Фцг.1
Изобретение относится к машиностроению, в частности к элементам промышленных роботов, и может быть использовано в качестве привода пневматических автоматизированных машин,
Известны пневмопривод с пневмомеханическим фрикционным устройством, взаимодействующим с дополнительной штангой, связанной со штоком пневмоци- линдра Филипов И.Б. Тормозные устройства пневмоприводов. -Л.: Машиностроение, Ленинград,отд-ние, 1987. - с.20, рис.1.106); пневмопривод, состоящий из пневмоцилин- дра, шток которого соединен с направляющей, связанной с датчиком обратной связи, и фрикционного тормоза с пневмоприводом.
Недостатками указанных устройств являются низкая точность позиционирования, узкий диапазон регулирования скорости, приводы отличаются большими объемами пневматических камер фрикционных тормозов, что снижает их быстродействие, не имеют возможности шагового перемещения.
Наиболее близким по технической сущности решением является импульсный пневматический позиционер (прототип) (Промышленная робототехника), содержащий шток с внутренними каналами и составной поршень, каждая из двух одинаковых секций которого расположена между двумя дисками, жестко связанными со штоком, в секцию входит эластичное кольцо С-образ- ного профиля, фрикционное кольцо и корпус-кольцо, между корпусом-кольцом и эластичным кольцом каждой секции образуется камера, связанная через каналы в штоке с распределителем.
Данное устройство обладает теми же недостатками, которые присущи описанным выше аналогам, за исключением возможности шагового перемещения.
Целью изобретения является упрощение конструкции и расширение функциональных возможностей за счет введения упругого элемента между тормозными головками и штоком, расширяющего диапазон регулирования скорости и точность позиционирования.
Цель достигается тем, что пневмопривод, шток которого жестко связан с направляющими, снабжен двумя тормозными головками, а к концам направляющей жестко закреплен упругий элемент, установленный с возможностью контактирования с фрикционными элементами тормозных головок, причем упругий элемент выполнен в виде набора плоских лент, между которыми расположены фрикционные вставки, неподвижные в направлении перемещения штока, а тормозная головка выполнена в виде мембранного привода, совмещенного с электрон невмопреобразователем.
При сравнении известных модулей манипуляторов с предлагаемым видно, что последний обладает новыми техническими свойствами, которые заключаются в малости объема пневматических камер и хода штоков фрикционных тормозов,
0 возможности регулирования величины шага перемещения,, что позволяет повысить быстродействие, расширить диапазон регулирования скорости, повысить точность позиционирования.
5 Отличительные признаки являются существенными, так как в прототипе в силу наличия значительных объемов пневматических камер фрикционных тормозов, сложности регулирования величины шага
0 перемещения достичь поставленных целей невозможно.
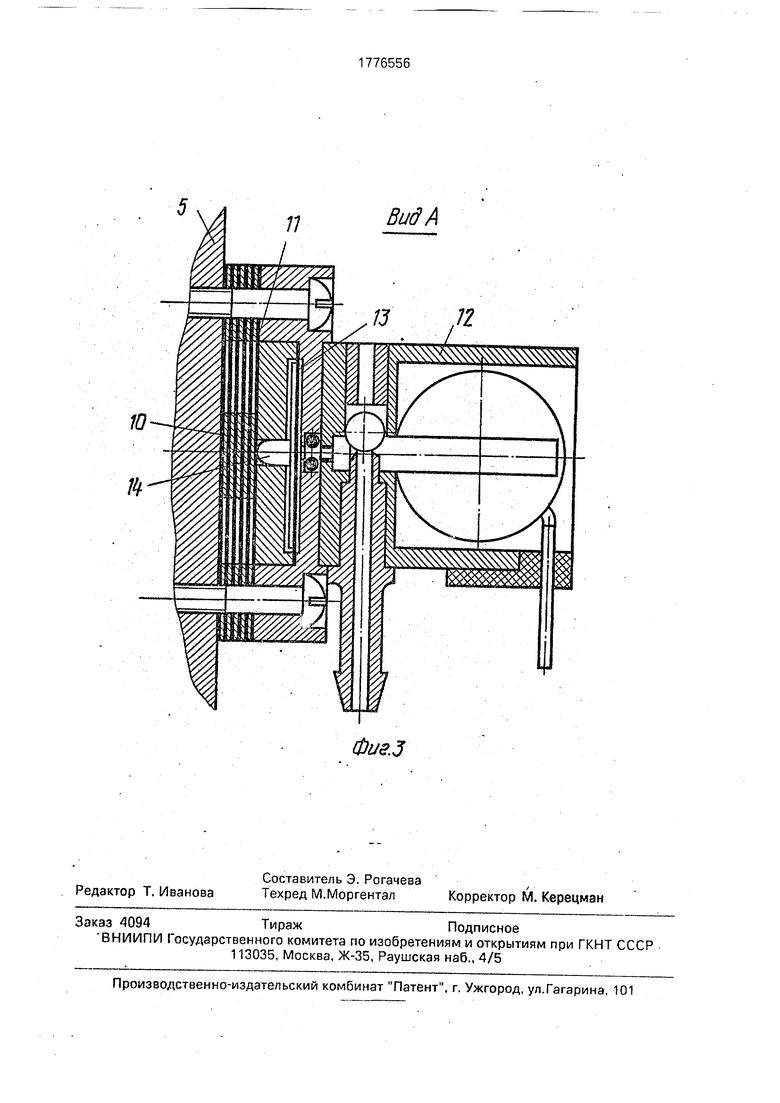
На фиг. 1 представлен модуль манипулятора; на фиг.2 - то же; на фиг.З - тормозная головка.
5Модуль манипулятора (см. фиг.1 и 2) содержит пневмопривод 1, шток которого посредством пластин 2 и 9 жестко связан с направляющими 3 и 4, на которых также установлена каретка 5 с возможностью от0 носительного перемещения и жестко связанная с пневмоприводом. На каретке закреплены две тормозные головки 6 и 7. Упругий элемент 10 закреплен между пластинами 2 и 9 с помощью двух винтов 8 с
5 возможностью регулирования степени его натяжения и выполнен в виде набора плоских лент 10 (фиг.З), между которыми расположены фрикционные вставки 11, жесткие в направлении перемещения штока пневмо0 цилиндра 1. Тормозные головки состоят из корпуса, элекропневмопреобразователя 12, мембраны 13 с жестким центром и сферическим толкателем 14, имеющим возможность контактирования с упругими элементами 10
5 через вставки 11. К пластинам 2 и 9 закреплена линейка оптоэлектронного датчика перемещения 15, корпус которого связан с кареткой 5.
Модуль манипулятора работает следую0 щим образом. Допустим, что шток пневмопривода с направляющими и упругим элементом находятся в крайнем левом положении и их необходимо переместить слева направо на заданную величину. Для этого в
5 левую полость пневмоцилиндра пневмопривода 1 подается давление, в результате за счет усилия, развиваемого пневмоцилинд- ром, осуществляется быстрое перемещение. При подходе к точке позиционирования подается давление с помощмп лектропневмопреобразователя в надмембранную полость тормозной головки 7, толкатель которой сжимает фрикционные вставки 11, осуществляя торможение. Для дальнейшего точного перемещения срабатывает тормоз- ная головка 6, а затем головка 7 отпускает. В результате этого осуществляется перемещение на один шаг, равный величине упругой деформации плоских лент 10 между тормозными головками. Для совершения последующих шагов необходимо, чтобы срабатывала головка 7, отпускала и срабатывала головка 6 и затем вновь отпускала головка 7. Процесс позиционирования прекращается когда расстояние между текущей координатой и заданной станет меньше величины шага. В этом случае осуществляется фиксирование упругого элемента обеими тормозными головками.
При проскакивании точки позициони- рования на стадии быстрого перемещения происходит пошаговое перемещение в обратном направлении.
Устройство обладает следующими преимуществами, высоким быстродействием и
широким диапазоном регулирования ско рости. что обусловлено малым объемом пневматических камер, и практически нулевым ходом штоков тормозных головок, а также возможностью регулирования величины шага перемещения за счет изменения расстояния L между тормозными головками и степени натяжения упругого элемента.
Формула изобретения Модуль манипулятора, содержащий пневмопривод, шток которого жестко связан с направляющими, и упругий элемент, отличающийся тем, что, с целью расширения функциональных возможностей и упрощения конструкции, он снабжен двумя электропневмопреобразователями и двумя тормозными колодками, имеющими каждая фрикционные вставки и мембрану, а упругий элемент связан с направляющей и выполнен в виде набора плоских лент, между которыми расположены фрикционные вставки тормозных головок, а мембраны этих головок связаны с соответствующими эл ектроп невмопреобразовател я м и.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный робот | 1986 |
|
SU1355477A1 |
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| Устройство для резки заготовок на кольца | 1990 |
|
SU1736717A1 |
| Тормоз кривошипного пресса | 1973 |
|
SU472024A1 |
| Устройство для перемотки нитевид-НОгО МАТЕРиАлА | 1979 |
|
SU848461A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| ТОРМОЗНОЕ УСТРОЙСТВО | 2003 |
|
RU2253054C2 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Пневматический привод тормозов автопоезда | 1984 |
|
SU1220977A2 |
Использование: в машиностроении, в частности в промышленных роботах в качестве привода. Шток посредством пластин 2 и 9 жестко связан с направляющими 3 и 4, по которым перемещается каретка 5, на которой закреплен пневмопривод, тормозные головки 6 и 7 и датчик обратной связи. Упругий элемент 10 закреплен между пластинами 2 и 9 и выполнен в виде набора плоских лент, между которыми расположены фрикционные вставки, неподвижные в направлении оси перемещения штока пневмоцилиндра. Тормозные головки выполнены в виде электропневмопреобразо- вателя, состоящего из мембраны и толкателя, имеющего возможность контактировать с упругими элементами. 3 ил.
S///// //
Вид А
ФизЗ
| Ямпольский Л.С | |||
| и др | |||
| Промышленная робототехника, Киев, Техника, 1984, с.102, р.5.3-6. |
