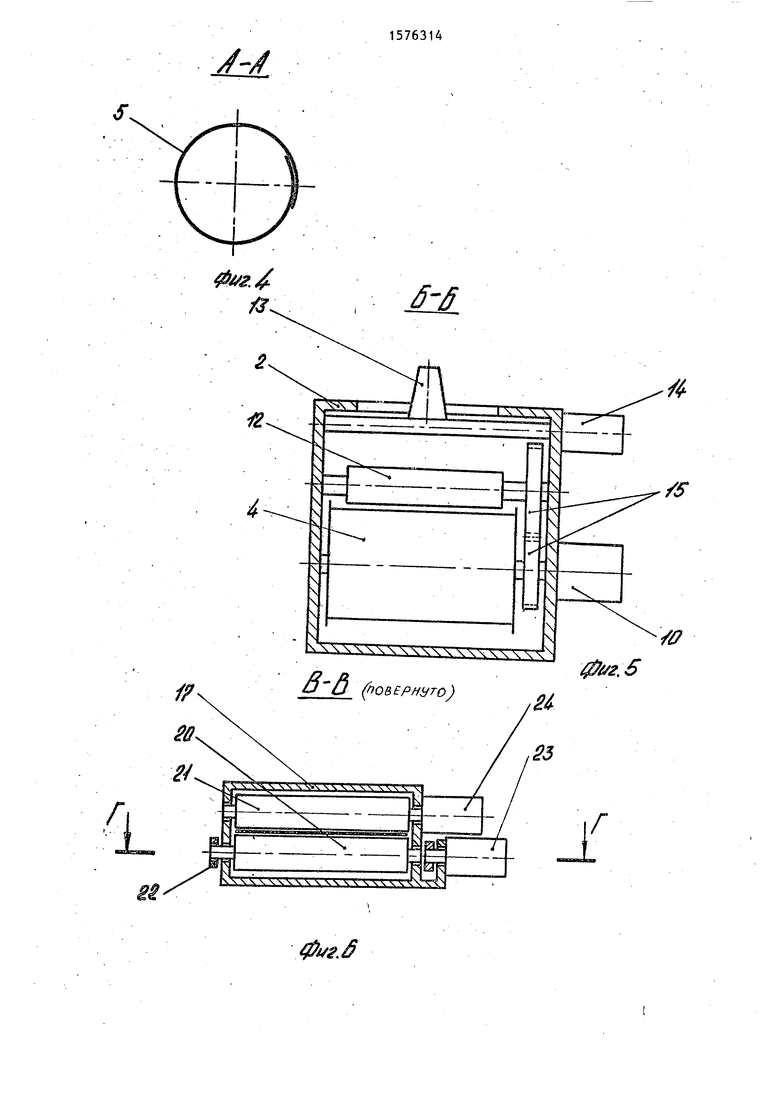
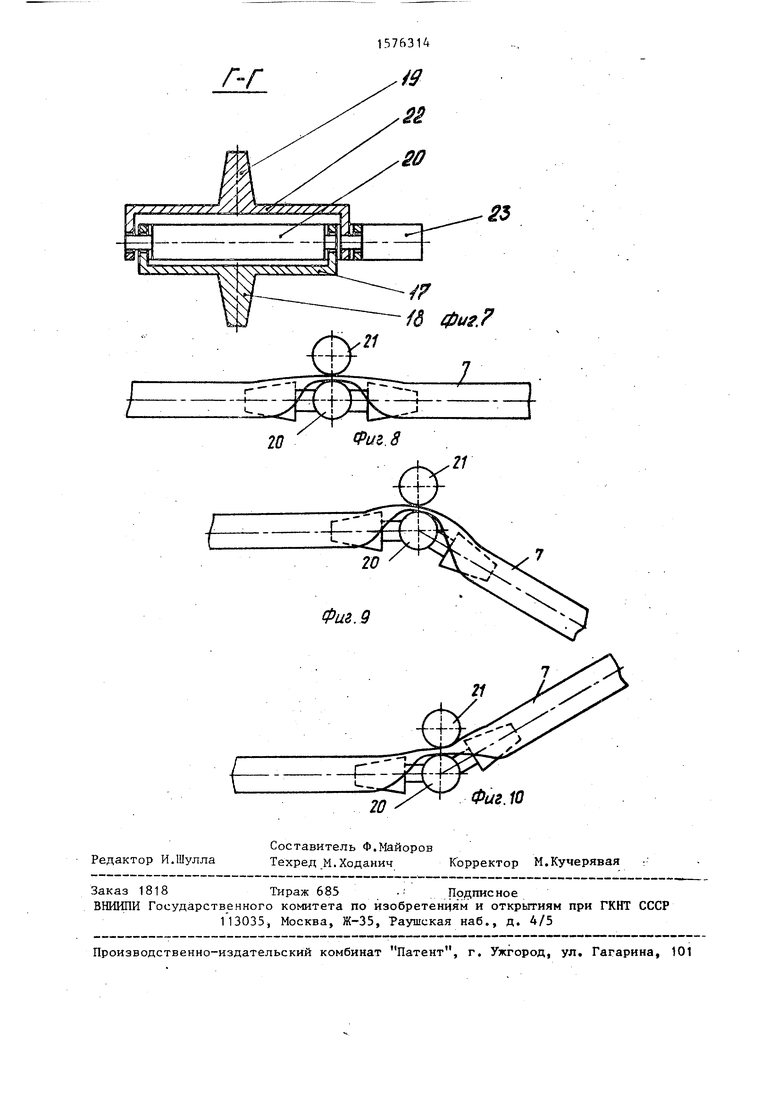
На фиг. 1 изображен манипулятор, общчй вид; на фиг. 2 - то же, со сложенной механической рукой; на фиг. 3 - механическая рука манипулятора, разрез (с одним дополнительным направляющим узлом); на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 3; на фиг 6 - разрез В-В на фиг. 3; на фиг. 7 - ра: рез Г-Г на фиг. 6; на фиг. 8 - шарнирный направляющий узел в работе, первое положение; на фиг. 9 - то же, второе положение; на фиг. 10 - то же третье положение.
Манипулятор содержит основание 1, на котором установлен корпус 2 с воз можностью поворота вокруг вертикальной оси от привода 3. Внутри корпуса 2 размещен барабан 4, с которого сматывается плоская упругая лента 5, проходя при этом через направляющий механизм 6 и образуя механическую руку 7 в виде тонкостенного цилиндрического профиля с перекрывающимися кромками. При этом один конец плоской упругой ленты 5 закреплен на цилиндрическом барабане 4, а на другом ее конце установлен фланец 8, служащий для крепления исполнительного
10
JS
30
35
40
45
50
55
органа, например захватного устройства 9. Вал барабана 4 кинематически связан с приводом 10. Направляющий механизм 6 включает два Фрикционных ролика 11 и 12, работающих в паре, и направляющий усеченный конус .13, установленный на вал/ и кинематичес- ш связанный с приводом 14. Ролик посредством зубчатой передачи 15 связан с приводом 10. Кроме того, на механической руке 7 с возможностью перемещения размещены дополнительные направляющие механизмы 16. Дополнительный направляющий механизм 16 содержит рамку 17, включающую два направляющих усеченных конуса 18 и 19, и два фрикционных ролика 20 и 21. При этом конус 18 неподвижно закреплен на рамке 17, а конус 19 закреплен на кронштейне 22, шарнирно связанном с рамкой 17 и кинематически связанном с приводом 23. Фрикционный ролик 21 кинематически связан с приводом 24.
Манипулятор работает следующим образом.
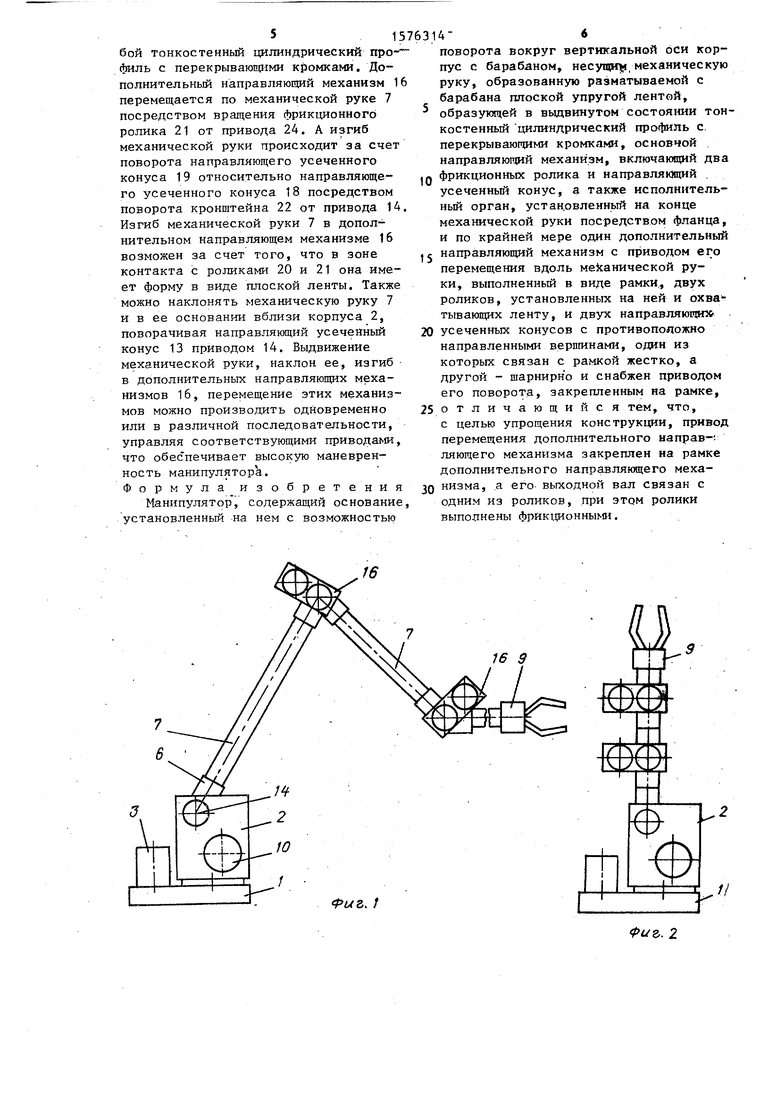
В исходном состоянии плоская упругая лента 5 намотана на барабан 4 при этом дополнительные направляющие механизмы 16 и фланец. 8 с захватным устройством 9 располагаются вплотную один к другому вблизи корпуса 2, упираясть при этом направляющим усеченным конусом 18 в направляющий усеченный конус 13, а фланцем 8 в направляющий усеченный конус 19. После включения привода 10, приводящего в движение барабан 4, начинает сматываться плоская упругая лента 5, которая, проходя между фрикционными роликами 11 и 12 и по направляющему усеченному конусу 13, образует механическую руку 7, представляющую собой тонкостенный цилиндрический профиль с перекрывающими кромками. Дополнительный направляющий механизм 1 перемещается по механической руке 7 посредством вращения фрикционного ролика 21 от привода 24. А изгиб механической руки происходит за счет поворота направляющего усеченного конуса 19 относительно направляющего усеченного конуса 18 посредством поворота кронштейна 22 от привода 14 Изгиб механической руки 7 в дополнительном направляющем механизме 16 возможен за счет того, что в зоне контакта с роликами 20 и 21 она имеет форму в виде плоской ленты. Также можно наклонять механическую руку 7 и в ее основании вблизи корпуса 2, поворачивая направляющий усеченный конус 13 приводом 14. Выдвижение механической руки, наклон ее, изгиб в дополнительных направляющих механизмов 16, перемещение этих механизмов можно производить одновременно или в различной последовательности, управляя соответствующими приводами, что обеспечивает высокую маневренность манипулятора.
Формула изобретения Манипулятор, содержащий основание установленный на нем с возможностью
5
поворота вокруг вертикальной оси корпус с барабаном, несущи механическую руку, образованную разматываемой с барабана плоской упругой лентой, образующей в выдвинутом состоянии тонкостенный цилиндрический профиль с перекрывающими кромками, основной направляющий механизм, включающий два
Q фрикционных ролика и направляющий усеченный конус, а также исполнительный орган, установленный на конце механической руки посредством фланца, и по крайней мере один дополнительный направляющий механизм с приводом его перемещения вдоль механической руки, выполненный в виде рамки, двух роликов, установленных на ней и охватывающих ленту, и двух направляющи
усеченных конусов с противоположно направленными вершинами, один из которых связан с рамкой жестко, а другой - шарнирн о и снабжен приводом его поворота, закрепленным на рамке,
5 отличающийся тем, что,
с целью упрощения конструкции, привод перемещения дополнительного направляющего механизма закреплен на рамке дополнительного направляющего мехаQ низма, а его выходной вал связан с одним из роликов, при этом ролики выполнены фрикционными.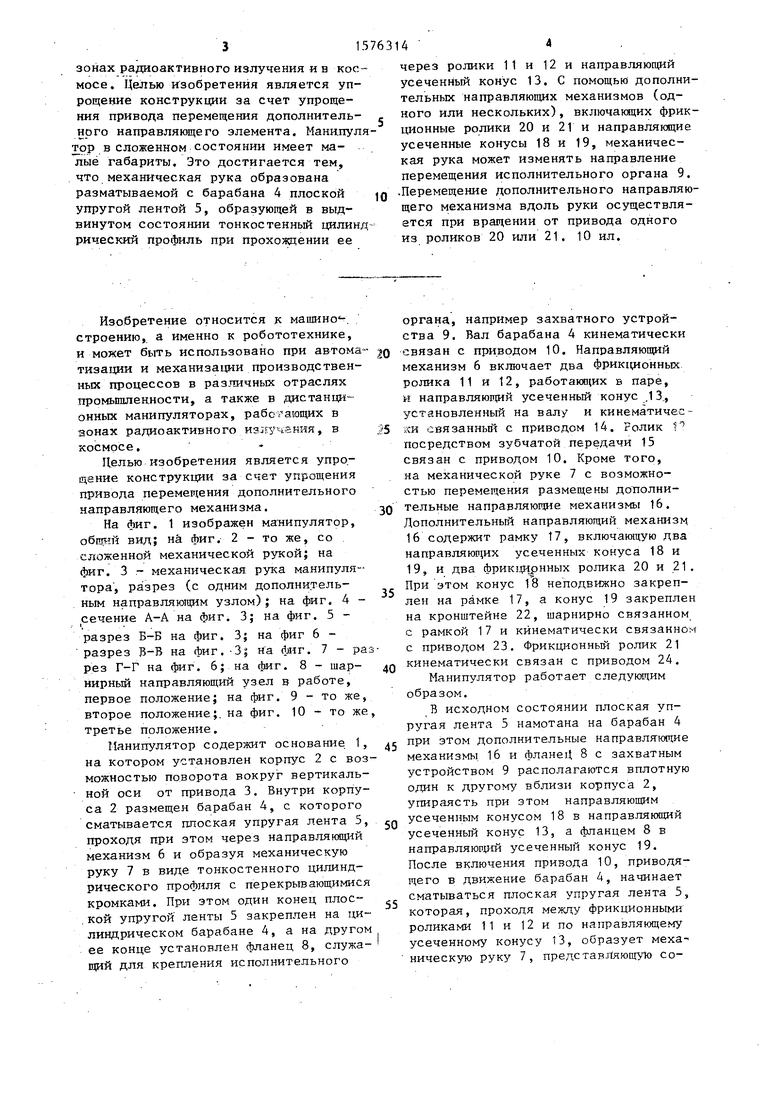
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1230813A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| УСТРОЙСТВО ДЛЯ ЛЕНТОЧНОГО ШЛИФОВАНИЯ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ | 1992 |
|
RU2053102C1 |
| Модуль манипулятора | 1991 |
|
SU1776556A1 |
| НЕСУЩАЯ МЕХАНИЧЕСКАЯ СИСТЕМА | 2006 |
|
RU2312761C1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| ВНУТРИТРУБНЫЙ БУКСИРОВЩИК ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2010 |
|
RU2434179C1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при автоматизации и механизации производственных процессов в различных отраслях промышленности, а также в дистанционных манипуляторах, работающих в зонах радиоактивного излучения и в космосе. Целью изобретения является упрощение конструкции за счет упрощения привода перемещения дополнительного направляющего элемента. Манипулятор в сложенном состоянии имеет малые габариты. Это достигается тем, что механическая рука образована разматываемой с барабана 4 плоской упругой лентой 5, образующей в выдвинутом состоянии тонкостенный цилиндрический профиль, при прохождении ее через ролики 11 и 12 и направляющий усеченный конус 13. С помощью дополнительных направляющих механизмов (одного или нескольких), включающих фрикционные ролики 20 и 21 и направляющие усеченные конусы 18 и 19, механическая рука может изменять направление перемещения исполнительного органа 9. Перемещение дополнительного направляющего механизма вдоль руки осуществляется при вращении от привода одного из роликов 20 или 21. 10 ил.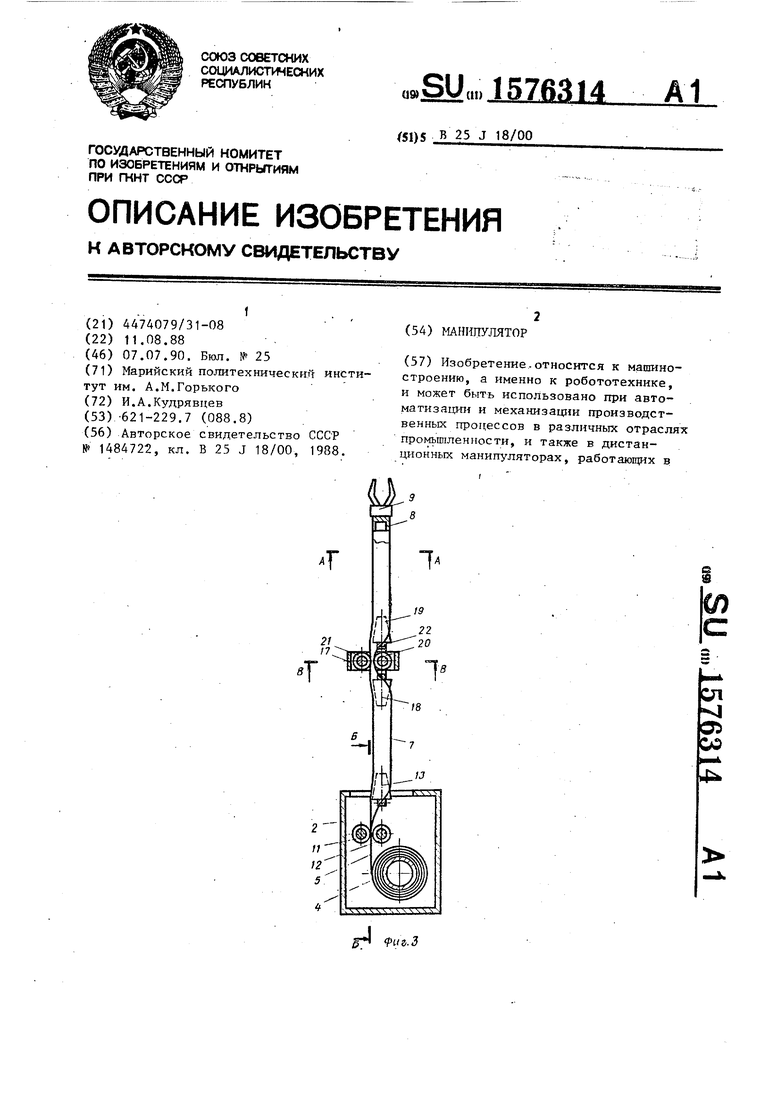
Фиг. f
f .
Ри&. 2
/-/
Д а
U U (ПОВЕРНУТО)
Г
фхг.Ј
«
fa.S
i -I
Г
Ј5
Фиг. 10
| Авторское свидетельство СССР № 1484722, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
