Изобретение относится к транспортному машиностроению, в частности к тормозным системам колесных транспортных средств.
Цель изобретения - новыи1ение эффективности системы.
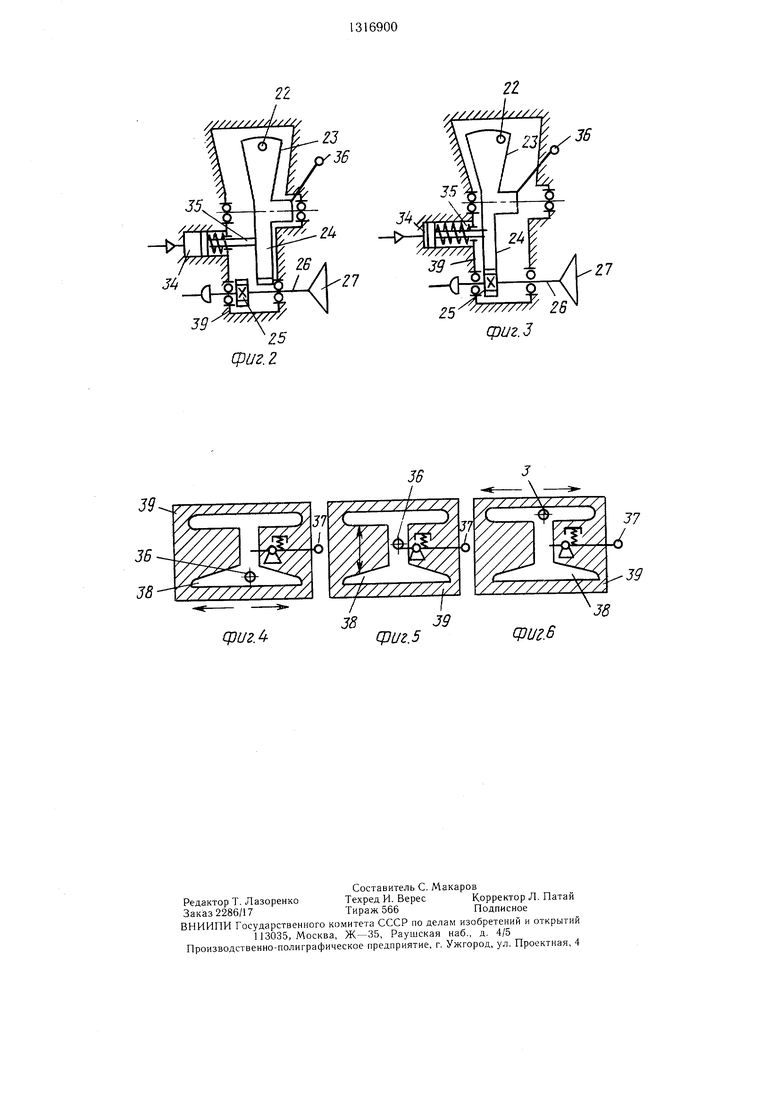
На фиг. 1 изображена нринципиальная схема системы; на фиг. 2 - кинематическая схема рулевого управления, когда поворотный рычаг связан с рулевым управлением; на фиг. 3 - то же, когда поворотный рычаг выведен из зацепления с шестерней рулевого управления; на фиг. 4 - вид на положение рукоятки поворотного рычага в момент связи его с рулевым управлением; на фиг. 5 - то же, в положении фиксированного выведения рукоятки из положения на фиг. 4; на фиг. б - то же, в положении перемещения поворотного рычага вправо или влево.
Система управления трактором содержит источник 1 питания сжатым воздухом и сообщенные с ним своими входами двухсекционный тормозной кран 2 и односекционные тормозные краны 3 и 4 правого и левого бортов трактора. Тормозной кран 2 связан с тормозной педалью через свою тягу 5 и имеет секцию 6 управления тормозами прицепа и секцию 7 управления тормозами трактора. Тяга 5 крана 2 шарнирно связана с рычагами 8 управления UJTOKOM 9. Секции 6 и 7 крана 2 имеют также выходные полости 10 и атмосферные полости П. Секция 7 имеет полость 12 управления порпшем 13, который жестко соединен со щтоком 9. Полость 12 сообщена каналом 14 с входной полостью 10 секции 6, которая через разобщительный кран 15 и соединительную муфту 16 сооб- ц;ена с магистралью 17 управления тормозами прицепа. Выходной полостью 10 секции 7 двухсекционный тормозной кран 2 сообщен с атмосферными полостями 18 односекцион- ных тормозных кранов 3 и 4, выходные полости 19 которых сообщены с тормозными камерами 20 и 21 правого и левого бортов трактора. Своими щтоками 22 краны 3 и 4 связаны с поворотным рычагом 23 сектора 24, который может находиться в зацеплении с щестерней 25 вала 26 рулевого колеса 27. Тормозные краны 2--4 имеют также сдвоенные клапаны 28 управления.
Коробка 29 переключения передач имеет рычаг 30 управления и тягу 31 включения повышенных скоростей. Причем в коробке 29 установлен разобщительный кран 32, который связан рукояткой 33 с тя1-ой 31 включения повын1епных скоростей. Кран 32 сообщен с источником 1 питания н с гщевмо- цилиндром 34. Шток 35 пневмоцилиндра 34 связан с сектором 24, который снабжен рукояткой 36. Рукоятка 36 может переводить сектор 24 в три положения. Первое положение (фиг. 1, 2, 4): сектор 24 связан с щестерней 25; второе положение (фиг. 3 и 5): сектор 24 выведен из зан.епления с шестерней 25 и зафиксирован фиксатором 37; третье положение (фиг. 3 и 6); сектор 24 может
за счет перемещения рукоятки 36 передвигается влево или вправо из фиксированного положения (фиг. 5). При этом все перемещения рукоятки 36 осунхествляются в фигурном пазу 38 корпуса 39 рулевого управления трактором. Краны 3 и 4 имеют полости 40 разгрузки усилия на штоках 22 за счет связи этих полостей с выходными полостями 19 через канал 41.
Q Система управления трактором работает следующим образом.
При движении трактора или тракторного поезда по прямолинейному участку на транспортной скорости рычаг 30 управления коробкой 29 переключения передач нахо5 дится в положении, когда включена повышенная скорость трактора. В этом случае тягой 31 рукоятка 33 переведена в положение, когда разобщительный кран 32 сооб- плает пневмоцилиндр 34 с источником 1 питания сжатым воздухом. Штоком 35 пневмо0 цилиндра 34 сектор 24 выведен из зацепления с шестерней 25 рулевого вала 26 (фиг. 3 и 5). При этом фиксатор 37 фиксирует положение рукоятки 36 управления сектором 24. Поворот трактора или тракторного поез5 да осуществляется за счет воздействия на рулевое колесо 27. При этом сектор 24 не воздействует рычагом 23 на штоки 22 бортовых тормозных кранов 3 и 4.
В случае необходимости затормаживания воздействуют на тягу 5 двухсекционного
0 тормозного крана 2. При этом сжатый воздух вначале удаляется из магистрали 17 управления тормозами прицела через полости 10 и 11 секции 6 в атмосферу. Происходит затормаживание прицепа. Затем по мере удаления воздуха из полости 12 секции
5 7 через канал 14 происходит переменхение нп ока 9 и сообщение атмосферных полостей кранов 3 и 4 с источником 1. Далее через атмосферные полости 18 сжатый воздух проникает в полости 19 кранов 3 и 4 и в ные камеры21.
Трактор затормаживается. Благодаря опережаюн1ему торможению прицепа в сцепном устройстве трактора возпикают усилия растяжения и устраняется отрицательное явление «складывания тракторного поезда.
5 При растормаживапии происходит выпуск сжатого воздуха из камер 21 трактора через атмосферную полость 11 секции 7 крана 2 и впуск сжатого воздуха в магистраль 17 управления тормозами прицепа через полость 10 секции 6 крана 2.
0 При движении трактора на рабочих (медленных) скоростях тяга 31 повышенных скоростей выключена. Разобпдительный кран 32 разобщает пневмоцилиндр 3 с источником 1 и сообихает с атмосферой.
5 Поворот трактора осуществляется двумя способами. В первом случае на фиксатор 37 не воздействуют и сектор 24 остается в зафиксироваппом состоянии (фиг. 5|,
Поворот осуществляется за счет воздействия на рулевое колесо 27 без воздействия на штоки .22 тормозных кранов 3 и 4.
Во втором случае воздействуют на фиксатор 37, освобождая рукоятку 36 сектора 24. Перемещением рукоятки 36 от себя сектор 24 вводят в зацепление с щестерней 25 (фиг. 2 и 4). Поворотом колеса 27 вправо или влево воздействуют рычагом 23 на один из щтоков 22 тормозного крана 3 или 4 левого или правого борта трактора.
При этом сжатый воздух поступает из источника 1 в полость 19 одного из кранов 3 или 4 и в тормозные камеры 20 или 21 левого или правого борта трактора. Происходит затормаживание одного борта трактора и крутой его поворот (разворот), что способствует улучщению его маневренности при выполнении рабочих операций. Снижению усилий на щтоках 22 и па рулевом колесе 27 способствует связь полости 19 входа каждого из кранов 3 и 4 с их полостями 40 через канал 41. Если при таком повороте возникла необходимость затормозить трактор, то воздействием на тягу 5 приводят в действие двухсекционный тормозной кран 2. Сжатый воздух из полости 10 секции 7 крана 2 поступает в атмосферные полости 18 бортовых тормозных кранов 3 и 4 и далее через их полости 19 - в тормозные камеры 20 и 21.
Система управления предусматривает также раздельное подтормаживание ведущих колес трактора воздействием па щтоки 22 кранов 3 и 4 через сектор 24 вручную (фиг. 6) Такая необходимость возникает, например, при попадании ведущ,их колес на дорожные покрытия с различным коэффициентом сопротивления перекатыванию (асфальт под одним колесом и лед под другим). В этом случае одно из колес, находяидееся на ледяном покрытии, проскальзывает с врапдением . Дифференциальная связь ведущих колес не обеспечивает передачи крутящего момента па колесо, находяп1ееся на асфальте. Трактор передвигаться не будет (одно колесо стоит, другое проскальзывает). Для трогания трактора и преодоления неблагоприятного участка дорожного покрытия перемещают рукоятку 36 на себя, а затем в сторону (фиг. 6) скользящего с врап1,ением колеса. В результате поворотный рычаг 23 воздействует на один из П1ТОКОВ 22 крана 3 или 4 и сжатый воздух подается в камеру 20 или 21. Скользяпдее с вращением колесо затормаживается. В дифференциале трактора появ0
ляется крутяпл,ий момент, способствующий перекатыванию колеса, находящегося на асфальте. Трактор передвигается, так как одно колесо катится, а второе, не врап1,аясь, 5 скользит, преодолевая ледяное покрытие. Во всех указанных случаях торможения и подтормаживания обеспечивается следящее действие тормозных кранов 2-4. Наблюдается прямо пропорциональная зависимость изменения величины давления сжатого воздуха в тормозных камерах 21 и 20, а также величины тормозных моментов на ведущих колесах трактора в зависимости от величины усилий, прикладываемых к органам управления. Этими органами являются тормозная
5 педаль, соединенная с тягой 5 двухсекционного тормозного крана 2, рулевое колесо 27, соединенное с сектором 24 (фиг. 2, 4). воч- действующим своим эксцентриком па штоки 22 односскциопных KpaiiOB 3, 4, п (.1яг ;; 36 (фиг. 3 и 7). соединенная также с секго0 ром 24.
Формула изобретения
Система управления колесным транспорт-.
5 пым средством, препмуп1.ествс11но т)()м. содержащая источник питания сжатым вол- духом и сообщенные с ним своими ;.5ходамп комбинированный тормозной крап, ч1равляе- мый тормозной педалью, и односекциог1Н111с тормозные краны унравления тормозами ле0 вого и правого бортов, связанные нггокамп с поворотным рычагом, кинематическим связанным с рулевым управлением, и крановое устройство для исключения раздельно1 о торможения по бортам, отличающаяся тем, что, с целью повыщепия эффективности системы,
5 она снабжена силовым цилиндром с поднру- жиненным порп1нем и штоком для выведения поворотного рычага из кинематической связи с рулевым управлением, и рукояткой ручного управления поворотны.м рычагом, расположенной в направляющем пазу, выполненном в корпусной детали и оборудованном фиксатором для удержания рукоятки в положении, при котором кинематическая связь поворотного рычага с рулевым управлением разомкнута, рабочая полость сило5 вого цилиндра подключена к источнику сжатого воздуха через крановое устройство, связанное с тягой коробки переключения передач повышенных скоростей, а атмосферные полости односекционных тор.мозных кранов нодключены к выходу одной из секций комбинированного тормозного крана.
j / //V/// 5
фиг. 2
5 ///////// 26
сриг.З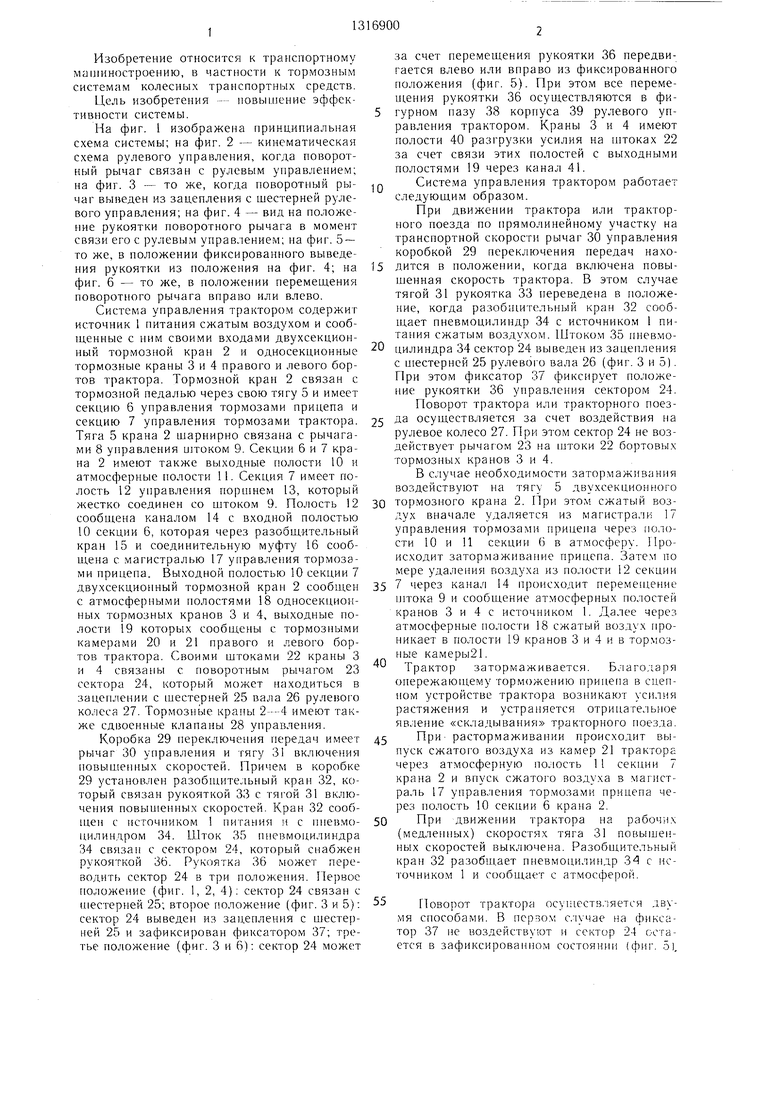

| название | год | авторы | номер документа |
|---|---|---|---|
| Тормозной кран пневматической системы трактора | 1982 |
|
SU1063670A1 |
| Гидропневматическая система тракторного поезда | 1975 |
|
SU727493A1 |
| Тормозной кран пневматической системы трактора | 1983 |
|
SU1114574A1 |
| Система управления колесным транспортным средством | 1987 |
|
SU1500533A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Гидропневматическая тормозная система трактора | 1981 |
|
SU1000319A1 |
| Тормозной кран пневматической системы трактора | 1984 |
|
SU1245469A1 |
| Тормозной кран пневматической системы трактора | 1984 |
|
SU1178644A2 |
| Тормозная система автопоезда | 1980 |
|
SU919917A2 |
| Узел управления пневматической тормозной системой трактора | 1988 |
|
SU1527042A1 |
Изобретение относится к системам управления колесными транспортными средствами, преимущественно тракторами. Цель изобретения - повышение эффективности системы. Система состоит из комбинированного тормозного крана 2, полость 10 которого соединена с полостями 18 односекционных тормозных кранов 3 и 4, управляемых штоками 22. Между штоками 22 установлен поворотный рычаг 23, связанный зубчатым сектором 24 с И1естерней 25 рулевого управления. Рычаг 23 соединен с рукояткой 36. Ги1евмо11или| др 34 со штоком 35 подключен к источнику 1 питания сжатым воздухом через Kpaii 32. связанный с тягой 31 вклкь чепия повышенных скоростей. Полости 19 кранов 3 и 4 сообп1епы с тормозными ка- мерами 20. При торможении сжатый из источника 1 через кран 2 попадает в полости 18 кранов 3 и 4. Краны 3 и 4 сообша- юг источ1П1К 1 с тормозными камерами 20. При повороте на малой скорости рычаг 23 воздействует на шток 22 одного из кранов 3 или 4 и ироисходит подтормаживание одного из бортов трактора. При движении на высоких скоростях кран 32 соединяет пнев- моцилиидр 34 с источником 1, 1ПТОК 35 выводит сектор 24 из зацепления с шестерней 25 и подтормаживания не происходит. Рукояткой 36 осушествляют поворот рычага вручную. 6 ил. Isir-t., JNKsi .. JW.. tr.12;:. « №..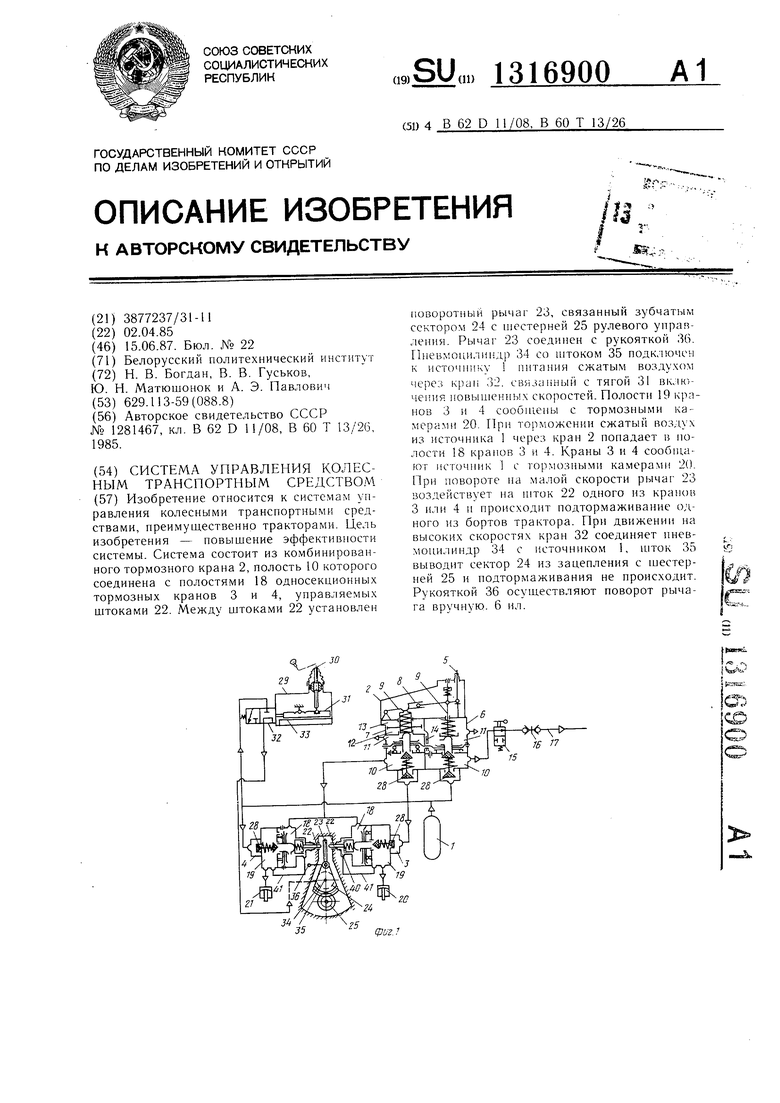
39
сригЛ
I 38J9
сриг .Б
| Устройство для управления движением транспортного средства | 1985 |
|
SU1281467A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
