Фиг.З
Изобретение относится к транспорту с электрическим приводом главным образом с гусеничными движителями.
Цель изобретения - повышение надежности и снижение массогабаритных показателей.
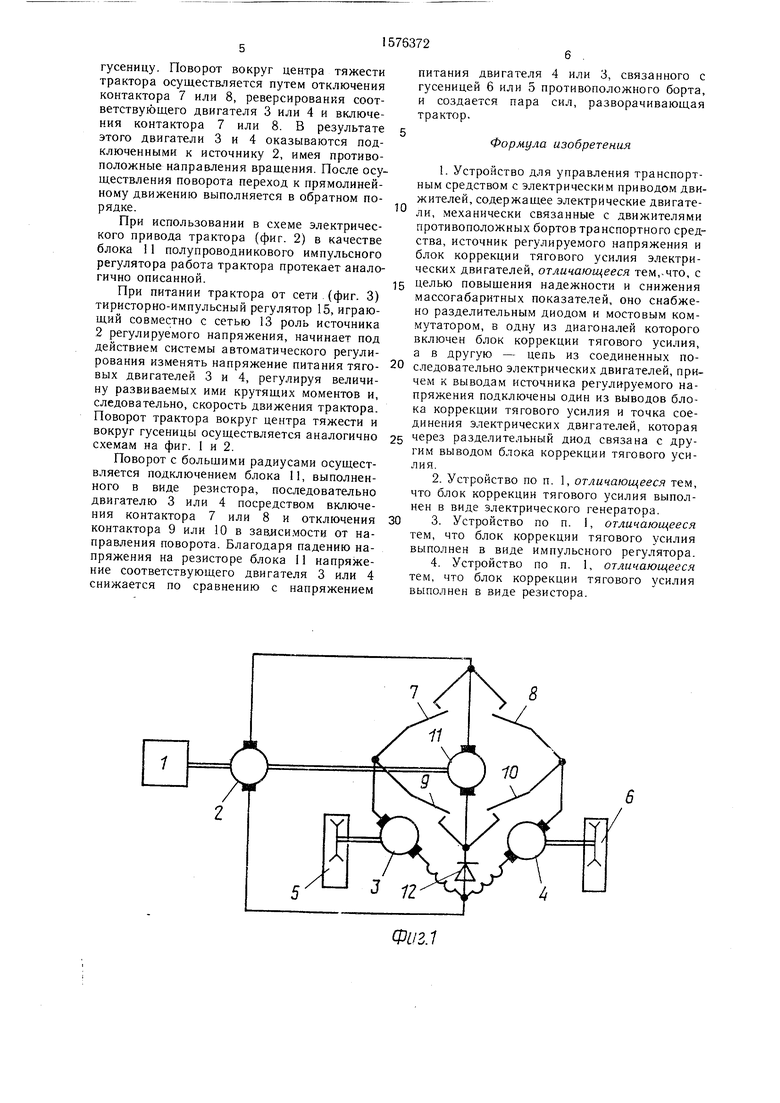
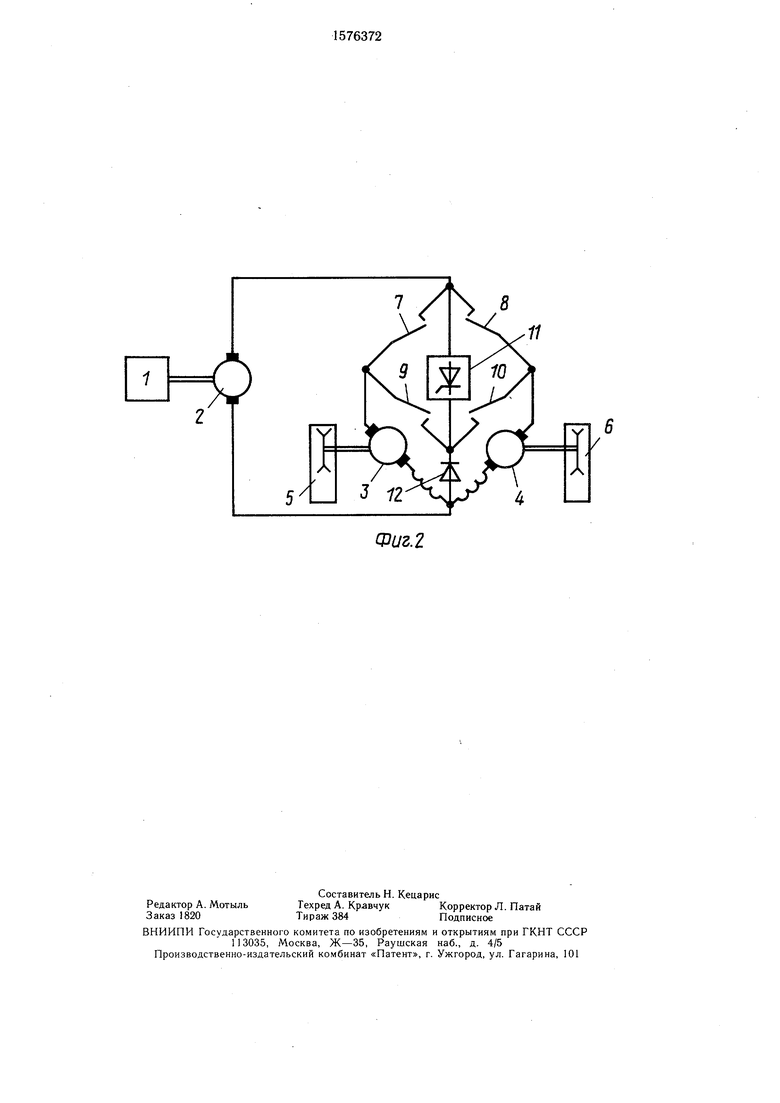
На фиг. 1-3 представлены принципиальные схемы электрического тягового привода транспортного средства с выполнением блока коррекции тягового усилителя в виде соответственно генератора, импульсного регулятора и резистора.
Устройство для управления транспортным средством (фиг. 1) содержит соединенный с тепловым двигателем 1 источник 2 регулируемого напряжения, представляющий собой генератор и связанные с ним посредством мостового коммутатора тяговые электрические двигатели 3 и 4, каждый из которых соединен с движителем (гусеницами) 5 и 6 противоположных бористочнику 2 регулируемого напряжения непосредственно, а двигатель 3 оказывается подключенным к соединенным последовательно генераторам 2 и 11. Регулируя напряжение генератора 11, меняют напряжение
5 питания на двигателе 3, в результате чего изменяются ток якоря двигателя 3 и крутящий момент на его валу, а на гусеницах 5 и 6 создается пара сил, разворачивающая трактор. Регулируя напряжение
10 на генераторе блока 11 коррекции тягового усилия, меняют радиус поворота, трактора. Поскольку процесс этот происходит при неизменном напряжении источника 2, снижение тока якоря двигателя 3 сопровождается увеличением тока якоря двигателя 4, что увеличивает разворачивающий момент трактора. Снижение тока двигателя 3 при подключении последовательно к нему генератора блока 11 происходит при встречном включении источника 2 и генератора блока 11
15
тов транспортного средства. Мостовой комму- 20 коррекции тягового усилия, возможном в любом режиме работы трактора. Генератор блока 11 работает при этом в режиме двигателя, возвращая энергию на вал теплового двигателя 1 и источника 2, что способствует устойчивости процесса регулирования.
татор состоит из четырех коммутационных
элементов - контакторов 7-10. В диагональ мостового коммутатора включен блок 11 коррекции тягового усилия, представляющий собой соединенный механически с тепловым двигателем 1 генератор. Точка соединения двигателей 3 и 4 связана с мостовым коммутатором через разделительный диод 12.
Блок 11 коррекции тягового усилия выполнен в виде полупроводникового импульсного регулятора (фиг. 2).
В качестве источника 2 регулируемого напряжения использована питающая сеть 13, с которой посредством токосъемного устройства 14 связан тиристорно-импульсный регулятор 15 напряжения, а в качестве блобом режиме работы трактора. Генератор блока 11 работает при этом в режиме двигателя, возвращая энергию на вал теплового двигателя 1 и источника 2, что способствует устойчивости процесса регулирования.
25 Возможно и согласное включение источника 2 и генератора блока 11, при котором напряжение питания двигателя 3 увеличивается, а двигателя 4 снижается, следовательно, поворот трактора происходит в про30 тивоположном направлении. Этот режим возможен, но нежелателен на максимальных скоростях движения, когда напряжение источника 2 максимально, но смена этих двух режимов путем реверсирования обмотки возбуждения генератора позволяет осущестка И коррекции тягового усилия исполь- „,- влять маневрирование без переключения кон- зуется резистор (фиг. 3). - - --Устройство для управления транспортным средством работает следующим образом.
После включения и разгона до номинальной частоты вращения теплового двигатакторов мостового коммутатора, что способствует повышению их долговечности.
Возвращение трактора к прямолинейному движению осуществляется отключением контактора 9 и включением контактора 7, что
теля 1 и подачи возбуждения на источ- 40 возвращает схему в первоначальное состояник 2 регулируемого напряжения включаются контакторы 7 и 8 мостового коммутатора, тяговые электродвигатели 3 и 4 подключаются к источнику 2 регулируемого напряжения и начинают развивать тяговый крутящий момент, а на связанных с ними гусеницах 5 и 6 появляется тяговое усилие, в результате чего транспортное средство, например трактор, приходит в движение. Регулирование напряжения источника 2 обес45
ние и ставит двигатели 3 и 4 в одинаковые условия питания.
Поворот в противоположном направлении осуществляется включением контактора 10 и отключением контактора 8, в результате чего двигатель 3 остается подключенным к источнику 2 непосредственно, а двигатель 4 - к последовательно соединенным источнику 2 и генератору блока 11 коррекции тягового усилия. Радиус поворота тактора при таком
источнику 2 регулируемого напряжения непосредственно, а двигатель 3 оказывается подключенным к соединенным последовательно генераторам 2 и 11. Регулируя напряжение генератора 11, меняют напряжение
питания на двигателе 3, в результате чего изменяются ток якоря двигателя 3 и крутящий момент на его валу, а на гусеницах 5 и 6 создается пара сил, разворачивающая трактор. Регулируя напряжение
на генераторе блока 11 коррекции тягового усилия, меняют радиус поворота, трактора. Поскольку процесс этот происходит при неизменном напряжении источника 2, снижение тока якоря двигателя 3 сопровождается увеличением тока якоря двигателя 4, что увеличивает разворачивающий момент трактора. Снижение тока двигателя 3 при подключении последовательно к нему генератора блока 11 происходит при встречном включении источника 2 и генератора блока 11
коррекции тягового усилия, возможном в любом режиме работы трактора. Генератор блока 11 работает при этом в режиме двигателя, возвращая энергию на вал теплового двигателя 1 и источника 2, что способствует устойчивости процесса регулирования.
Возможно и согласное включение источника 2 и генератора блока 11, при котором напряжение питания двигателя 3 увеличивается, а двигателя 4 снижается, следовательно, поворот трактора происходит в противоположном направлении. Этот режим возможен, но нежелателен на максимальных скоростях движения, когда напряжение источника 2 максимально, но смена этих двух режимов путем реверсирования обмотки возбуждения генератора позволяет осуществлять маневрирование без переключения кон- - - --такторов мостового коммутатора, что способствует повышению их долговечности.
Возвращение трактора к прямолинейному движению осуществляется отключением контактора 9 и включением контактора 7, что
возвращает схему в первоначальное состоя5
ние и ставит двигатели 3 и 4 в одинаковые условия питания.
Поворот в противоположном направлении осуществляется включением контактора 10 и отключением контактора 8, в результате чего двигатель 3 остается подключенным к источнику 2 непосредственно, а двигатель 4 - к последовательно соединенным источнику 2 и генератору блока 11 коррекции тягового усилия. Радиус поворота тактора при таком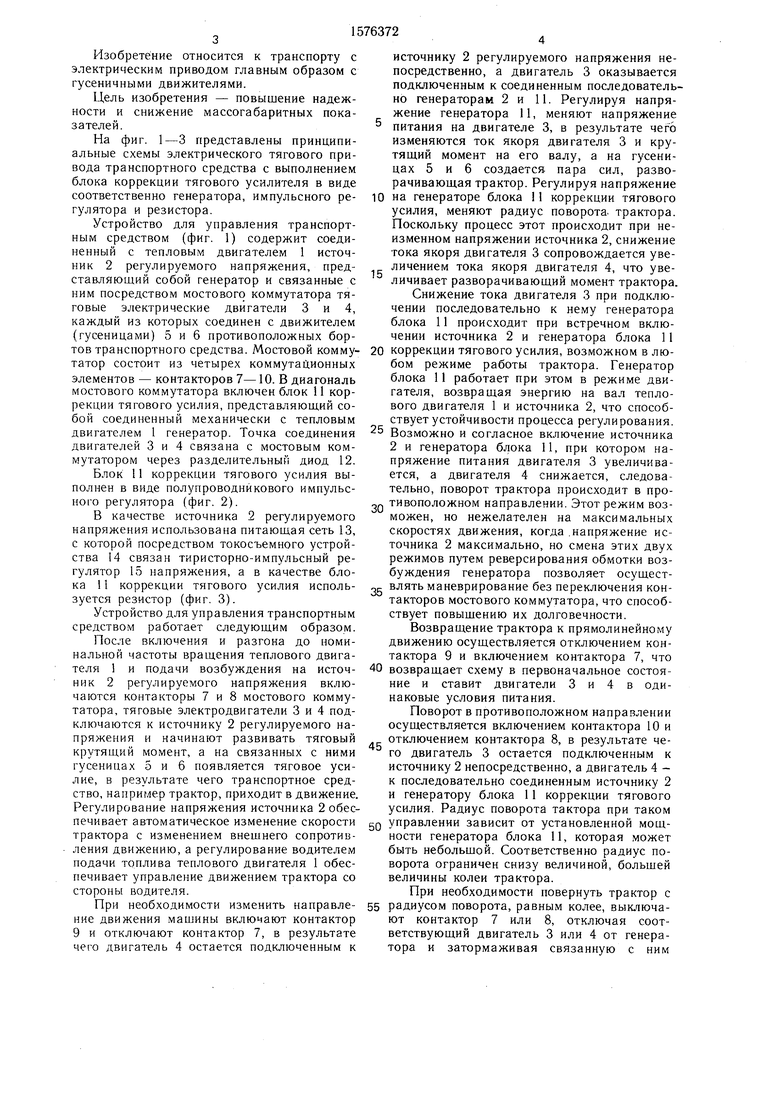
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| Устройство для регулирования скорости электроподвижного состава | 1985 |
|
SU1232519A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| Электропривод постоянного тока | 1977 |
|
SU700907A1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2540679C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ НА ГУСЕНИЧНОМ ХОДУ | 2005 |
|
RU2279370C1 |
| Автономный тяговый электропривод | 1988 |
|
SU1564016A1 |
Изобретение относится к транспорту преимущественно с индивидуальным приводом движителей разных бортов от собственных электрических двигателей. Цель изобретения - повышение надежности и снижение массогабаритных показателей. Устройство содержит мостовой коммутатор на контакторах 7-10 с включенными в одну из его диагоналей блоком 11 коррекции тягового усилия, а в другую - тяговыми электродвигателями 3 и 4. 3 з.п. ф-лы, 3 ил.
печивает автоматическое изменение скорости управлении зависит от установленной мощтрактора с изменением внешнего сопротивления движению, а регулирование водителем подачи топлива теплового двигателя 1 обеспечивает управление движением трактора со стороны водителя.
ности генератора блока 11, которая может быть небольшой. Соответственно радиус поворота ограничен снизу величиной, большей величины колеи трактора.
При необходимости повернуть трактор с
При необходимости изменить направле-55 радиусом поворота, равным колее, выключание движения машины включают контакторют контактор 7 или 8, отключая соот9 и отключают контактор 7, в результатеветствующий двигатель 3 или 4 от генерачего двигатель 4 остается подключенным ктора и затормаживая связанную с ним
управлении зависит от установленной мощности генератора блока 11, которая может быть небольшой. Соответственно радиус поворота ограничен снизу величиной, большей величины колеи трактора.
При необходимости повернуть трактор с
гусеницу. Поворот вокруг центра тяжести трактора осуществляется путем отключения контактора 7 или 8, реверсирования соответствующего двигателя 3 или 4 и включения контактора 7 или 8. В результате этого двигатели 3 и 4 оказываются подключенными к источнику 2, имея противоположные направления вращения. После осуществления поворота переход к прямолинейному движению выполняется в обратном порядке.
При использовании в схеме электрического привода трактора (фиг. 2) в качестве блока 11 полупроводникового импульсного регулятора работа трактора протекает аналогично описанной.
При питании трактора от сети (фиг. 3) тиристорно-импульсный регулятор 15, играющий совместно с сетью 13 роль источника 2 регулируемого напряжения, начинает под действием системы автоматического регулирования изменять напряжение питания тяговых двигателей 3 и 4, регулируя величину развиваемых ими крутящих моментов и, следовательно, скорость движения трактора. Поворот трактора вокруг центра тяжести и
вокруг гусеницы осуществляется аналогично 25 чеРез разделительный диод связана с друсхемам на фиг. 1 и 2.
Поворот с большими радиусами осуществляется подключением блока 11, выполненного в виде резистора, последовательно двигателю 3 или 4 посредством включения контактора 7 или 8 и отключения контактора 9 или 10 в завлсимости от направления поворота. Благодаря падению напряжения на резисторе блока 11 напряжение соответствующего двигателя 3 или 4 снижается по сравнению с напряжением
гим выводом блока коррекции тягового усилия.
0
питания двигателя 4 или 3, связанного с гусеницей 6 или 5 противоположного борта, и создается пара сил, разворачивающая трактор
Формула изобретения
5
чеРез разделительный диод связана с другим выводом блока коррекции тягового усилия.
8
Фиг.1
8
11
Фиг.2
| Устройство для управления вращением антенны и разверткой электронно-лучевого индикатора | 1952 |
|
SU102019A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
