315
Изобретение относится к технике автоматического измерения эксплуатационных параметров экскаватора-драглайна, и может быть использовано для контроля положения ковша в плоскости стрелы.
Цель изобретения - упрощение и повышение точности контроля положения ковшао
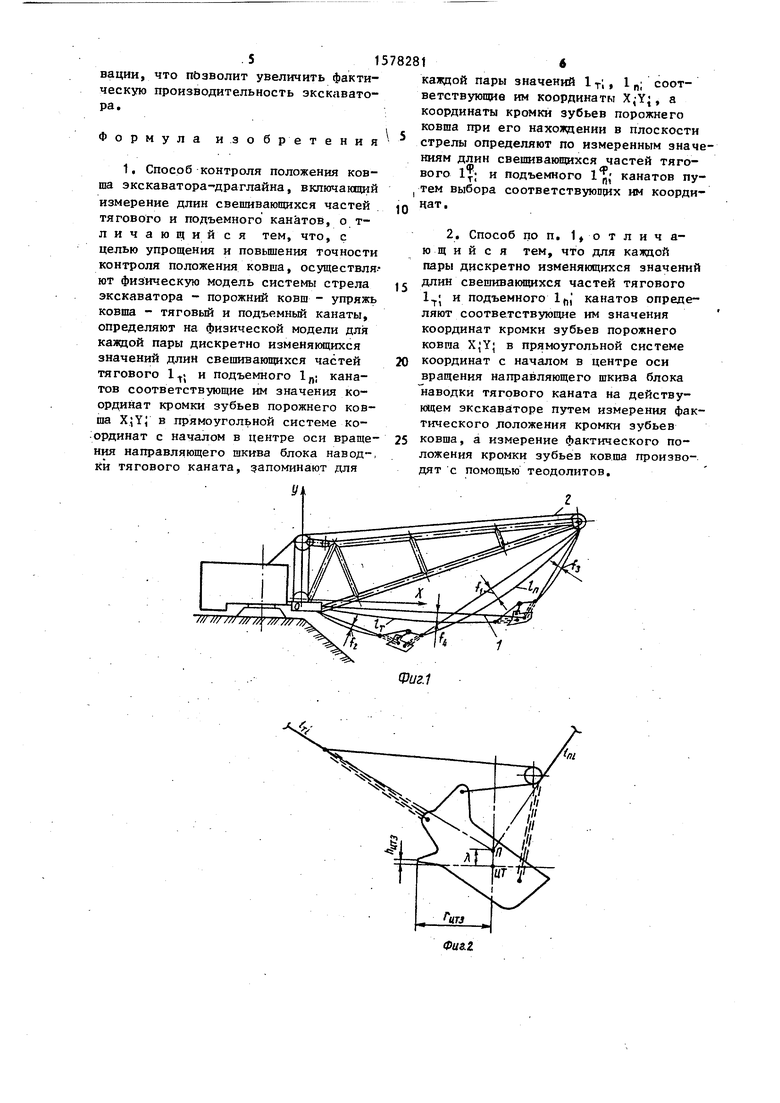
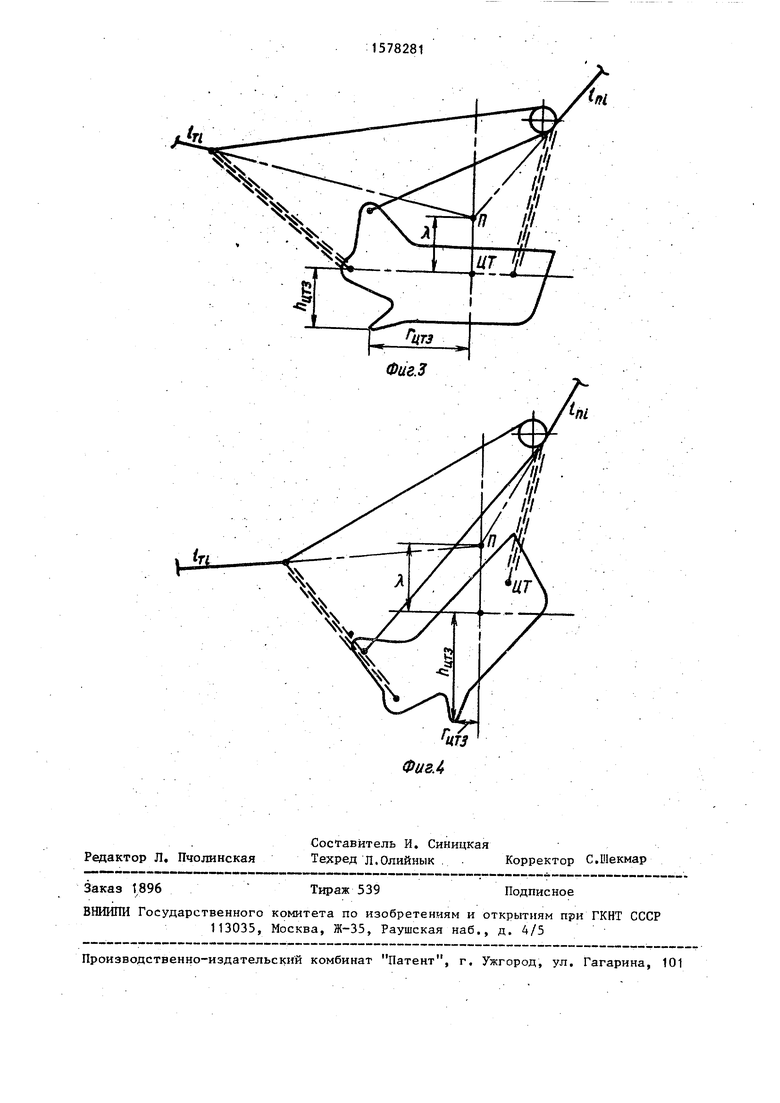
На фиг. 1 изображена схема экскаватора-драглайна с расположением ковша в плоскости стрелы с провисанием тягового и подъемного канатов в двух положениях, вид сбоку; на фиг. 2-4 - положения подвешенного на канатах порожнего ковша соответственно в плоскости стрелы вблизи блока наводки тягового каната, в средней части стрелы и в зоне саморазгрузки ковша; на фиг. 5 - структурная схема устройства для реализации способа контроля положения ковша.
Используя физическую модель системы стрела экскаватора - порожний ковш - упряжь ковша - тяговый и подъемный канаты и дискретно (например, с шагом дискретности 1-3 м в зависимости от типа экскаватора и требуемой точности измерения координат ковша) изменяя длины свисающих частей тягового и подъемного канатов, можно для каждой пары значений 1т, 1 п определить соответствующие координаты X;Y, в системе координат ХОУ. В этом случае X;Y( учитывают изменение hWTi, г цт. и в зависимости от координат ковша. Очевидно, определение XjY; для каждой пары значений 1Т; , 1ц можно произвести и на действующем экскаваторе, измеряя фактическое положение кромки зубьев ковша, например, с помощью теодолитов. Получение указанной информации непосредственно
на экскаваторе характеризуется относительно большой трудоемкостью, однако позволяет обойтись без моделирования системы стрела экскаватора - порожний ковш - упряжь ковша - тяговый и подъемный канаты и получить меньшую погрешность измерения. Таким образом, 50 имея для каждой пары значений IT, 1 „; величины X ,-Y; , легко определить координаты зубьев ковша по измеренным величинам 1$ , 1 : без выполнения
m
55
вычислительных процедур
Устройство содержит датчик длин свешивающихся частей тягового 1 и подъемного 2 канатов, блок 3 выбора,
10
э
0
5
0
35
40
0
5
блок 4 управления и выходной блок 5. Блок 3 выбора включает узел 6 сравнения, коммутатор 7, запоминающее устройство 8. Датчики 1 и 2 подключены к входам узла 6 сравнения и блока 4 управления0 Выходы запоминающего устройства 8 через коммутатор 7 подключены к входам узла 6 сравнения, выход которого связан с входом выходного блока 5 о
Устройство работает следующим образом.
В запоминающее устройство 8 записы- 5 вают множество значений flT; ln;« -X1«Y;V которые отображают значения координат кромки зубьев ковша X;Y; для каждой дискретно изменяющейся пары значений 1Т; , „; . При перемещении подвешенного на тяговом и подъемном канатах порожнего ковша в плоскости стрелы на выходах датчиков 1, 2 формируются
выходные сигналы 1™; , „;, пропорциональные длинам свешивающихся частей тягового и подъемного канатов. Эти сигналы поступают на узел сравнения в блоке 3 выбора„ Блок 4 управления при каждом изменении входных величин
Ф СО
IT; , вырабатывает команду, которая поступает на коммутатор 7, в результате чего коммутатор 7 обеспечивает последовательное поступление с запоминающего устройства 8 на узел 6 сравнения множества записей flT. ln; XIYjj. При совпадении адресов , 1 ; и 1Т; , 1 п; с выхода узла 6 поступают сигналы X;Yf , соответствующие координатам кромки зубьев ковша при данных значениях 1-;, 1 п; . Указанные сигналы поступают на выходной блок 5 и в блок 4 управления который приводится в исходное состояние.
Таким образом, на выходном блоке 5 формируется информация, характеризующая координаты кромки зубьев порожнего ковша при его нахождении в подвешенном состоянии в любой рабочей точке, расположенной в вертикальной плоскости стрелы. Это позволяет использовать способ при определении координат любой точки забоя в рабочей зоне, т.е. определять фактические значения параметров паспорта экскаваЦИИо
Использование способа позволяет снизить объемы переэкскавации в сложных бестранспортных технологических схемах за счет ликвидации нарушений заданных параметров паспорта эксканации, что позволит увеличить фактическую производительность экскаватора.
Формула изобретения
1. Способ контроля положения ковша экскаватора-драглайна, включающий измерение длин свешивающихся частей тягового и подъемного канатов, о т- личающий ся тем, что, с целью упрощения и повышения точности контроля положения ковша, осуществляют физическую модель системы стрела экскаватора - порожний ковш - упряжь ковша - тяговый и подъемный канаты, определяют на физической модели для каждой пары дискретно изменяющихся значений длин свешивающихся частей тягового lt« и подъемного 1л канатов соответствующие им значения координат кромки зубьев порожнего ковша X;YJ в прямоугольной системе координат с началом в центре оси враще- ния направляющего шкива блока наводки тягового каната, запоминают для
Щ
каждой пары значений 1 т;, 1
п.
соота
координаты кромки зубьев порожнего ковша при его нахождении в плоскости стрелы определяют по измеренным значениям длин свешивающихся частей тягового и подъемного канатов путем выбора соответствующих им координат.
ветствующие им координаты X,-Y;,
2. Способ по п. отличающийся тем, что для каждой пары дискретно изменяющихся значений длин свешивающихся частей тягового 1Т; и подъемного канатов определяют соответствующие им значения координат кромки зубьев порожнего ковгаа XjY; в прямоугольной системе координат с началом в центре оси вращения направляющего шкива блока наводки тягового каната на действующем экскаваторе путем измерения фактического .положения кромки зубьев ковша, а измерение фактического положения кромки зубьев ковша производят с помощью теодолитов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| СПОСОБ РАЗГРУЗКИ КОВША ДРАГЛАЙНА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДРАГЛАЙНА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2000 |
|
RU2184190C1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| КОВШ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1995 |
|
RU2078875C1 |
| Рабочее оборудование экскаватора-драглайна | 1981 |
|
SU1006628A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДРАГЛАЙНА ШАГАЮЩЕГО ПОГРУЗОЧНОГО | 1993 |
|
RU2090705C1 |
Изобретение относится к способам контроля положения ковша экскаватора-драглайна. Цель - упрощение и повышение точности контроля положения ковша. В запоминающее устройство 8 записывают множество значений {L тIL пI @ X IY I}, которые отображают значения координат кромки зубьев ковша X IY I для каждой дискретно изменяющейся пары значений L тI, L пI. При перемещении ковша на выходах датчиков 1 и 2 формируются выходные сигналы L тI, L пI, пропорциональные длинам свешивающихся частей тягового и подъемного канатов. Эти сигналы поступают на узел сравнения в блоке выбора 3. Блок управления 4 при каждом изменении L тI, L пI вырабатывает команду, которая поступает на коммутатор 7. В результате этого коммутатор 7 обеспечивает последовательное поступление запоминающего устройства 8 на узел сравнения 6 множества записей {L тI, L пI @ X IY I}, при совпадении адресов L тI L пI и L тI, L пI с выхода узла 6 поступают сигналы X IY I, соответствующие координатам кромки зубьев ковша при данных значениях L тI, L пI. Указанные сигналы поступают на выходной блок 5 и в блок управления 4, который приводится в исходное положение. Это позволяет определить координаты любой точки забоя в рабочей зоне и снизить объемы переэкскавации. 1 з.п. ф-лы, 5 ил.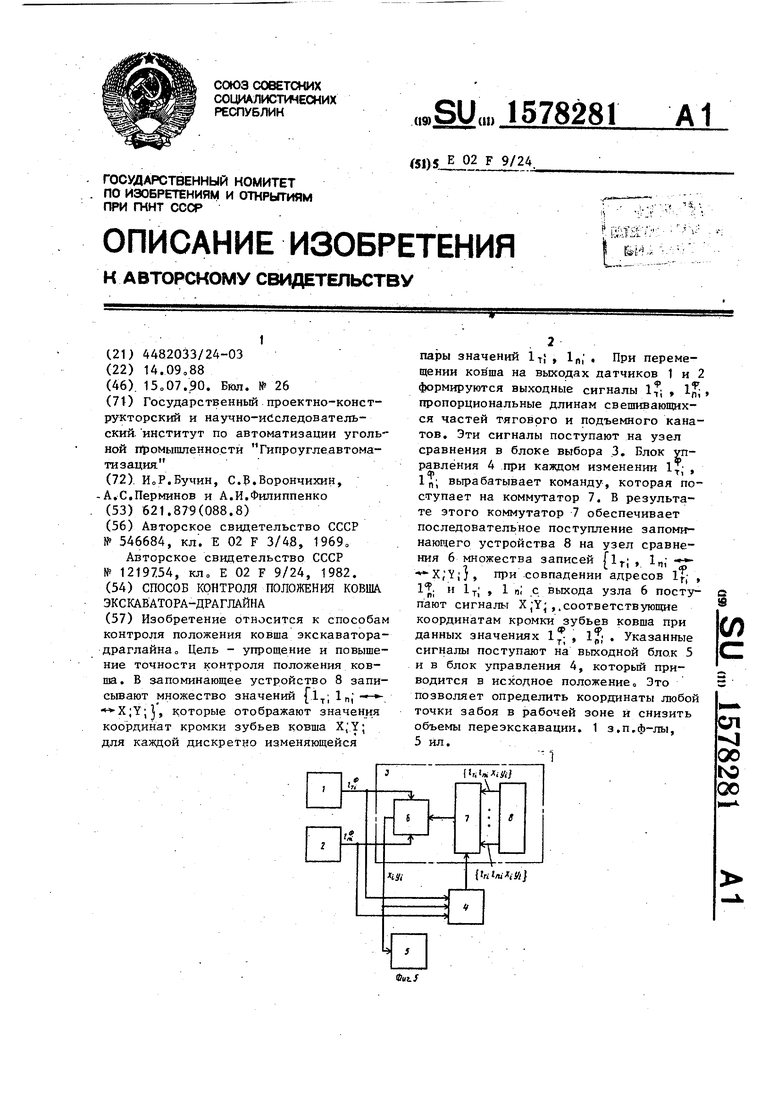
Составитель И. Синицкая Редактор Л. Пчолинская Техред л.Олийнык Корректор С.Шекмар
Заказ 1896
Тираж 539
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг.4
Подписное
| Устройство для записи координат траекторий движения ковша драглайна | 1974 |
|
SU546684A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
