фиг 1
Изобретение относится к строительству и может быть использовано в качестве навесного рабочего органа гидравлического экскаватора.
Цель изобретения - расширение технологических возможностей.
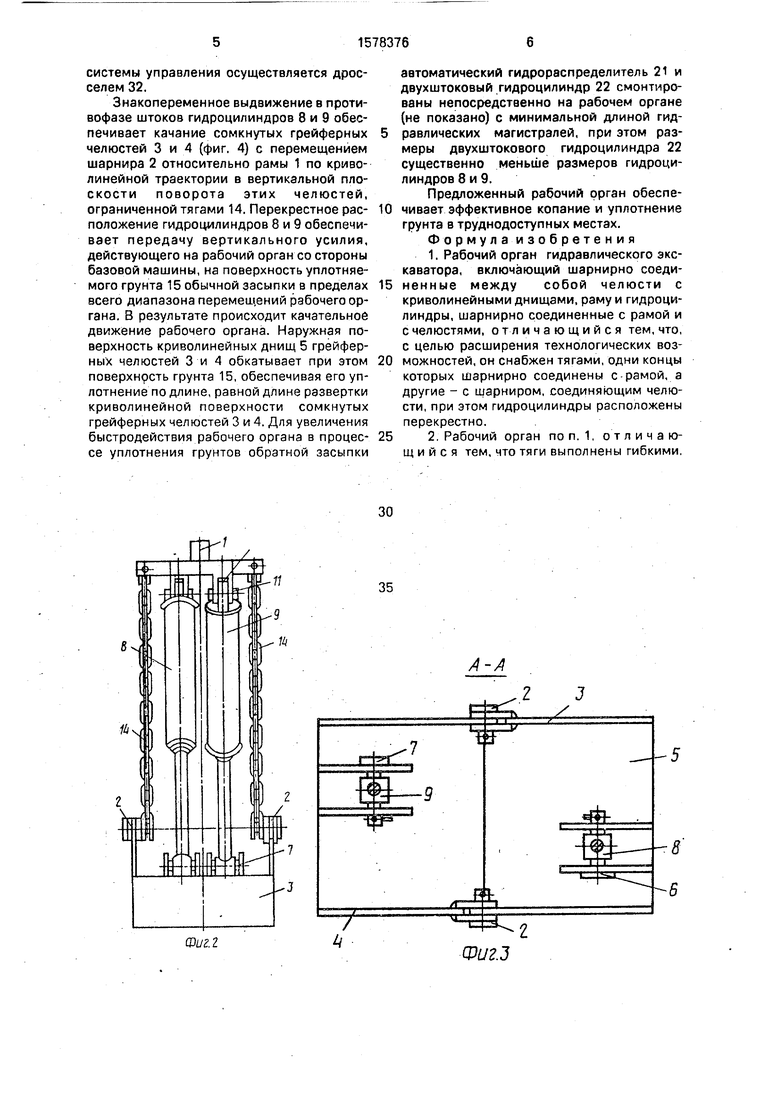
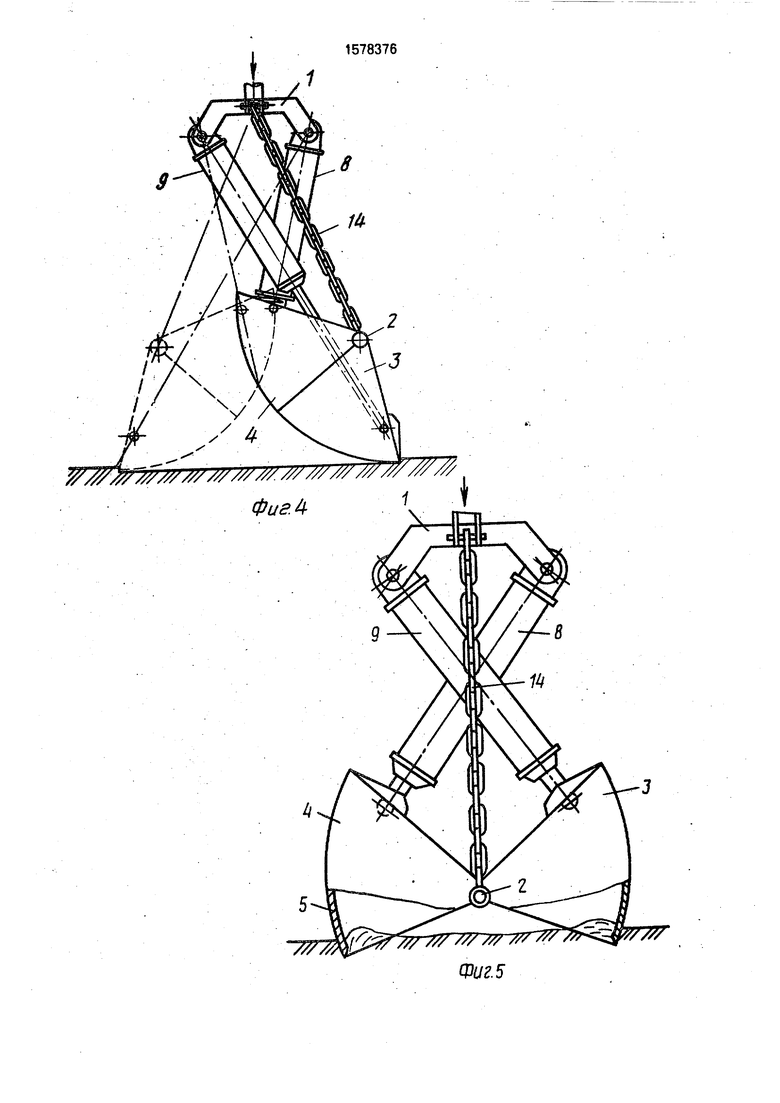
На фиг. 1 показан рабочий орган, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - рабочий орган при уплотнении грунта; на фиг. 5 - то же, при разработке грунта; на фиг. 6 - принципиальная гидравлическая схема управления рабочим органом.
Рабочий орган гидравлического экскаватора содержит раму 1, смонтированную на стреле экскаватора (не показана), и соединенные между собой посредством шарнира 2 грейферные челюсти 3 и 4 с криволинейными днищами 5. Верхние наружные края челюстей 3 и 4 связаны при помощи шарниров б и 7 с гидроцилиндрами управления 8 и 9, которые расположены перекрестно и посредством шарниров 10 и 11 присоединены к проушинам 12 и 13 рамы 1. Шарнир 2 связан с рамой 1 при помощи тяг 14; выполненных в виде жестких стержней или в виде гибких связей, например якорных цепей, с возможностью перемещения относительно рамы 1 по криволинейной траектории (фиг. 4).
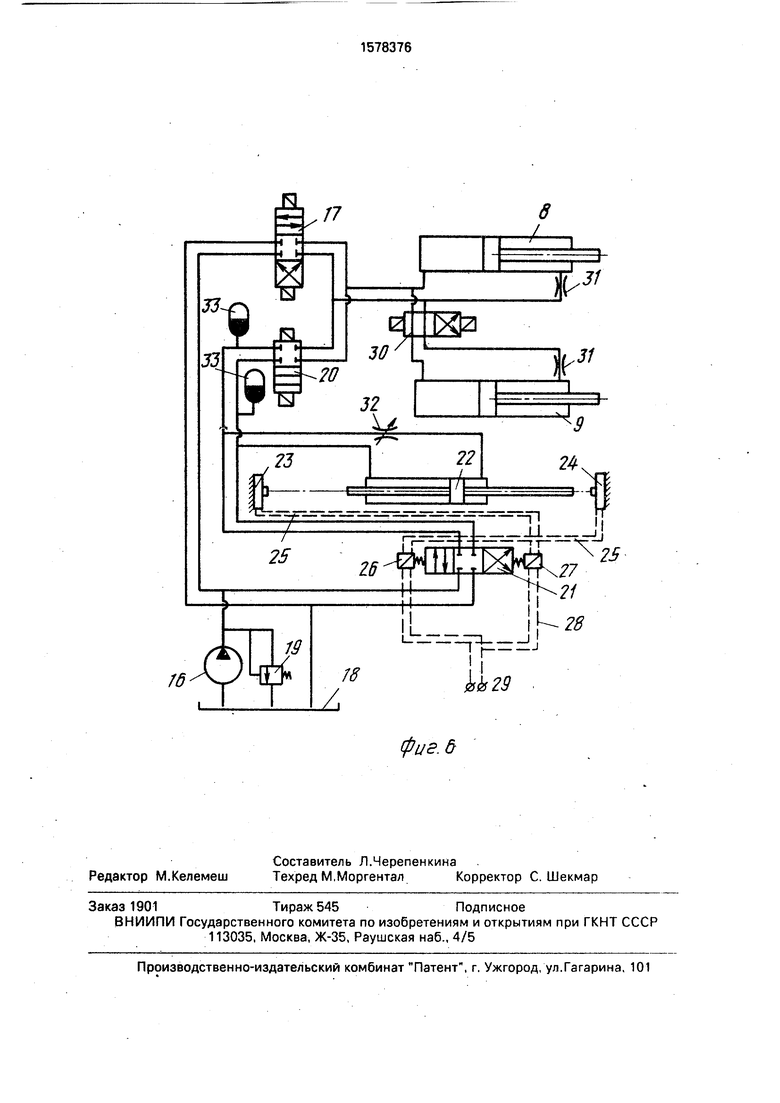
Рабочий орган разрабатывает или уплотняет грунт 15. Гидроцилиндры управления 8 и 9 соединены с источником давления насосом 16 через трехпозиционный гидрораспределитель 17 (фиг, 6). Насос 16 соединен с баком 18 и снабжен перепускным клапаном 19. Параллельно гидрораспределителю 17 гидроцилиндры 8 и соединены с насосом 16 через разобщающий кран 20 и дополнительный автоматический трехпозиционный гидрораспределитель 21, выполненный с запертыми каналами в средней позиции и взаимно инвертированными проходными каналами в крайних позициях. Параллельно гидроцилиндрам управления 8 и 9, между разобщающим краном 20 и гидрораспределителем 21, подключен дополнительный двухштоковый гидроцилиндр 22 с конечными выключателями 23 и 24, неподвижно смонтированными по обеим сторонам гидроцилиндра 22 в конечных точках хода его штоков и соединенными линиями 25 с элементами управления 26 и 27 гидрораспределителя 21. В свою очередь, элементы управления 26 и 27, например электромагнитного типа,соединены линиями 28 с источником 29 электрического тока. Один из гидроцилиндров управления 9 снабжен инверсирующим гидрораспределителем 30. Со штоковыми полостями гидроцилиндров 8 и 9 соединены дроссели 3J, а с одной из полостей двухштокового гидроцилиндра 22 соединен управляемый дроссель 32. На гидравлических магистралях между разобщающим краном 20 и гидрораспределителем 21 установлены гидроаккумуляторы 33.
Рабочий орган гидравлического экскаватора в режиме копания грунта грейфером
0 работает следующим образом.
Разобщающий кран 20 (фиг. 6) переводят в позицию с запертыми каналами, а ин- версирующий гидрораспределитель 30 соединяет параллельно поршневые и што5 ковые полости гидроцилиндров 8 и 9. После этого гидрораспределителем 17 обеспечивают обычным образом подачу жидкости поддавлением от насоса 16 к одноименным полостям гидроцилиндров 8 и 9, в результа0 те чего производится раскрытие грейферных челюстей 3 и 4 (фиг, 5), внедрение их в грунт 15 и закрытие челюстей выталкиванием штоков гидроцилиндров 8 и 9. При любом положении штоков гидроцилиндров 8 и 9
5 механизм сохраняет устойчивость относительно рамы 1 за счет перекрестного положения этих гидроцилиндров. При выталкивании штоков гидроцилиндров 8 и 9 тяги 14 находятся в натянутом положении.
0 При работе в режиме уплотнения грунтов обратной засыпки гидрораспределитель 17 устанавливают в среднюю позицию с запертыми каналами после выдвижения штоков гидроцилиндров 8 и 9 и закрытия
5 челюстей 3 и 4, разобщающий кран 20 - в позицию с проходными каналами, а гидрораспределитель 30 инверсирует соединение между собой полостей гидроцилиндров 8 и 9. Штоковая полость гидроцилиндра 8
0 соединяется с поршневой полостью сидро- цилиндра 9 и наоборот. При этом обеспечивается знакопеременное движение штоков гидроцилиндров 8 и 9 в противофазе, которое сопровождается синхронным движени5 ем оппозитных штоков гидроцилиндра 22 с переключением автоматического гидрораспределителя 21 из одной крайней позиции в другую. Достижение крайней точки хода одним из штоков гидроцилиндра 22 вызы0 вает срабатывание соответствующего выключателя 24 или 23, который включает соответствующий элемент управления 26 или 27 автоматического гидрораспределителя 21 и переключает его из одной крайней
5 позиции в другую с противофазным изменением направления движения штоков гидроцилиндров 8 и 9. Гидроаккумуляторы 33 обеспечивают снижение динамики гидропривода при реверсировании гидроцилиндров 8 и 9. Регулировка автоматической
системы управления осуществляется дросселем 32.
Знакопеременное выдвижение в проти- вофазе штоков гидроцилиндров 8 и 9 обеспечивает качание сомкнутых грейферных челюстей 3 и 4 (фиг. 4) с перемещением шарнира 2 относительно рамы 1 по криволинейной траектории в вертикальной плоскости поворота этих челюстей, ограниченной тягами 14. Перекрестное рас- положение гидроцилиндров 8 и 9 обеспечивает передачу вертикального усилия, действующего на рабочий орган со стороны базовой машины, на поверхность уплотняемого грунта 15 обычной засыпки в пределах всего диапазона перемещений рабочего органа. В результате происходит качательное движение рабочего органа. Наружная поверхность криволинейных днищ 5 грейферных челюстей 3 и 4 обкатывает при этом поверхнрсть грунта 15, обеспечивая его уплотнение по длине, равной длине развертки криволинейной поверхности сомкнутых грейферных челюстей 3 и 4. Для увеличения быстродействия рабочего органа в процес- се уплотнения грунтов обратной засыпки
автоматический гидрораспределитель 21 и двухштоковый гидроцилиндр 22 смонтированы непосредственно на рабочем органе (не показано) с минимальной длиной гидравлических магистралей, при этом размеры двухштокового гидроцилиндра 22 существенно меньше размеров гидроцилиндров 8 и 9.
Предложенный рабочий орган обеспечивает эффективное копание и уплотнение грунта в труднодоступных местах.
Формула изобретения
1.Рабочий орган гидравлического экскаватора, включающий шарнирно соединенные между собой челюсти с криволинейными днищами, раму и гидроцилиндры, шарнирно соединенные с рамой и с челюстями, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен тягами, одни концы которых шарнирно соединены с рамой, а другие - с шарниром, соединяющим челюсти, при этом гидроцилиндры расположены перекрестно.
2.Рабочий орган по п. 1, отличающийся тем, что тяги выполнены гибкими.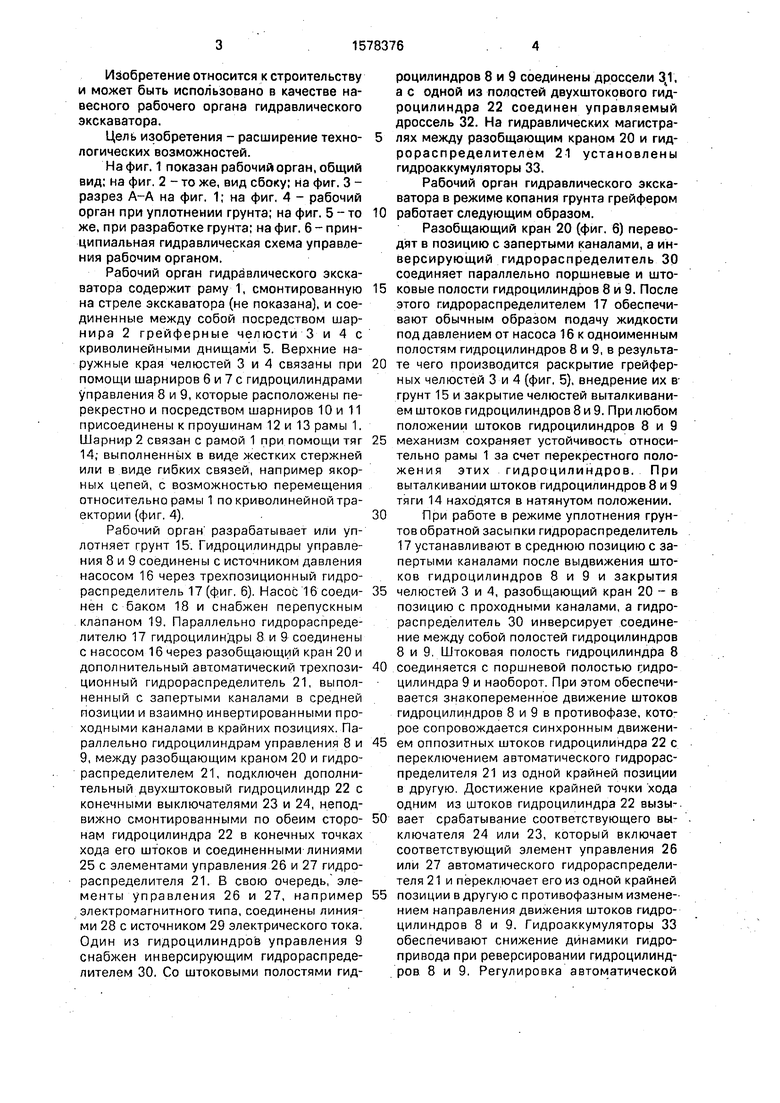
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового экскаватора | 1988 |
|
SU1602951A1 |
| Рабочее оборудование гидравлического экскаватора | 1988 |
|
SU1694788A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1661290A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1382914A2 |
| Передвижная установка для мойки прямоугольных мусорных контейнеров | 1988 |
|
SU1583328A1 |
| Рабочее оборудование гидравлического экскаватора | 1984 |
|
SU1173011A1 |
| Устройство для уплотнения материалов | 1990 |
|
SU1719525A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1328437A1 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
Изобретение относится к строительству и может быть использовано в качестве навесного рабочего органа гидравлического экскаватора. Цель - расширение технологических возможностей. Рабочий орган гидравлического экскаватора содержит соединенные посредством шарнира 2 челюсти 3 и 4 с криволинейными днищами 5, раму 1, гидроцилиндры /ГЦ/ 8 и 9 и тяги /Т/ 14. Концы ГЦ 8,9, расположенных перекрестно, шарнирно соединены с рамой 1 и с челюстями 3,4. Обе Т 14 шарнирно соединены с рамой и с шарниром 2 и м.б.выполнены гибкими. В режиме копания грунта ГЦ 8,9 обеспечивают открытие и закрытие челюстей 3,4. В режиме уплотнения грунта сомкнутые челюсти 3,4 перемещаются вместе с Т 14 по криволинейной траектории, уплотняя грунт днищами. 1 з.п.ф-лы, 6 ил.
11
74
Фиг.2
А-А
Фиг.з
1578376
s
8
Фиг. 5
reЧЕ
8
29
фие.Ь
| Грейферная установка | 1975 |
|
SU653346A1 |
| Напорный механизм проходческого грейфера | 1976 |
|
SU602651A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
