ч
to
ее
о
СХ) 00
фи8.1.
Изобретение относится к машиностроению, а именно к манипуляторам, и может быть использовано при автоматизации и механизации производственных процессов в различных отраслях промышленности, в складском хозяйстве и для работы в узких и длинных технологических каналах и трубопроводах.
Целью изобретения является повышение надежности и быстродействия за счет увеличения жесткости руки при легкости кон- струкции, а также расширение технологических возможностей путем обеспечения возможности работы в узких проходах и длинных технологических каналах.
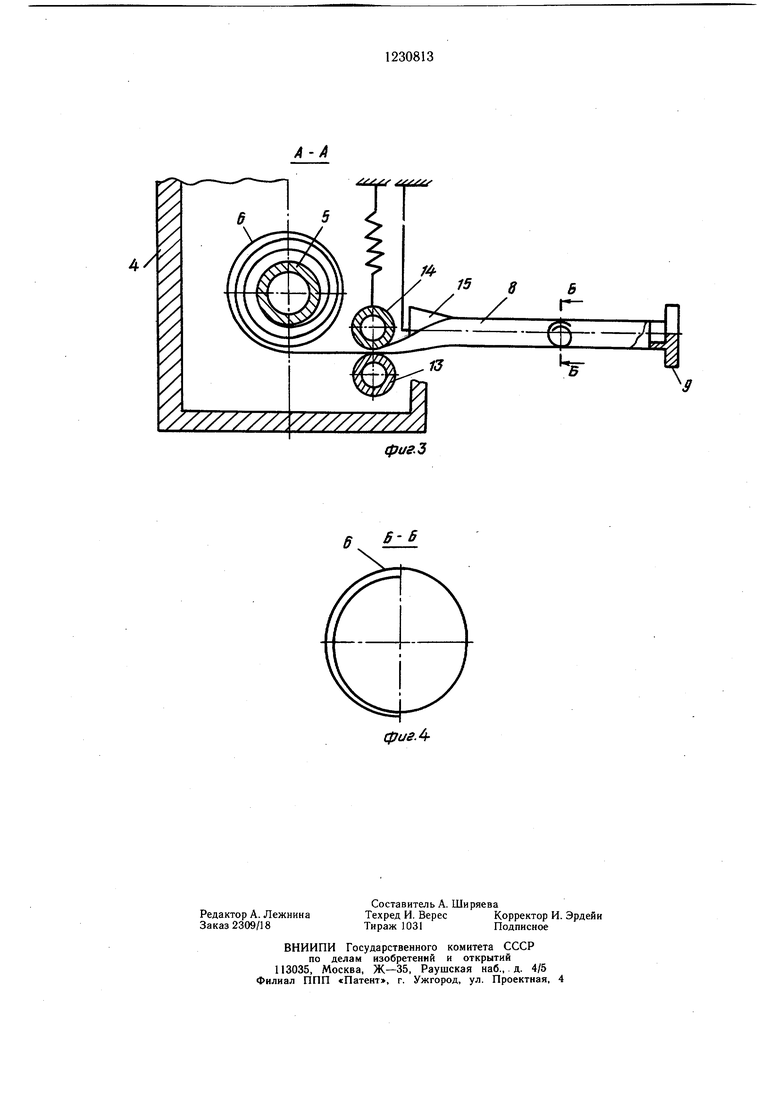
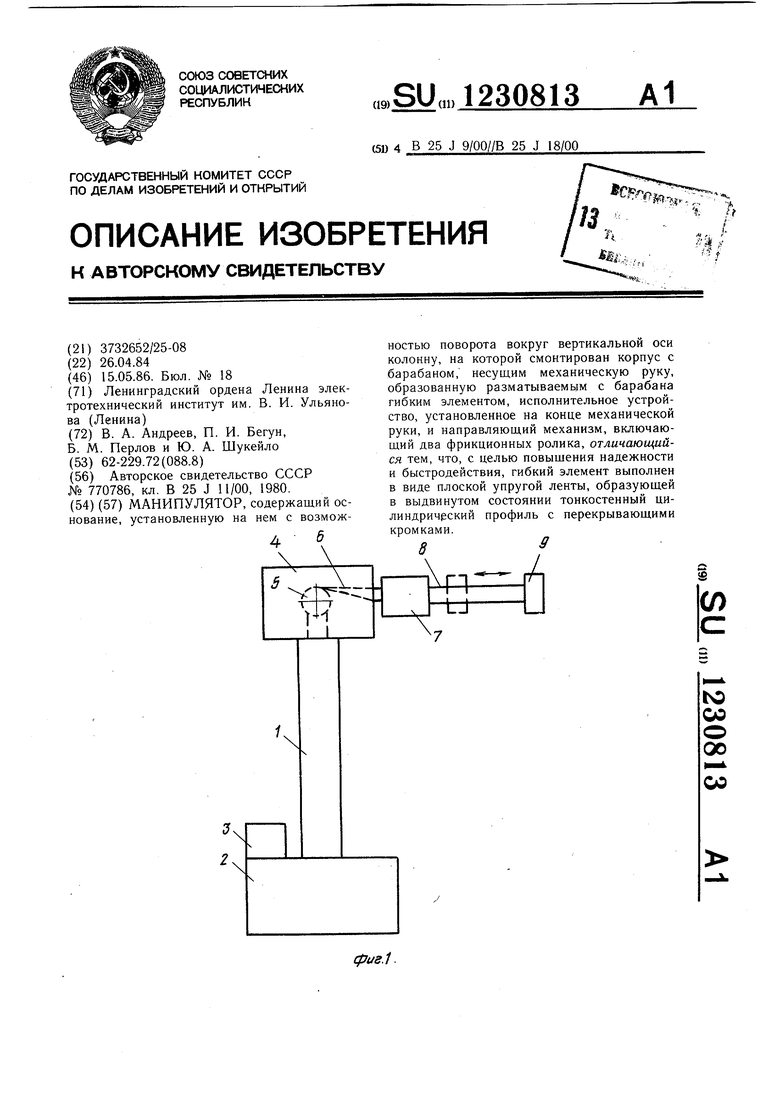
На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 - механическая рука манипулятора; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 3.
Предлагаемый манипулятор (фиг. 1) сое- тоит из поворотной колонны 1, установленной на основании 2 и поворачивающейся вокруг вертикальной оси с помош,ью привода 3. На поворотной колонне 1 смонтирован корпус 4 барабана 5, с которого сматывается плоская упругая лента 6, проходя при этом через направляющий механизм 7 и образуя механическую руку 8 в виде тонкостенного цилиндрического профиля с перекрывающими кромками. При этом один конец плоской упругой ленты 6 закреплен на ци- линдрическом барабане 5, а на другом ее конце установлен фланец 9, служащий для крепления захватного устройства или ин
0 о
5
струмента (щетки). Вал барабана 5 кинематически связан с приводом 10 (фиг. 2), на выходном валу которого установлено ведущее зубчатое колесо 11. Ведущее зубчатое колесо 11 находится в зацеплении с ведомым зубчатым колесом 12, на оси которого расположен фрикционный ролик 13 (фиг. 3). Ролик 13 работает в паре с подпружиненным относительно корпуса 4 фрикционным роликом 14. Кроме фрикционного ролика 13 и подпружиненного фрикционного ролика 14, направляющий механизм 7 включает направляющий усеченный конус 15, смонтированный на корпусе 4.
Манипулятор работае-т следующим образом.
К фланцу 9 крепится например, необходимое захватное устройство. После установки манипулятора в требуемое положение включается привод 10, приводящий в движение барабан с намотанной на него плоской упругой лентой 6, которая, проходя между фрикционными роликами 13 и 14 с направляющим усеченным конусом 1, образует механическую руку 8 представляющую собой тонкостенный цилиндрический профиль с перекрывающими кромками. По достижении необходимого размера механической руки 8 привод 10 отключается и происходит захват детали, затем при изменении направления вращения привода 10 механическая рука 8 начинает наматываться на барабан 5 и происходит перенос детали. В зависимости от технологических целей одновременно может работать и привод 3 поворота колонны 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1576314A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| Манипулятор | 1986 |
|
SU1437213A1 |
| ВОЛНОВАЯ ОТКЛЮЧАЕМАЯ ПЕРЕДАЧА | 2005 |
|
RU2293232C1 |
| Манипулятор | 1979 |
|
SU770786A1 |
| ГЕРМЕТИЗАЦИОННЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ЭКИПИРОВАННЫХ ФИЛЬТР-ЭЛЕМЕНТАМИ КОРПУСОВ СЕКЦИЙ ФИЛЬТРУЮЩИХ КОРОБОК | 1992 |
|
RU2045357C1 |
| ВНУТРИТРУБНЫЙ БУКСИРОВЩИК ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2010 |
|
RU2434179C1 |
Si
фигЗ
S-б
Редактор А. Лежнина Заказ 2309/18
ВНИИПИ Государственного комитета СССР
по делам изобретеиий и открытий
113035, Москва, Ж-35, Раушская нвб.,. д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
фиг Л
Составитель А. Ширяева Техред И. ВересКорректор И. Эрдейи
Тираж 1031Подписное
| Манипулятор | 1979 |
|
SU770786A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
