со
со
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| Схват манипулятора | 1985 |
|
SU1348168A1 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |


Изобретение относится к робототехнике и может быть использовано при обслуживании тяжелых технологических процессов. Целью изобретения является расширение технологических возможностей и упрощение конструкции. Для этого устройство имеет основание с установленными на нем опорными звеньями, промежуточные звенья и корпус механической руки, на котором подвижно установлена механическая рука, а также приводы перемещения руки с гидродвигателями и систему управления, включающую блоки управления, записи-считывания и устройство коммутации. Корпус механической руки соединен с опорными звеньями и основанием четырьмя шарнирами, состоящими из пар пятого и четвертого классов, образованных опорными звеньями, промежуточными звеньями и корпусом, а также дугообразными скобами с пазами, в которые входят опорные звенья. 1 з.п.ф-лы, 10 ил.
4:
Изобретение относится к робототехнике и может быть использовано при обслуживании тяжелых и монотонных технологических процессов.
Цель изобретения - расширение технологических возможностей и упрощение конструкции.
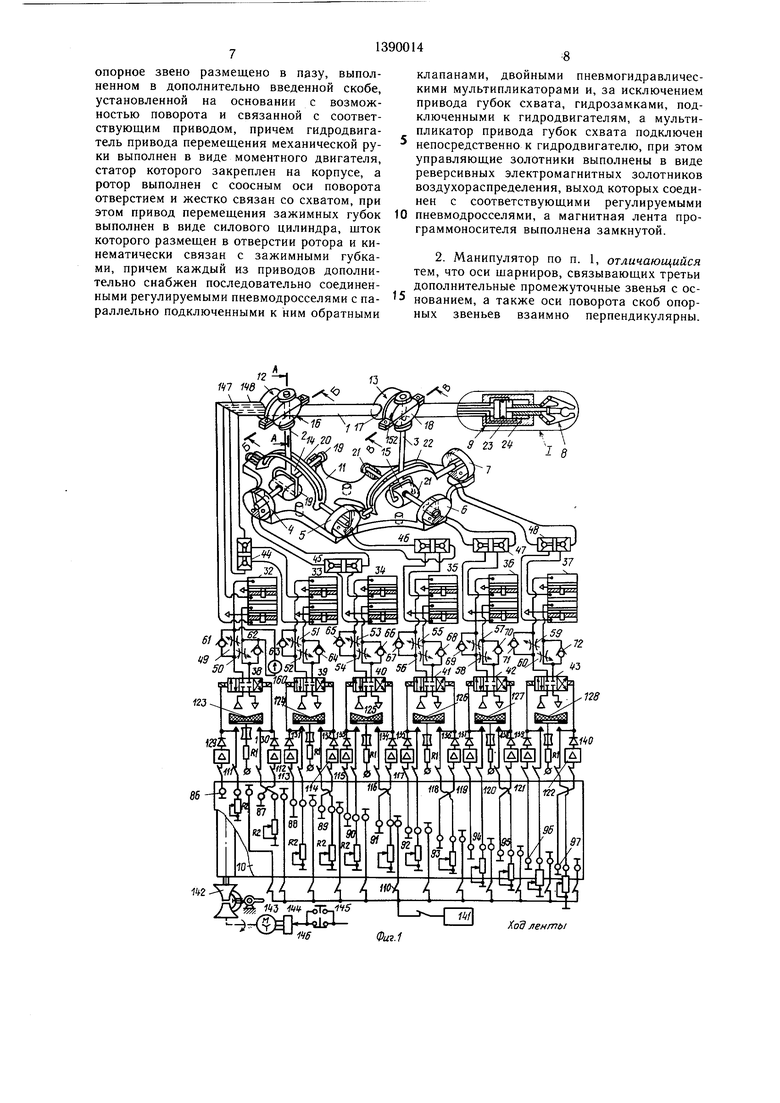
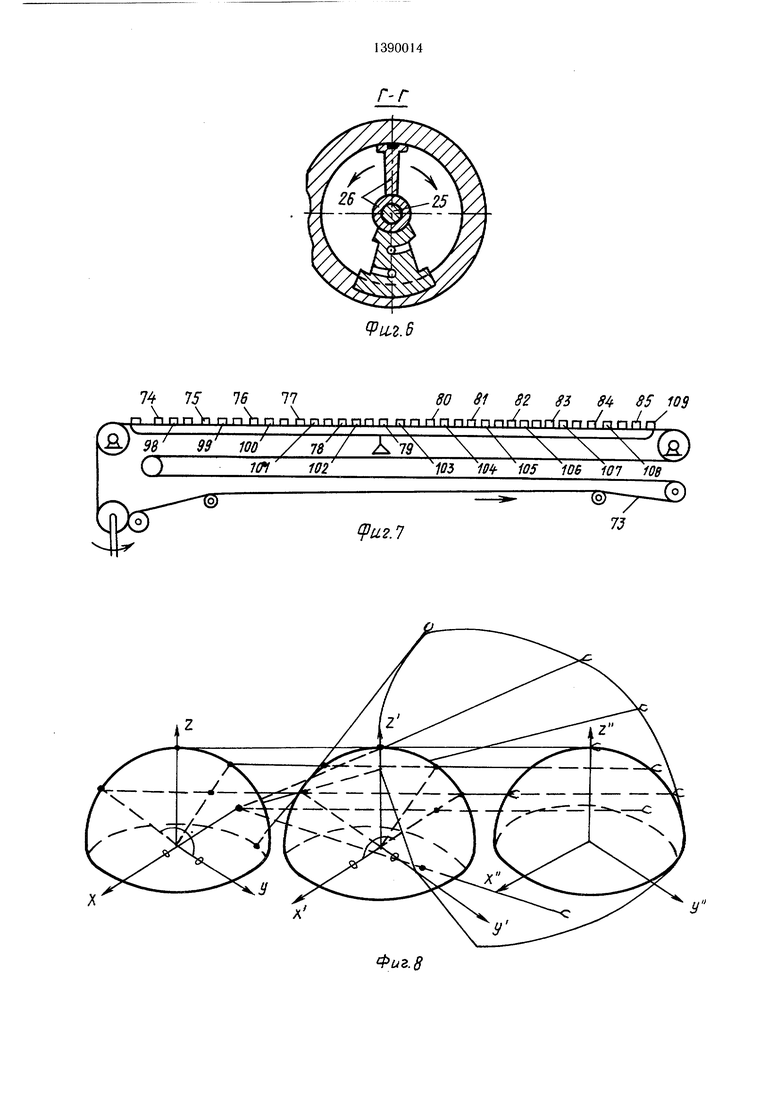
На фиг. 1 изображена схема автоматического манипулятора с программным управлением; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - узел I на фиг. 1; на фиг. 6 - сечение Г-Г на фиг. 5; на фиг. 7 - блок записи- считывания; на фиг. 8 и 9 - положения манипулятора и описываемые схватом рабочие траектории; на фиг. 10 - результирующая зона обслуживания схватом манипулятора.
Автоматический манипулятор содержит корпус 1, связанный с опорными звеньями 2 и 3, приводимыми в движение приводами 4-7 с двигателями механическую руку со схватом 8 и приводом 9, блок 10 записи-считывания, основание 11.
Корпус 1 и звенья 2 и 3 соединены между собой и основанием 11 четырьмя составными шарнирами 12-15. Шарнир 12 образован двумя парами пятого класса (фиг. 1, 2 и 4), из них одна образована корпусом 1 руки и промежуточным звеном 16, другая пара пятого класса образована между промежуточным звеном 16 и опорным звеном 2. Второй составной шарнир 13 выполнен из трех кинематических пар (фиг. 1 и 3), одна из которых - пара четвертого класса - образована между корпусом 1 руки и дополнительным промежуточным звеном 17, вторая пара пятого класса образована между вторым дополнительным промежуточным звеном 18 и опорным звеном 3. третья кинематическая пара пятого класса шарнира 13 образована между дополнительными промежуточными звеньями 17 и 18. Третий составной шарнир 14 (фиг. 1) образован парой пятого класса между валом 19 двигателя привода 4 и опорным звеном 2 и п арой четвертого класса между опорным звеном 2 и дугообразной скобой 20 с продольной прорезью, через которую проходит опорное звено 2, причем ось вращения дугообразной скобы 20 соединена с аналогичным приводом 5, имеющим двигатель.
Четвертый составной шарнир 15 образован парой пятого класса между валом 21 (фиг. 1) двигателя и вторым опорным звеном 3, которое образует пару четвертого класса с второй дугообразной скобой 22 с прорезью, через которую проходит второе опорное звено 3, причем ось вращения дугообразной скобы 22 соединена с аналогичным двигателем 7. Привод 9 схвата механической руки и схвата 8 (фиг. 1) выполнен в виде совмещенных двигателей поступательного 23 и вращательного 24 действий (фиг. 5), при этом щток 25 поступательного двигателя 23 проходит внутри полого вала 26 вращательного двигателя 24, на кон- 5 цах щтока 25 и полого вала расположены по два шарнира 27 и 28 пятого класса, каждая пара этих шарниров соединена с двумя звеньями 29 и зажимными губками 30 механизма схвата 8, соединенных между собой шарниром 31. Привод 9 руки и схвата включает также двойные пневмо- гидравлические мультипликаторы 32-37 (фиг. 1), подключенные к реверсивным электромагнитным золотникам 38-43 воздухо- распределения с одной стороны и к гидродви5 гателям 4-7, 23 и 24 с другой. Параллельно цепи питания поворотных гидродвигателей подключены гидрозамки 44-48, в цепи воздухораспределения на выходе из золотников 38-43 включено по два регулируемых пневмодросселя 49-60 (регулирующие ско0 рость движения руки) с клапанами 61-72.
Блок 10 записи-считывания содержит
(фиг. 1) замкнутую магнитную ленту 73
(фиг. 7), магнитные головки записи 74-85
(фиг. 7), считывания 86-97 (фиг. I) и стира5 ния 98-109 (фиг. 7), коммутируемые устройством коммутации с тумблерами 110. Блок управления содержит усилители 111 - 122, выходы которых подключены к соответствующим клеммам кнопок 123-128. К этим же клеммам подключены электромаг0 ниты золотников 38-43 соответствующего привода. В выходную цепь каждого усилителя 111 -122 включены диоды 129-140. Цепи питания кнопок 123-128 подключены через гасящие резисторы R1 к сети переменного тока, а контакты кнопок подклю5 чены к головкам 74-85, последовательно к которым подключены регулировочные резисторы R2. Магнитные головки 98-109 стирания подключены к генератору 141 стирания. Для регулирования времени рабочего цикла привод магнитной ленты выполнен в
виде вариатора 142 скорости, соединенного с двигателем 143, который управляется контактором 144 от концевых датчиков 145 и 146 цикла.
Для повышения надежности работы при5 вода 9 схвата 8 магистрали 147 энергоносителя подведены к корпусу 1 руки через трубную насадку 148.
Для осуществления сборки составных шарниров 12 и 13 промежуточные звенья 16-18 (фиг. 1), входящие в пары с опор0 ными звеньями 2 и 3, выполнены из двух половин 149-152 (фиг. 1-4) и армированы антифрикционными элементами 153-159. Для контроля усилия на схвате параллельно пневмокамерам мультипликатора 32 поступательного привода схвата подключен
5 дифманометр 160 (фиг. 1). Соединение половин звеньев 16 и 18 осуществляется с помощью крепежных элементов 161 -163.
Манипулятор работает следующим образом.
В режиме ручного управления оператор выключает привод магнитной ленты 73 и все тумблеры (фиг. 7).
В нормальном состоянии золотники 38- 43 закрыты, воздух в пневмокамеры мультипликаторов 32-37 не поступает и давление в них одинаково, следовательно, одинаково давление в гидрокамерах мультипликаторов. Гидрозамки 44-48 закрыты и лопатки гидродвигателей (фиг. 1, 5 и б) неподвижны, опорные звенья 2 и 3, следовательно, жестко зафиксированы и корпус 1 руки жестко зафиксирован в пространстве, так как кинепрямым углом к рассмотренной плоскости (фиг. 8). При этом корпус 1 скользит по втулке и отклоняется по отношению к горизонтальной плоскости под углом к ней отно5 сительно составного шарнира 12, а точнее относительно промежуточного звена 16. При одновременном нажатии кнопок 127 и 128 в ту или иную сторону срабатывают гидродвигатели б и 7 и корпус перемещается в пределах телесного угла полусферы
(фиг. 8), составной щарнир 13 перемещается по сфере с радиусом, равным длине звена 3, при этом корпус 1 перемещается внутри конического телесного угла с вершиной, находящейся в центре составного
матические щарниры 12-15 неподвижны, 5 щарнира 12, при этом корпус 1 одновреибо связаны со звеньями 2 и 3.
При нажатии оператором, например, кнопки 128 вправо срабатывает правый электромагнит золотника 43 и переводит левые каналы золотника в середину. Давменно поворачивается в вертикальной и горизонтальной плоскостях благодаря взаимно перпендикулярным парам пятого класса (фиг. 2 и 4).
После отпускания любой из кнопок 127
ление сжатого воздуха от пневмосети через 20 и 128 золотники 42 и 43 возвращаются в
левый щтуцер золотника 43 и клапан 71 поступает в верхнюю пневмокамеру мультипликатора 37, в результате в соответствующей гидрокамере мультипликатора возсредние положения, пневмокамеры мультипликаторов закрываются, давления на входе гидрозамков 47 и 48 выравниваются и они блокируют камеры гидродвигателей б и 7,
растает давление во столько раз, во сколько 25 опорное звено 3 при этом фиксируется в
торцовая площадь порщня, связанного с верхней пневмокамерой, больще торцовой площади гидроштока, связанного с верхней гидрокамерой мультипликатора 37.
Давление гидросмеси из гидрокамеры поступает на правый щтуцер гидрозамка 48 30 конуса (фиг. 9).
перемещенном положении и корпус 1 также фиксируется. При нажатии кнопок 125 и 126 по сфере перемещается щарнир 12 относительно шарнира 13, при этом корпус 1 перемешается вдоль и поперек первоначального
(фиг. 1) и правый выход последнего открывается, а давление гидросмеси поступает на левый штуцер гидродвигателя 7, при этом последний поворачивает дугообразную скобу 22, а следовательно, опорное звено 3 и составной шарнир 13 относительно неподвижного при этом составного шарнира 12, передвигая при этом корпус 1 руки со схватом вправо (если смотреть со стороны схвата). Гидросмесь из правой камеры
При манипулировании одновременно кнопками 125-128 корпус 1 занимает различные положения и схват 8 располагается внутри некоторой зоны обслуживания внутри сферы (фиг. 10).
35 Для врашения руки со схватом 8 относительно продольной оси корпуса 1 служит кнопка 124, для захвата и отпускания предмета - кнопка 123. При нажатии кнопки 124 поворачивается лопатка поворотного двигателя 24 (фиг. 1) руки схвата 8 (фиг. 5
гидродвигателя 7 переходит в нижнюю гид- .... . , ..... .... „
рокамеру мультипликатора 37, при этом вто- и б) и жестко связанная с ней втулка 26, при рой шток перемещается вверх со связан- этом рука и схват 8 начинают повора- ным с ним поршнем и сжатый воздух из чиваться относительно штока 25, одновре- нижней пневмокамеры мультипликатора 37менно поворачивая его вместе с поршнем
через дроссель 60 и правый (выходной) шту-поступательного привода 23 (фиг. 1 и 5).
цер золотника 43 сбрасывается в атмосферу, д При нажатии на кнопку 123 срабатывает причем скорость выброса зависит от величи-поступательный привод 23, при этом шток 25
ны сопротивления, установленного вручную на дросселе 60. Это меняет скорость движения привода 7, а следовательно, и скорость перемещения схвата 8 в пространстве. При нажатии кнопки 128 влево включается левый электромагнит золотника 43 и происходит реверс привода, опорное звено 3 движется в обратном направлении. При нажатии кнопки 128 движение опорного звена 3 происходит в одной плоскости.
При нажатии кнопки 127 происходит аналогичное движение,только оно происходит в плоскости, ортогонально первой, т. е. под
начинает перемещение относительно втулки 26 в аксиальном направлении и губки 30 начинают поворачиваться относительно щар- ниров 27, 28 и 31, звено 29 поворачи50 вается относительно щарнира 27, направление поворота зависит от направления хода штока 25. Последний, звенья 29, губки 30, связанные шарнирами 27, 28 и 31 и поступательной парой, образуют плоский направляющий четырехзвенный механизм, стойкой кото55 рого является втулка 26.
При одновременном нажатии кнопок 123 и 124 происходит поворот руки со схватом 8, имеющим механизм из звеньев 29, губок 30,
прямым углом к рассмотренной плоскости (фиг. 8). При этом корпус 1 скользит по втулке и отклоняется по отношению к горизонтальной плоскости под углом к ней отно5 сительно составного шарнира 12, а точнее относительно промежуточного звена 16. При одновременном нажатии кнопок 127 и 128 в ту или иную сторону срабатывают гидродвигатели б и 7 и корпус перемещается в пределах телесного угла полусферы
(фиг. 8), составной щарнир 13 перемещается по сфере с радиусом, равным длине звена 3, при этом корпус 1 перемещается внутри конического телесного угла с вершиной, находящейся в центре составного
5 щарнира 12, при этом корпус 1 одновременно поворачивается в вертикальной и горизонтальной плоскостях благодаря взаимно перпендикулярным парам пятого класса (фиг. 2 и 4).
После отпускания любой из кнопок 127
и 128 золотники 42 и 43 возвращаются в
средние положения, пневмокамеры мультипликаторов закрываются, давления на входе гидрозамков 47 и 48 выравниваются и они блокируют камеры гидродвигателей б и 7,
опорное звено 3 при этом фиксируется в
опорное звено 3 при этом фиксируется в
конуса (фиг. 9).
перемещенном положении и корпус 1 также фиксируется. При нажатии кнопок 125 и 126 по сфере перемещается щарнир 12 относительно шарнира 13, при этом корпус 1 перемешается вдоль и поперек первоначального
При манипулировании одновременно кнопками 125-128 корпус 1 занимает различные положения и схват 8 располагается внутри некоторой зоны обслуживания внутри сферы (фиг. 10).
5 Для врашения руки со схватом 8 относительно продольной оси корпуса 1 служит кнопка 124, для захвата и отпускания предмета - кнопка 123. При нажатии кнопки 124 поворачивается лопатка поворотного двигателя 24 (фиг. 1) руки схвата 8 (фиг. 5
.... . , ..... .... „
и б) и жестко связанная с ней втулка 26, при этом рука и схват 8 начинают повора- чиваться относительно штока 25, одновре- менно поворачивая его вместе с поршнем
начинает перемещение относительно втулки 26 в аксиальном направлении и губки 30 начинают поворачиваться относительно щар- ниров 27, 28 и 31, звено 29 поворачивается относительно щарнира 27, направление поворота зависит от направления хода штока 25. Последний, звенья 29, губки 30, связанные шарнирами 27, 28 и 31 и поступательной парой, образуют плоский направляющий четырехзвенный механизм, стойкой которого является втулка 26.
При одновременном нажатии кнопок 123 и 124 происходит поворот руки со схватом 8, имеющим механизм из звеньев 29, губок 30,
86-97 считывания поступают сигиалы на усилители 111 -122, а с них - на электромагниты золотников 38-43.
Порядок и время включения золотников 38-43 соответствует порядку и времени записанной программы, при этом манипулятор повторяет все записанные движения. Концевые датчики 145 и 146 производят включение ленты 73 на определенный цикл отработки программы.
В режиме коррекции программы включают тумблеры записи и во время считывания в случае неточности движения схва- та нажимают ту или иную кнопку, при этом происходит дозапись программы и одновременно с этим дополнительное включение
втулки 26 относительно оси штока и захват предмета губками 30.
В поступательном приводе 23 (фиг. 1) отсутствует гидрозамок, но имеется дифференциальный манометр 160 для контроля усилия на губках 30 в зависимости от веса захватываемого изделия.
Усилие захвата зависит от времени удерживания кнопки 123 в левом положении, при правом ее нажатии губки 30 расходятся на угол, величина которого также 10 зависит от времени удержания кнопки 123 в правом положении.
Для. увеличения или уменьшения, скорости движения схвата 8 и приводов 4-
7 осуществляется регулировка переменных „
дросселей 49-60, которые изменяют время электромагнитов золотников, и скорость выхода воздуха из пневмока-Кроме того, в случае сокращения замер мультипликаторов 32-37, что приво- писи сигнала может быть включен кратко- дит к изменению скоростей перемещения со- временно тот или иной тумблер при вклю- ставных шарниров 12 и 13 при различных ченном генераторе 141, это вносит также нагрузках, действующих на эти шарниры. 20 коррекцию в программу. Далее коррекция
Запись программы работы производят может быть внесена по скорости отработки следующим образом.дросселями 49-60 и изменением положения
При цикловом движении опорные звенья рукоятки вариатора 142. 2 и 3 получают строго определенные
последовательные движения. При одновре-Формула изобретения
менном включении двигателей 4 и 6 в одну 25
сторону схват движется по окружности в1. Автоматический манипулятор с проодной плоскости, при включении двигателей 5 и 7 в одну сторону схват движется по окружности (фиг. 8) в перпендикулярной плоскости.
Для цикловых движений кнопками 125- 128 набирают определенную переключательную функцию, например 1110 (правое нажатие кнопок 125-127 означают единицы, кнопка 128 не нажата и означает нуль).
Затем включают двигатель 143, тумблеры 110 и генератор 141 стирания - производится очистка ленты 73. После одного цикла обращения ленты 73 генератор 141
30
35
граммным управлением, содержащий основание, установленные на нем и соединенные между собой вращательными парами опорное звено, промежуточное звено и корпус, на котором подвижно установлена механическая рука и схват с зажимными губками, а также приводы перемещения корпуса, механической руки и губок схвата, каждый из которых включает в себя гидродвигатель и управляющий золотник, связанный с системой управления, выполненной в виде отдельных каналов по числу управляемых координат манипулятора и
выключают. Рукояткой вариатора 142 уста-включающей в себя соответствующим обра- навливают время цикла технологическогозом связанные между собой блок управ- процесса, равное времени обращения маг-40 ления, устройство коммутации и блок за- нитной ленты 73.писи-считывания с программоносителем на Выключают тумблеры в цепях усилите-магнитной ленте, имеющий регулируемую лей 112-122 и включают тумблеры в цепяхскорость движения программоносителя, от- магнитных головок 74-85. Далее производятличающийся тем, что, с целью расшире- выполнение программы кнопками 123-128,ния технологических возможностей и упро- при нажатии которых с клемм кнопок по- щения конструкции, он снабжен вторым ступает напряжение на головки 74-85 запи-опорным звеном, кинематически связанным с си: происходит запись программы, обус-корпусом посредством двух дополнительных ловленная комбинацией переключательныхпромежуточных звеньев, одно из которых функций и временем подключения сигна-соединено вращательными парами соответ- лов к головкам. Одновременно с этим проис-. ственно с опорным звеном и с другим доходит срабатывание приводов манипулятора.полнительным звеном, а последнее связано Запись программы должна быть выполне-с помощью цилиндрической пары с корпусом, причем каждое из опорных звеньев соединено с основанием посредством третье:го дополнительного промежуточного звена, свяВ режиме считывания программы вы-55 занного с опорным звеном вращательной
ключают двигатель 143 и тумблеры в цепяхпарой и установленного на основании с
записи, включают тумблеры в цепях считы-возможностью поворота с помощью соотвания, двигатель 143, при этом с головокветствующего привода, при этом каждое
на за время цикла обращения магнитной ленты, равного времени цикла технологического процесса манипулирования.
86-97 считывания поступают сигиалы на усилители 111 -122, а с них - на электромагниты золотников 38-43.
Порядок и время включения золотников 38-43 соответствует порядку и времени записанной программы, при этом манипулятор повторяет все записанные движения. Концевые датчики 145 и 146 производят включение ленты 73 на определенный цикл отработки программы.
В режиме коррекции программы включают тумблеры записи и во время считывания в случае неточности движения схва- та нажимают ту или иную кнопку, при этом происходит дозапись программы и одновременно с этим дополнительное включение
„
электромагнитов золотников, Кроме того, в случае сокращения за
граммным управлением, содержащий основание, установленные на нем и соединенные между собой вращательными парами опорное звено, промежуточное звено и корпус, на котором подвижно установлена механическая рука и схват с зажимными губками, а также приводы перемещения корпуса, механической руки и губок схвата, каждый из которых включает в себя гидродвигатель и управляющий золотник, связанный с системой управления, выполненной в виде отдельных каналов по числу управляемых координат манипулятора и
включающей в себя соответствующим обра- зом связанные между собой блок управ- ления, устройство коммутации и блок за- писи-считывания с программоносителем на магнитной ленте, имеющий регулируемую скорость движения программоносителя, от- личающийся тем, что, с целью расшире- ния технологических возможностей и упро- щения конструкции, он снабжен вторым опорным звеном, кинематически связанным с корпусом посредством двух дополнительных промежуточных звеньев, одно из которых соединено вращательными парами соответ- ственно с опорным звеном и с другим дополнительным звеном, а последнее связано с помощью цилиндрической пары с корпусом, причем каждое из опорных звеньев соединено с основанием посредством третье:го дополнительного промежуточного звена, свяопорное звено размещено в пазу, выполненном в дополнительно введенной скобе, установленной на основании с возможностью поворота и связанной с соответствующим приводом, причем гидродвигатель привода перемещения механической руки выполнен в виде моментного двигателя, статор которого закреплен на корпусе, а ротор выполнен с соосным осн поворота отверстием и жестко связан со схватом, при этом привод перемещения зажимных губок выполнен в виде силового цилиндра, щток которого размещен в отверстии ротора и кинематически связан с зажимными губками, причем каждый из приводов дополнительно снабжен последовательно соединенными регулируемыми пневмодросселями с параллельно подключенными к ним обратными
т т
I ут. Tfj w l r-oio-i
клапанами, двойными пневмогидравличес- кими мультипликаторами и, за исключением привода губок схвата, гидрозамками, подключенными к гидродвигателям, а мультипликатор привода губок схвата подключен непосредственно к гидродвигателю, при этом управляющие золотники выполнены в виде реверсивных электромагнитных золотников воздухораспределения, выход которых соединен с соответствующими регулируемыми 10 пневмодросселями, а магнитная лента программоносителя выполнена замкнутой.
Фиг.1
Ход лен mill
156ГУ ОСС ЧХ ЧЧ Сч с 44 K//yVO-/
IVxkU ч k ч k. k. LL YA
fPu. 5
5-f
1 Л
X m
.5
h
31
30
74 75 16 7780 81 82 85 8 85 103
nnnVi nnnnnr-itnnnmnn nnnnnrin п Гт п п п п п пг га п п гг
и-г.Ь
Фиг. 8
| Патон Б | |||
| Е | |||
| и др | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
