Изобретение относится к транспортному машиностроению, в частности к устройствам для управления шарнирно сочлененными машинами.
Цель изобретения - повышение эффективности управления и повышение производительности транспортного средства.
На чертеже представлена принципиальная схема предлагаемого устройства.
Устройство управления механизмами поворота и тормозами состоит из рулевого колеса 1, установленного на рулевом валу 2, на конце которого жестко закреплен поводок 3, служащий для привода рычагов 4 и 5 вала рулевого колеса, свободно посаженных на рулевом валу 2 и соединенных гибкими тягами (тросами) 6 и 7, проходящими в направляющих оболочках, с рычагами 8 и 9 мостика 10 управления, связанными с механизмами разрыва потока мощности правого и левого бортов. К рычагам 11 и 12 мостика 10 управления подсоединены аналогичные гибкие тяги с тросами 13 и 14, также проходящими в направляющих оболочках, которые вторым концом соединены с рычагами затяжки тормозов правого 15 и левого 16 бортов энергетического модуля. С рычагами 11 и 12 связаны гибкие тяги (тросы) 17 и 18, также проходящие в направляющих оболочках, которые вторым концом соединены с соответствующим основным рычагом 19 или 20 одинарных тормозных кранов 21 и 22.
Впускные штуцера 23 и 24 одинарных тормозных кранов 21 и 22 соединены с ресивером 25, а выпускные штуцера 26 и 27 через гибкие пневмопроводы 28 и 29 связаны с тормозными камерами 30 и 31 тормозов 32 и 33 транспортного модуля.
Рычаги 4 и 5, установленные на рулевом валу, соединены между собой тросом 34, в средней части у которого размещен подвижный ролик 35, закрепленный на оси рычага, связанного через систему тяг с педалью 36 тормозов
Устройство работает следующим образом.
Во время прямолинейного движения гусеничного транспортного средства педаль 36 тормозов отпущена, а рычаги 4 и 5 устанавливаются у поводка 3, расположенного в нейтральном положении. Трос 34 находится в ручье ролика 35. При повороте транспортного средства вращением рулевого колеса 1 в сторону поворота поворачивается поводок 3 и приводится в движение рычаг 4 или 5, который натягивает трос 6 или 7 и проворачивает рычаг 8 или 9 мостика 10 управления, разрывая поток мощности соответствующей ветви. Дальнейший поворот рулевого колеса приводит к выбиранию зазоров и последующему повороту рычагов 11 или 12, воздействующих через трос 13 или 14 на рычаги затяжки тормозов 15 или 16 правого или левого бортов энергетического модуля. Одновременно с этим этот же рычаг 11 или 12 через трос 17 или 18 воздействует на основной рычаг 19 или 20 одинарного тормозного крана 21 или
5 22, обеспечивая подачу сжатого воздуха от ресивера 25 через впускной штуцер 23 или 24, выпускной штуцер 26 или 27, гибкий пневмопровод 28 или 29 к тормозной камере 30 или 31. Если давление воздуха в тормозной магистрали транспортного средства превышает значение, пропорциональное нажатию на тормозную педаль, подача сжатого воздуха к тормозным камерам прекращается. Регулируя свободный ход основных рычагов 19 и 20, можно регулировать ран5 нее, позднее или нормальное торможение транспортного модуля.
Для остановки машины водитель нажатием на педаль 36 воздействует через ролик 35, трос 34 на рычаги 4 и 5 вала рулевого
0 колеса, которые, в свою очередь, через тросы 6 и 7 перемещают рычаги 8 и 9, разрывающие поток мощности.
Дальнейшее движение рычагов передается на рычаги 11 и 12 мостика 10 управления и от них, через тросы 13 и 14, на рычаги
5 затяжки тормозов правого 15 и левого 16 бортов энергетического модуля. Одновременно движение рычагов 11 и 12 передается через тросы 17 и 18 на одинарные тормозные краны 21 и 22, от которых поступает воздух к тормозным камерам тормо0 зов 32 и 33 транспортного модуля. Следовательно, торможение энергетического и транспортного модулей происходит параллельно и синхронно.
Предлагаемое устройство обеспечивает синхронное управление энергетическим и
5 транспортным модулями путем одновременного подтормаживания соответствующих одноименных бортов этих модулей. Кроме этого, оно обеспечивает только синхронное торможение обоих модулей при нажатии на пе0 даль тормоза.
Формула изобретения
Устройство управления механизмами поворота и тормозами шарнирпо сочлененно5 го транспортного средства, состоящего из транспортного модуля и энергетического, содержащего силовую передачу с разделением потока мощности, рулевую колонку с рулевым колесом, рычаги вала рулевого колеса, свободно размещенные на рулевом валу и кинематически связанные с рычагами валов управления правым и левым механизмами разрыва потока мощности, рычаги затяжки тормозов правого и левого боргов, связанные с соответствующими валами управления, ресивер, педаль тормоза, при этом транспортный и энергетический модули снабжены тормозными механизмами, связанными с тормозными камерами, отличающееся тем, что, с целью повышения эффективнос0
5 15764096
ти управления и повышения производитель-тяжки тормозов правого и левого бортов,
ности транспортного средства, транспортныйпри этом входные магистрали тормозных кра:
модуль снабжен ведущим мостом, кинема-нов сообщены с ресивером, а выходные - с
тически связанным с силовой передачей энер-тормозными камерами соответствующих боргетического модуля, энергетический модуль5 тов ведущего моста транспортного модуля,
снабжен двумя дополнительными тормоз-при этом тормозная педаль кинематически
ными кранами, рычаги управления которымисвязана с упомянутыми рычагами вала
связаны с соответствующими рычагами за-рулевого колеса.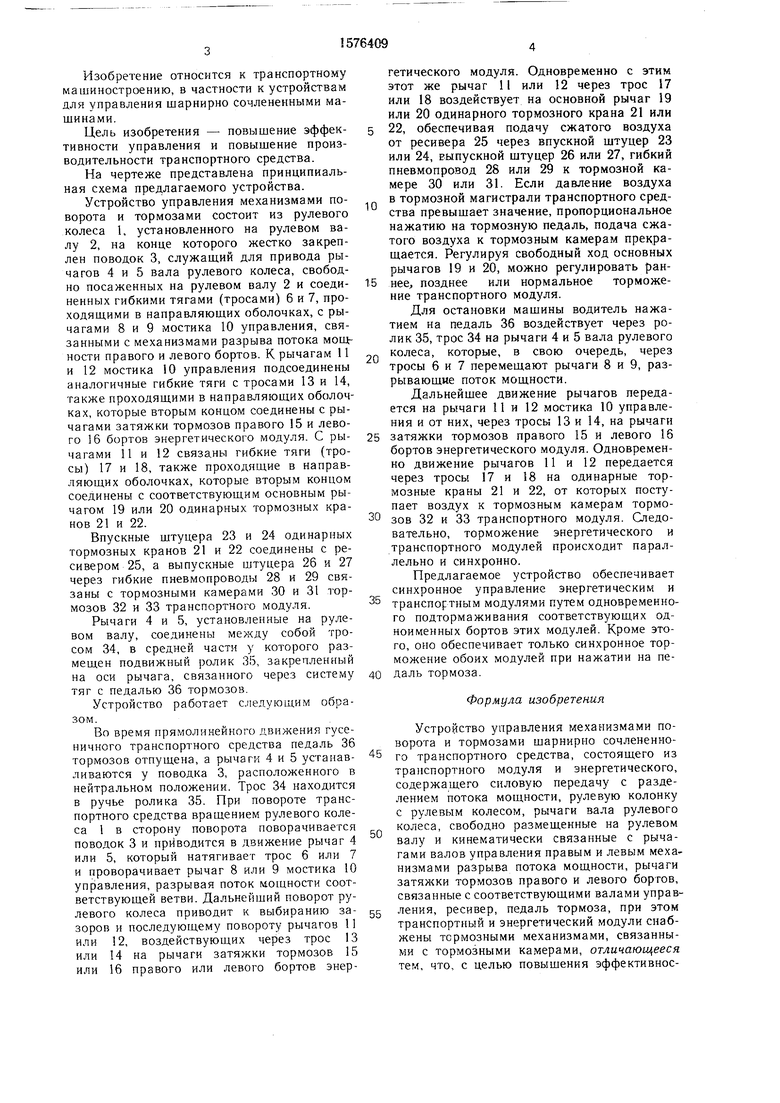
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления механизмами поворота и тормозами гусеничной машины с разделением потока мощности | 1982 |
|
SU1063681A1 |
| Система управления колесным транспортным средством | 1985 |
|
SU1316900A1 |
| Тормозная система транспортного средства | 1980 |
|
SU1044508A1 |
| МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385241C2 |
| Устройство управления гусеничной машиной с двумя потоками мощности | 1989 |
|
SU1622214A1 |
| Устройство для управления движением транспортного средства | 1985 |
|
SU1281467A1 |
| МОДУЛЯТОР ЭЛЕКТРОННОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2005 |
|
RU2314217C2 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| Пневматический привод тормозов тягача | 1983 |
|
SU1150128A1 |
| Одноосный энергетический модуль сочлененного транспортного средства | 1984 |
|
SU1194755A2 |
Изобретение относится к транспортному машиностроению, в частности к устройствам для управления шарнирносочлененными машинами. Цель изобретения - повышение эффективности управления и повышение производительности транспортного средства. Шарнирносочлененное транспортное средство содержит два одинарных тормозных крана 21 и 22, основные рычаги 19 и 20 которых связаны посредством тяг 17 и 18 с рычагами мостика 10 управления соответствующих бортов энергетического модуля. При этом штуцеры 23 и 24 впускных клапанов одинарных тормозных кранов 21 и 22 соединены с ресивером 25, а штуцеры 26 и 27 выпускных клапанов - с тормозными камерами 30 и 31 соответствующих бортов ведущего моста транспортного модуля. 1 ил.

| Банников С | |||
| А., Родичев В | |||
| А | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
