Изобретение относится к прокатному производству и может быть применено в системах управления электроприводами валков реверсивных прокатных станов, преимущественно слябингов, балочных и универсальных станов,
Цель изобретения - повышение производительности стана за счет сокращения простоев на ремонт и настройку„
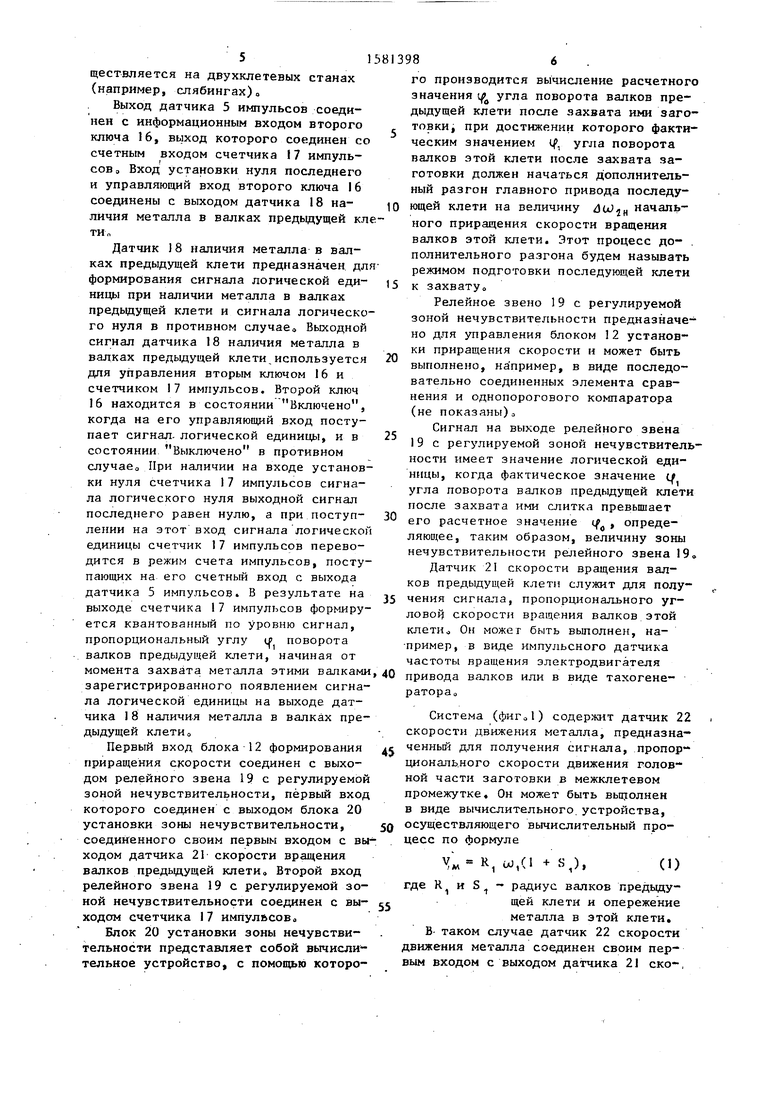
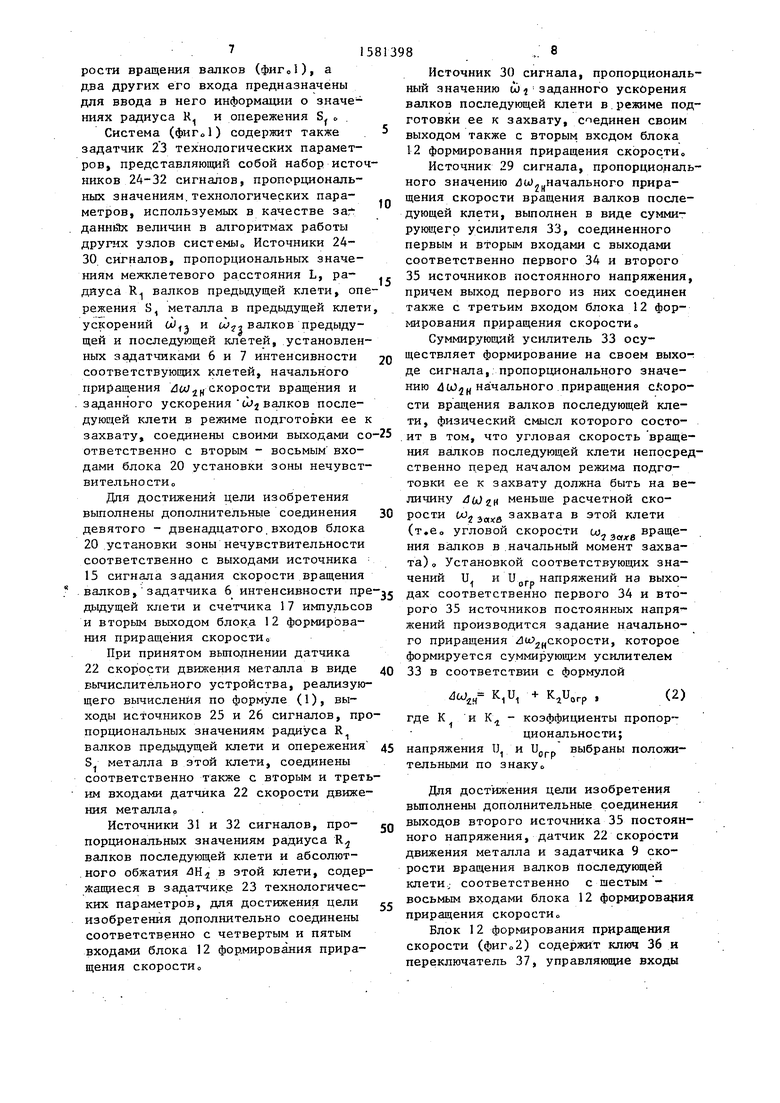
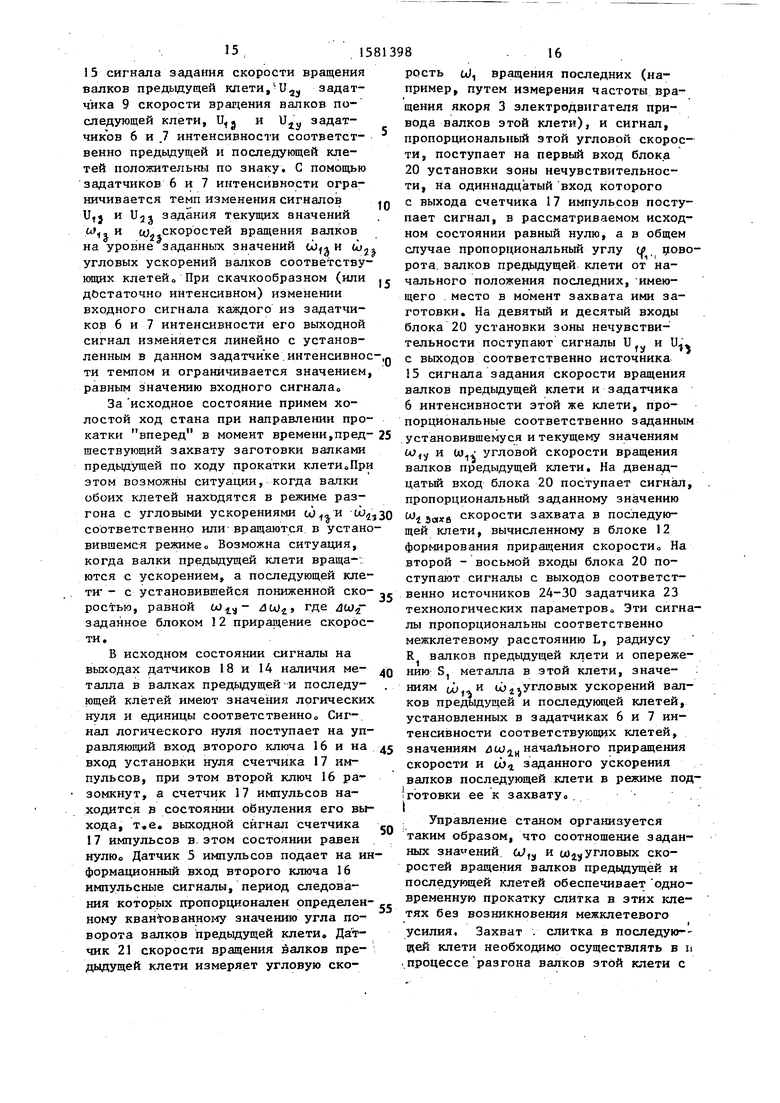
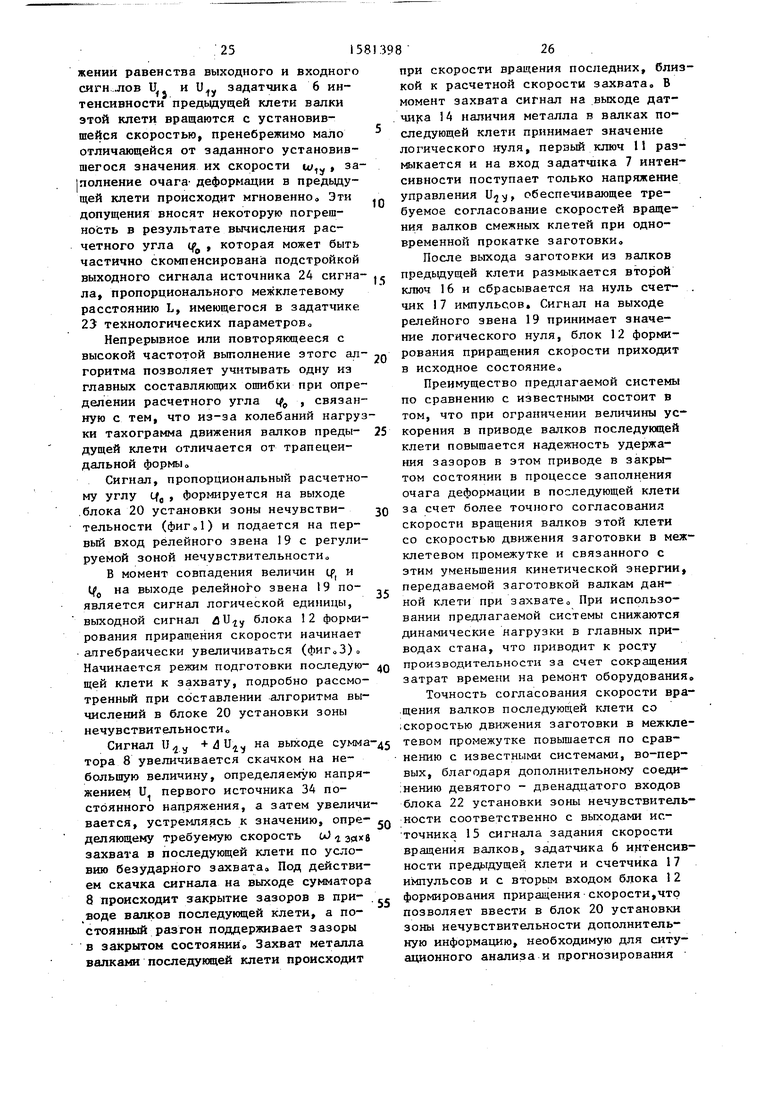
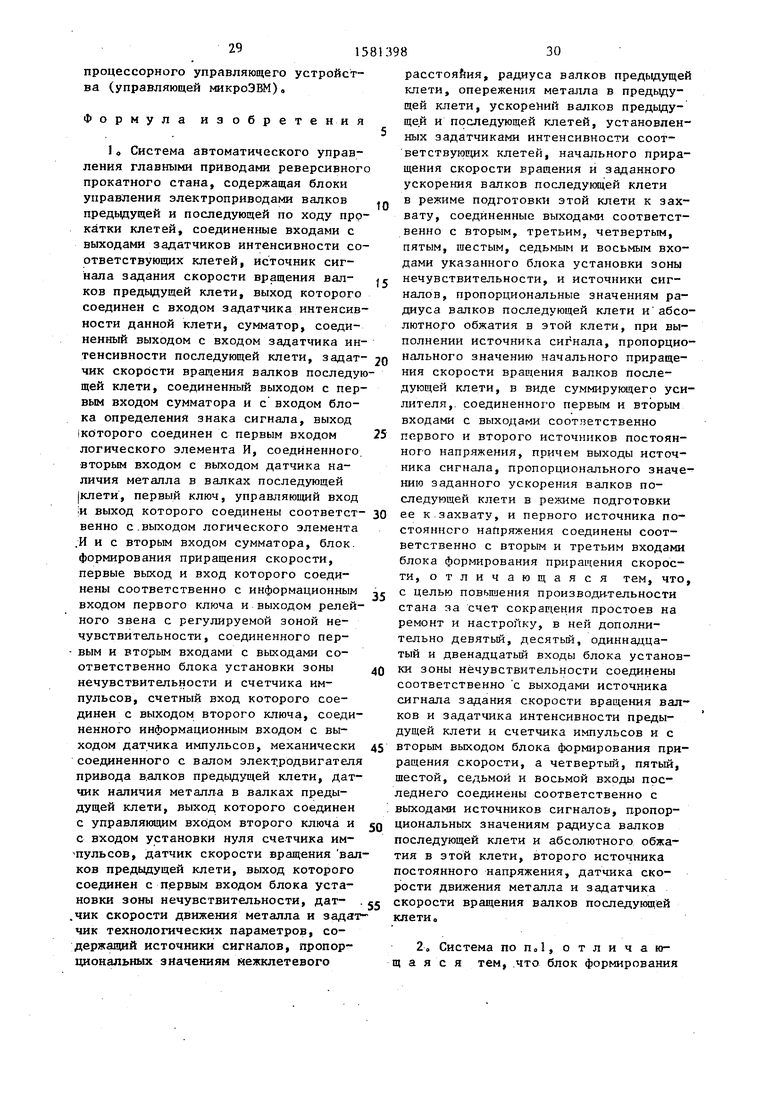
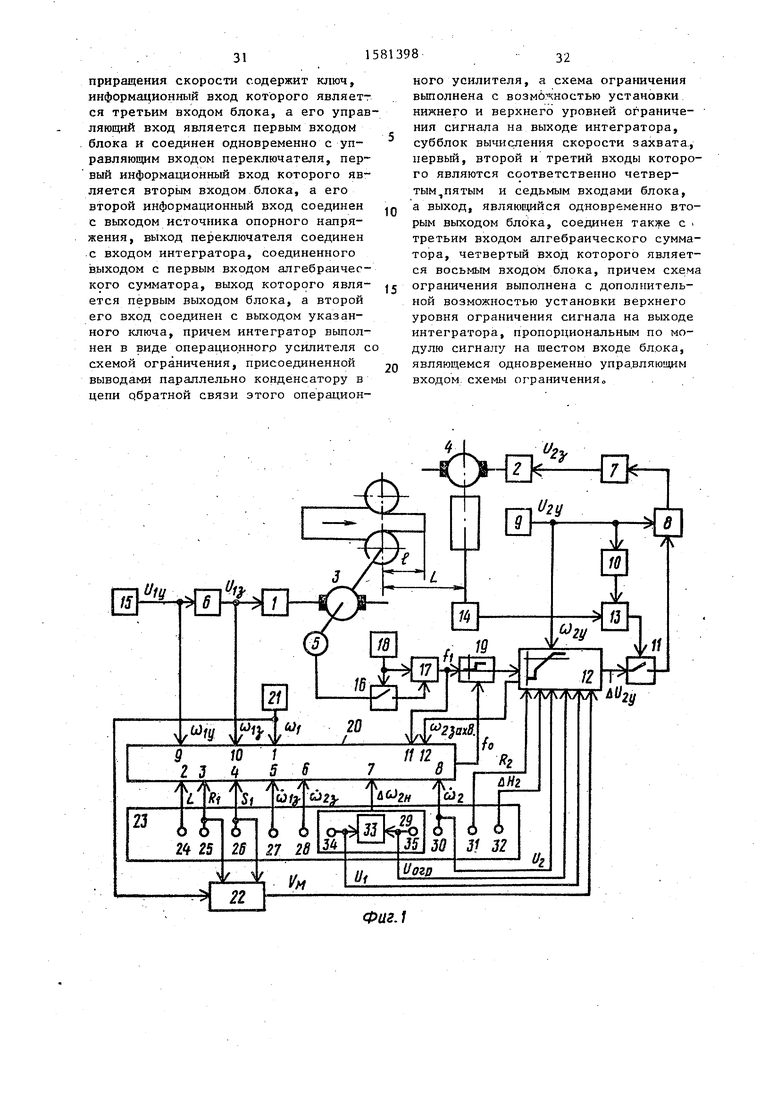
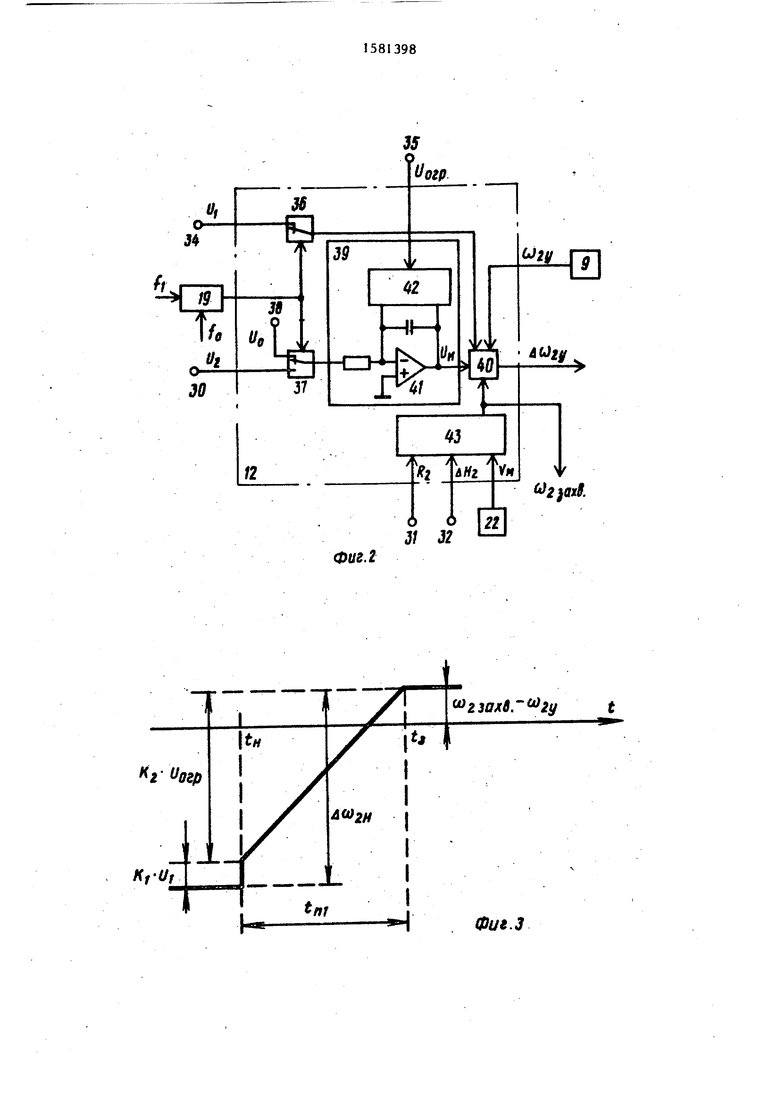
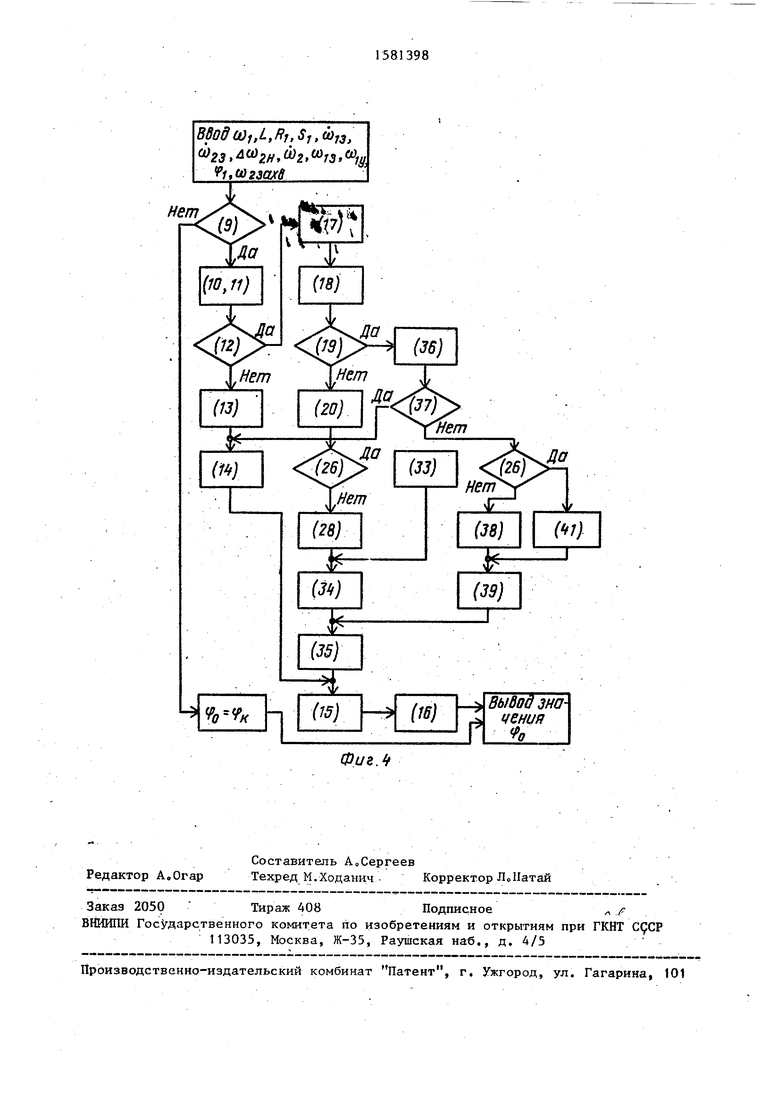
На фиг01 и 2 представлены соот- ветственно.функциональные схемы системы автоматического управления главным приводом реверсивного прокатного |стана и блока формирования приращения скорости; на фиг03 - график изменения заданного значения приращения скорое- ти вращения валков последующей клети в режиме подготовки ее к захвату; на фиг,4 - блок-схема вычислительного алгоритма, реализуемого блоком уста- но вки зоны нечувствительности,
Система автоматического управления главными приводами реверсивного прокатного стана (фиг01) содержит блоки 1 и 2 управления электроприводами валков соответственно предыдущей и последующей по ходу прокатки клетей, электрически соединенные с якорями 3 и 4 двигателей привода валков соответствующих клетейо Якорь 3 двигателя привода валков предыдущей клети механически соединен с датчиком 5 импульсов. Последний предназначен для получения сигнал в виде последовательности импульсов, появление каждо- го из которых свидетельствует о пово- якоря 3, а следовательно, и валков предыдущей клети на определенный уголо Выходы блоков 1 и 2 управления электроприводами валков соединены с выходами задатчиков 6 и 7 интенсивности соответствующих клетей Последние предназначены для формирования сигналов U, и и2, задания скорости вращения валков соответствующих клетей с ограничением темпа изменения этих сигналово Вход задатчика 7 интенсивности последующей клети соединен с выходом сумматора 8, первый вход которого соединен с выходом задатчика 9 CKO расти вращения валков последующей клети и с входом блока 10 определения знака сигналао Второй вход сумматора 8 соединен с выходом первого ключа 11, информационный вход которого соег динен с первым выходом блока 12 формирования приращения скорости,, Управляющий вход первого ключа 11 соединен .с выходом логического элемента И 13, первый и второй входы которого соеди- нены соответственно с выходами блока 10 Определения знака сигнала и датчи- |ка 14 наличия металла в валках последующей клети„
Задатчик 9 скорости вращения валков последующей клети предназначен для формирования сигнала U2 задания установившегося значения скорости вращения валков этой клети и может быть выполнен, например, в виде сель- синного командоаппарата Знак выходного сигнала Uly задатчика 9 скорости вращения валков последующей клети определяет заданное направление вращения валков последующей клети, т0е0 направление прокатки0
Блок 10 определения знака сигнала служит для формирования сигнала логической единицы при направлении прокатки от предыдущей клети к последующей (условное направление вперед) и выполнен в виде однопорогового компаратора. На второй вход сумматора 8 через ключ И подается сигнал 4U2v, пропорциональный заданному приращению скорости вращения валков последующей клети Для формирования этого сигнала предназначен блок 12 формирования приращения скорости.
Логический элемент И 13 предназна- чен для формирования логического сигнала, используемого для управления первым ключом 11. При наличии на выходе логического элемента И 13 сигнала логической единицы первый ключ 11 находится в состоянии Включено, а в противном,случае, т.е„ при наличии на выходе логического элемента И 13 сигнала логического нуля, первый ключ 11 находится в Состоянии
Выключено о i
Датчик 14 наличия металла в валках последующей клети обеспечивает формирование сигналов логической единицы при отсутствии и логического нуля при наличии металла в валках последующей клети0 Он выполнен в виде однопорогового компаратора0
Вход задатчика 6 интенсивности предыдущей клети соединен с выходом источника 15 сигнала задания скорости вращения валков предыдущей клети, аналогично) по назначению и исполнению задатчик , 9 скорости вращения валков последующей клети. Последний может быть использован одновременно в качестве источника 15 задания скорости вращения валков предыдущей клети , для обеспечения синхронности управления скоростными режимами предыдущей и последующей клетей, что обычно осуществляется на двухклетевых станах (например, слябингах),,
Выход датчика 5 импульсов соединен с информационным входом второго ключа 16, выход которого соединен со счетным входом счетчика 17 импульсов „ Вход установки нуля последнего и управляющий вход второго ключа I6 соединены с выходом датчика 18 на- личия металла в валках предыдущей клети „
Датчик J 8 наличия металла в валках предыдущей клети предназначен для формирования сигнала логической еди- ницы при наличии металла в валках предыдущей клети и сигнала логического нуля в противном случае Выходной сигнал датчика 18 наличия металла в валках предыдущей клети используется для управления вторым ключом 16 и счетчиком 17 импульсов. Второй ключ 16 находится в состоянии Включено, когда на его управляющий вход поступает сигнал, логической единицы, ив состоянии Выключено в противном случае При наличии на входе установки нуля счетчика 17 импульсов сигнала логического нуля выходной сигнал последнего равен нулю, а при поступ- лении на этот вход сигнала логической единицы счетчик 17 импульсов переводится в режим счета импульсов, поступающих на его счетный вход с выхода датчика 5 импульсов. В результате на выходе счетчика 17 импульсов формируется квантованный по уровню сигнал, пропорциональный углу ц поворота валков предыдущей клети, начиная от момента захвата металла этими валками зарегистрированного появлением сигнала логической единицы на выходе датчика 18 наличия металла в валках предыдущей клетио
Первый вход блока 12 формирования приращения скорости соединен с выходом релейного звена 19 с регулируемой зоной нечувствительности, первый вход которого соединен с выходом блока 20 установки зоны нечувствительности, соединенного своим первым входом с выходом датчика 21 скорости вращения валков предыдущей клети Второй вход релейного звена 19 с регулируемой зоной нечувствительности соединен с вы- ходом счетчика 17 импульсово
Блок 20 установки зоны нечувствительности представляет собой вычислительное устройство, с помощью которого производится вычисление расчетного значения угла поворота валков предыдущей клети после захвата ими заготовки, при достижении которого фактическим значением tf, угла поворота валков этой клети после захвата заготовки должен начаться дополнительный разгон главного привода последующей клети на величину 4с05н начального приращения скорости вращения валков этой клети. Этот процесс дополнительного разгона будем называть режимом подготовки последующей клети к захвату
Релейное звено 19 с регулируемой зоной нечувствительности предназначено для управления блоком 12 установки приращения скорости и может быть выполнено, например, в виде последовательно соединенных элемента сравнения и однопорогового компаратора (не показаны)о
Сигнал на выходе релейного звена 19 с регулируемой зоной нечувствительности имеет значение логической единицы, когда фактическое значение ( угла поворота валков предыдущей клети после захвата ими слитка превышает его расчетное значение , определяющее, таким образом, величину зоны нечувствительности релейного звена 19
Датчик 21 скорости вращения валков предыдущей клети служит для получения сигнала, пропорционального угловой скорости вращения валков этой клетио Он может быть выполнен, например, в виде импульсного датчика частоты вращения электродвигателя привода валков или в виде тахогене- ратора„
Система () содержит датчик 22 скорости движения металла, предназначенный для получения сигнала, пропорционального скорости движения головной части заготовки в межклетевом промежутке. Он может быть выполнен в виде вычислительного устройства, осуществляющего вычислительный процесс по формуле
Ум R, w,d + s,), (l)
где R1 и S .j - радиус валков предыдущей клети и опережение металла в этой клети. В таком случае датчик 22 скорости движения металла соединен своим первым входом с выходом датчика 21 ско-,
рости вращения валков (фиг01), а два других его входа предназначены для ввода в него информации о значеГ Г 3 UТ 1-ЧТТЈ1 T4ЈmrtatlT.I СТ
ниях радиуса К1 и опережения SY
10
15
Система (фиг01) содержит также задатчик 23 технологических параметров, представляющий собой набор источников 24-32 сигналов, пропорциональных значениям.технологических параметров, используемых в качестве заг- данных величин в алгоритмах работы других узлов системыо Источники 24- 30 сигналов, пропорциональных значениям межклетевого расстояния L, радиуса R1 валков предыдущей клети, опережения S, металла в предыдущей клети, ускорений и w7j валков предыдущей и последующей клетей, установленных задатчиками 6 и 7 интенсивности соответствующих клетей, начального приращения 4W2Hскорости вращения и заданного ускорения Сог валков последующей клети в режиме подготовки ее к захвату, соединены своими выходами со-25 ответственно с вторым - восьмым входами блока 20 установки зоны нечувствительности
Для достижения цели изобретения выполнены дополнительные соединения девятого - двенадцатого входов блока 20 установки зоны нечувствительности соответственно с выходами источника 15 сигнала задания скорости вращения
20
30
Источник 30 сигнала, пропорциональ ный значению u) { заданного ускорения валков последующей клети в режиме под готовки ее к захвату, соединен своим выходом также с вторым входом блока 12 формирования приращения скорости„
Источник 29 сигнала, пропорциональ ного значению /Зи)2|(начального приращения скорости вращения валков последующей клети, выполнен в виде суммирующего усилителя 33, соединенного первым и вторым входами с выходами соответственно первого 34 и второго 35 источников постоянного напряжения, причем выход первого из них соединен также с третьим входом блока 12 формирования приращения скорости.
Суммирующий усилитель 33 осуществляет формирование на своем выходе сигнала, пропорционального значению Л W H начального приращения с. соро- сти вращения валков последующей клети, физический смысл которого состоит в том, что угловая скорость вращения валков последующей клети непосред ственно перед началом режима подготовки ее к захвату должна быть на величину меньше расчетной скорости w2 3onffl захвата в этой клети (т.е„ угловой скорости со„ „ „ вращеV ЗОГД о
ния валков в начальный момент захвата) , Установкой соответствующих значений U.
и U напряжений на выхо- валков, задатчика 6 интенсивности дах соответственно первого 34 и вто- дыдущей клети и счетчика 17 импульсов
рого 35 источников постоянных напряжений производится задание начального приращения 4и 2нскорости, которое формируется суммирующим усилителем 33 в соответствии с формулой
и вторым выходом блока 12 формирования приращения скорости0
При принятом выполнении датчика 22 скорости движения металла в виде вычислительного устройства, реализующего вычисления по формуле (1), выходы источников 25 и 26 сигналов, пропорциональных значениям радиуса R1 валков предыдущей клети и опережения S металла в этой клети, соединены соответственно также с вторым и третьим входами датчика 22 скорости движения металлао
Источники 31 и 32 сигналов, про- порциональных значениям радиуса ВЦ валков последующей клети и абсолютного обжатия ДН в этой клети, содержащиеся в задатчике 23 технологических параметров, для достижения цели изобретения дополнительно соединены соответственно с четвертым и пятым входами блока 12 формирования приращения скоростио
5
0
0
Источник 30 сигнала, пропорциональный значению u) { заданного ускорения валков последующей клети в режиме подготовки ее к захвату, соединен своим выходом также с вторым входом блока 12 формирования приращения скорости„
Источник 29 сигнала, пропорционального значению /Зи)2|(начального приращения скорости вращения валков последующей клети, выполнен в виде суммирующего усилителя 33, соединенного первым и вторым входами с выходами соответственно первого 34 и второго 35 источников постоянного напряжения, причем выход первого из них соединен также с третьим входом блока 12 формирования приращения скорости.
Суммирующий усилитель 33 осуществляет формирование на своем выходе сигнала, пропорционального значению Л W H начального приращения с. соро- сти вращения валков последующей клети, физический смысл которого состоит в том, что угловая скорость вращения валков последующей клети непосредственно перед началом режима подготовки ее к захвату должна быть на величину меньше расчетной скорости w2 3onffl захвата в этой клети (т.е„ угловой скорости со„ „ „ вращеV ЗОГД о
ния валков в начальный момент захвата) , Установкой соответствующих значений U.
и U напряжений на выхо- 5 дах соответственно первого 34 и вто-
и U напряжений на выхо- дах соответственно первого 34 и вто-
рого 35 источников постоянных напряжений производится задание начального приращения 4и 2нскорости, которое формируется суммирующим усилителем 33 в соответствии с формулой
(2)
лЧн к, и,
+
где К и К, - коэффициенты пропорциональности;
напряжения U, и Uorp выбраны положительными по знаку
Для достижения цели изобретения выполнены дополнительные соединения выходов второго источника 35 постоянного напряжения, датчик 22 скорости движения металла и задатчика 9 скорости вращения валков последующей клети, соответственно с шестым - восьмым входами блока 12 формирования приращения скорости
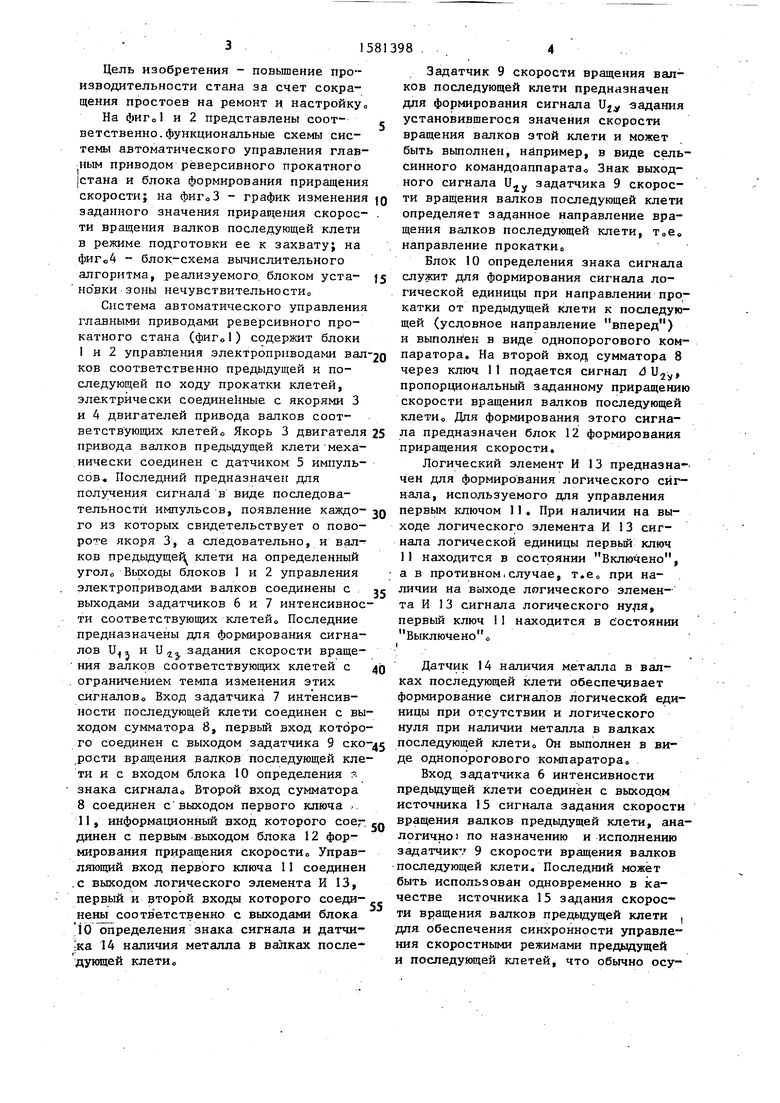
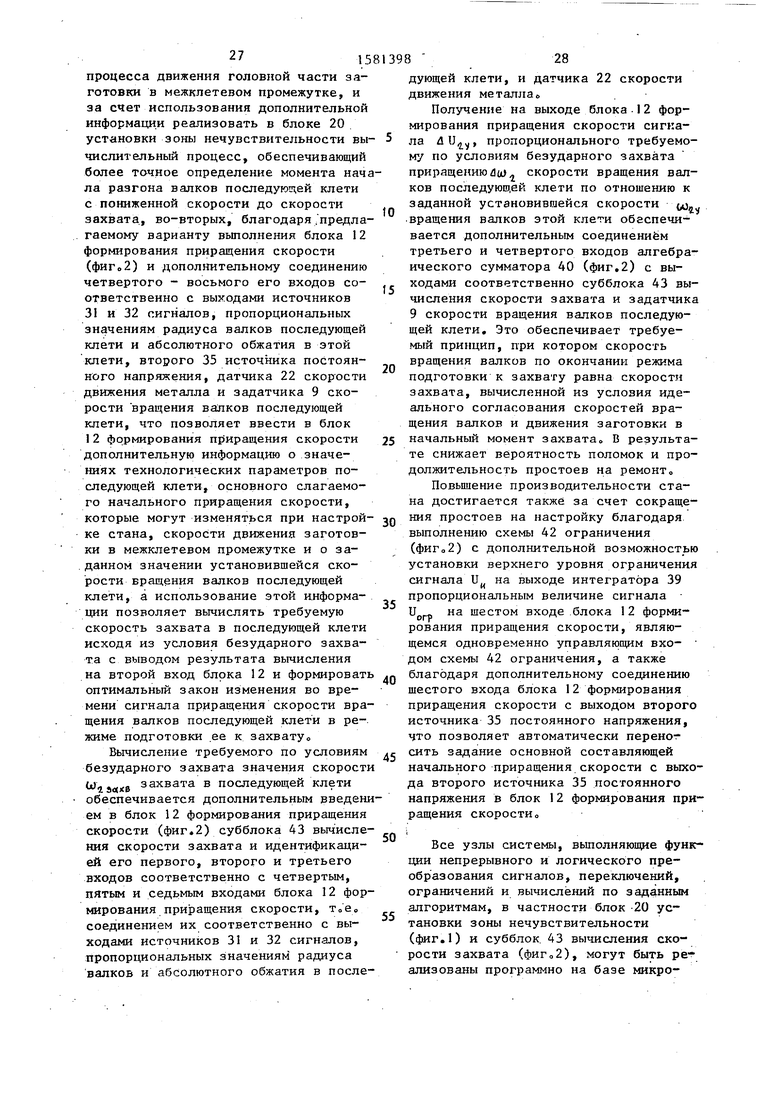
Блок 12 формирования приращения скорости (фиг02) содержит ключ 36 и переключатель 37, управляющие входы
10
15
20
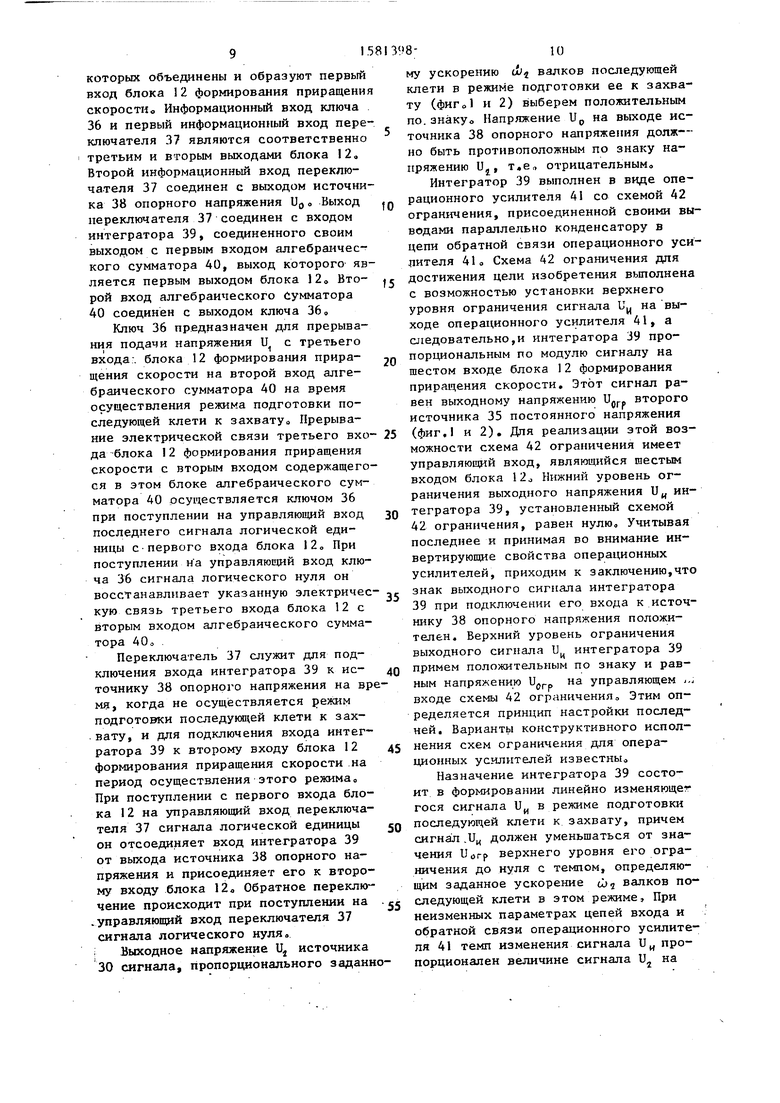
которых объединены и образуют первый вход блока 12 формирования приращения скоростио Информационный вход ключа 36 и первый информационный вход переключателя 37 являются соответственно третьим и вторым выходами блока 12, Второй информационный вход переключателя 37 соединен с выходом источника 38 опорного напряжения U0 , Выход переключателя 37 соединен с входом интегратора 39, соединенного своим выходом с первым входом алгебраического сумматора 40, выход которого является первым выходом блока 120 Второй вход алгебраического сумматора 40 соединен с выходом ключа 36,
Ключ 36 предназначен для прерывания подачи напряжения U с третьего входа блока 12 формирования приращения скорости на второй вход алгебраического сумматора 40 на время осуществления режима подготовки последующей клети к захватуо Прерывание электрической связи третьего вхо- 25 а блока 12 формирования приращения скорости с вторым входом содержащегося в этом блоке алгебраического сумматора 40 осуществляется ключом 36 при поступлении на управляющий вход последнего сигнала логической единицы с первого входа блока 12„ При поступлении на управляющий вход ключа 36 сигнала логического нуля он восстанавливает указанную электрическую связь третьего входа блока 12 с вторым входом алгебраического сумматора 40,
Переключатель 37 служит для подключения входа интегратора 39 к источнику 38 опорного напряжения на время, когда не осуществляется режим подготовки последующей клети к захвату, и для подключения входа интегратора 39 к второму входу блока 12 ормирования приращения скорости на ериод осуществления этого режима„ ри поступлении с первого входа блока 12 на управляющий вход переключателя 37 сигнала логической единицы он отсоединяет вход интегратора 39 от выхода источника 38 опорного напряжения и присоединяет его к второу входу блока 2а Обратное переклюение происходит при поступлении на правляющий вход переключателя 37 сигнала логического нуля
Выходное напряжение U4 источника 30 сигнала, пропорционального заданно4Q
50
30
35
45
55
10
15
20
25
му ускорению валков последующей клети в режиме подготовки ее к захвату (фиго и 2) выберем положительным по.знакуо Напряжение U0 на выходе источника 38 опорного напряжения долж-- но быть противоположным по знаку напряжению U4, т.ег, отрицательным.
Интегратор 39 выполнен в виде операционного усилителя 41 со схемой 42 ограничения, присоединенной своими выводами параллельно конденсатору в цепи обратной связи операционного усилителя 41 о Схема 42 ограничения для достижения цели изобретения выполнена с возможностью установки верхнего уровня ограничения сигнала Ь и на выходе операционного усилителя 41, а следовательно,и интегратора 39 пропорциональным по модулю сигналу на шестом входе блока 12 формирования приращения скорости. Этот сигнал равен выходному напряжению lLr-, второго источника 35 постоянного напряжения (фиг,1 и 2). Для реализации этой возможности схема 42 ограничения имеет управляющий вход, являющийся шестым входом блока 12., Нижний уровень ограничения выходного напряжения тегратора 39, установленный схемой 42 ограничения, равен нулю. Учитывая последнее и принимая во внимание инвертирующие свойства операционных усилителей, приходим к заключению,что знак выходного сигнала интегратора 39 при подключении его входа к источнику 38 опорного напряжения положителен. Верхний уровень ограничения выходного сигнала U интегратора 39
4Q примем положительным по знаку и равным напряжению U0 на управляющем ,., входе схемы 42 ограничения. Этим определяется принцип настройки последней. Варианты конструктивного исполнения схем ограничения для операционных усилителей известны.
Назначение интегратора 39 состоит в формировании линейно изменяющее гося сигнала UM в режиме подготовки
0 последующей клети к захвату, причем сигнал 11И должен уменьшаться от значения иогр верхнего уровня его ограничения до нуля с темпом, определяющим заданное ускорение валков последующей клети в этом режиме, При неизменных параметрах цепей входа и обратной связи операционного усилите30
35
45
5
ии инля 41 темп изменения сигнала ии пропорционален величине сигнала U2 на
втором входе блока 12 формирования приращения скорости
Для достижения цели изобретения алгебраический сумматор 40 соединен своим третьим входом с выходом дополнительно введенного субблока 43 вычисления скорости захвата, первый, второй и третий входы которого являются соответственно четвертым, пятьм и седьмым входами блока 12 формирования приращения скорости0 Кроме того, выход субблока 43 вычисления скорости захвата и четвертый вход алгебраического сумматора 40 являются соответственно вторым выходом и восьмым входом блока 12„
Субблок 43 вычисления скорости захвата предназначен для вычисления требуемого значения to- iax& скорости захвата в последующей клети по условию согласования скорости вращения валков этой клети со скоростью VM движения заготовки в межклетевом промежутке в начальный момент захвата, т,е0 по условию захвата без возникновения межклетевых усилий., Это необходимо для определения значения заданного приращения &ыг скорости вращения валков последующей клети в момент захвата, т.е0 при завершении процесса подготовки этой клети к захвату0 Субблок 43 вычисления скорости захвата осуществляет вычислительный процесс по известной формуле
.
W
R а -4На /2
(3)
где R.J и ЛН 2 - радиус валков последующей клети и значение абсолютного обжатия в ней.
При необходимости может быть введена коррекция значения oJz 3в(КВ заданной скорости захвата, статистически учитывающая характерное для данного стана искривление переднего конца заготовкио Это можно осуществить подачей корректирующего сигнала от отдельного источника на дополнительный вход алгебраического сумматора 40 либо субблока 43 вычисления скорости захвата,, В любом случае это равносильно увеличению значения W2 ъахй на небольшую величину формуле
. . ... ./,. N
т
бег
2 Ъ«ХЪ
Rt-&Нд/2
С помощью алгебраического сумматора 40 осуществляется формирование
5
0
5
0
5
0
5
0
5
заданного приращения скорости вращения валков как функции времени по формуле
dW2 w,ee|jfe-WIST,, -К2ии, (5)
Примем, что при направлении прокатки вперед, тОе0 от предыдущей клети к последующей, сигнал U4y задания установившейся скорости вращения валков последующей клети и выходной сигнал субблока 43 вычисления скорости захвата положительны по знаку о Тогда из формулы (5) с учетом знаков напряжений U, и UM заключаем, что третий вход алгебраического сумматора 40 является суммирующим, а его первый, второй и четвертый входы являются вычитающими
Блок 12 формирования приращения скорости (фиг„2) работает следующим образом. Когда сигнал на первом входе блока 12, а следовательно, и на управляющих входах ключа 36 и переключателя 37 имеет значение логического нуля, положительное по знаку напряжение U с третьего входа блока 12 подается через ключ 36 на второй вход алгебраического сумматора 40, а на вход интегратора 39 подается отрицательное по знаку напряжение U от источника 38 опорного напряжения через переключатель 37. На выходе интегратора 39 устанавливается максимальное положительное по знаку напряжение Uu, равное значению верхнего уровня ограничения выходного напряжения операционного усилителя 41 о Последний устанавливается с помощью схемы 42 ограничения и равен напряжению Uorp, поступающему на ее управляющий вход с шестого входа бло-. ка 12. Выходное напряжение Uиинтегратора 39 подается на первый вход алгебраического сумматора 40. Поскольку первый и второй входы последнего являются инвертирующими, суммированием сигналов Ц, и Uorp в алгебраическом сумматоре 40 формируется отрицательное по знаку значение начального приращения Л с гнскорости вращения валков последующей клети по формуле
К1и1 Кги„гр. - (6) На третий и четвертый входы алгебраического сумматора 40 поступают сигналы с выхода субблока 43 вычисления скорости захвата и восьмого входа блока 12. В результате на выходе
алгебраического сумматора, а следовательно, и на первом выходе блока 12 формируется сигнал All, t пропорциональный заданному приращению /Jw4 скорости врашения валков последующей клети по отношению к заданному значению W2y установившейся скорости их вращения Значение ашгприращения скорости определяется формулой (5) в общем J случае, а в рассматриваемой ситуации с учетом (6) формула (5) преобразуется к виду
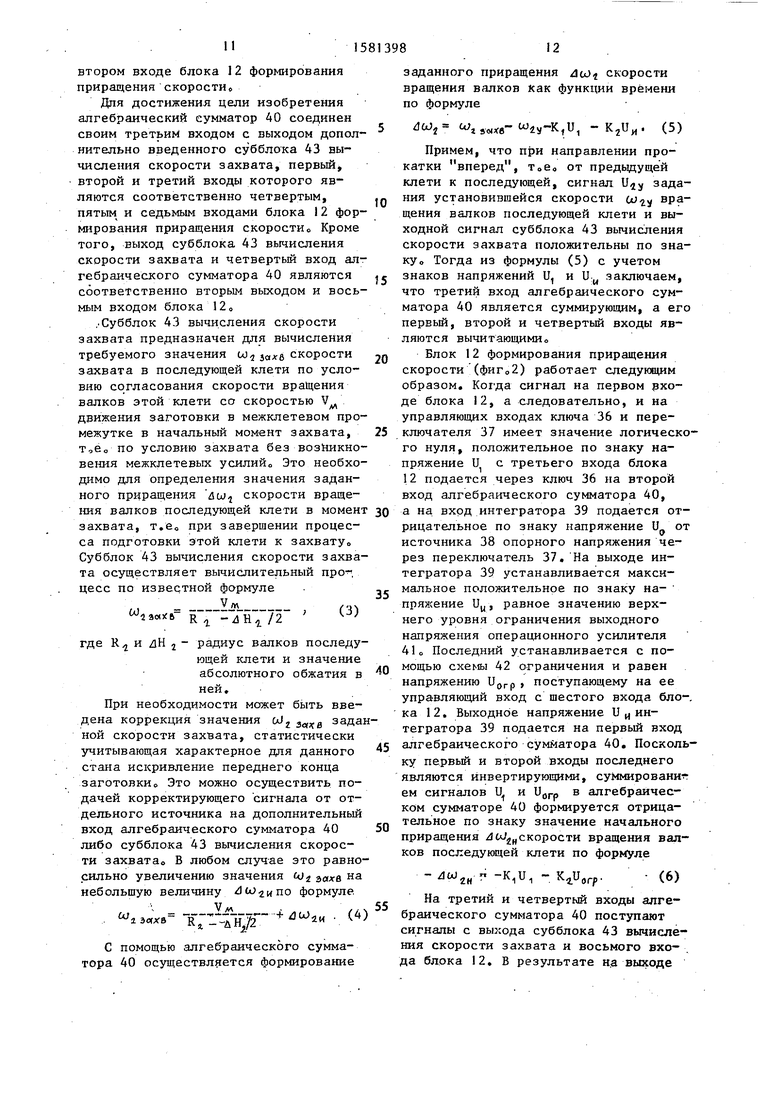
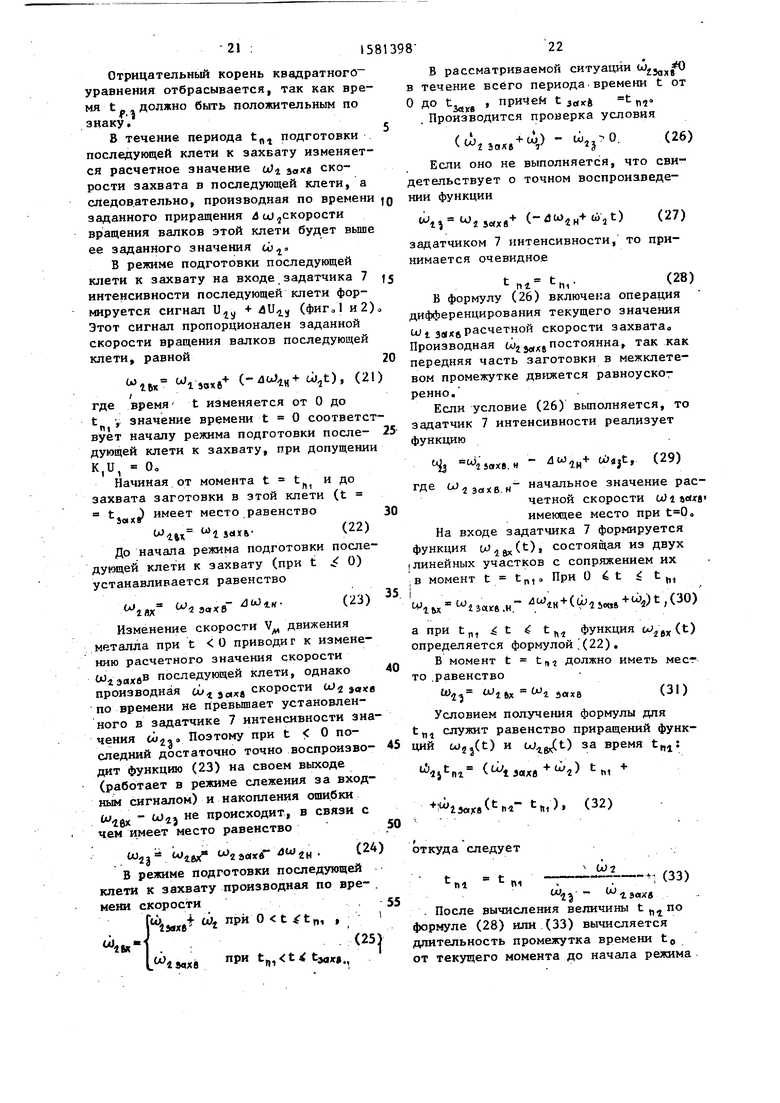
йшг ш Ч эахв W2 flWlM. (7) Описанное состояние блока 12 формирования приращения скорости сохраняется до момента времени tM (фиг„3), когда на первом входе блока 12 появляется сигнай логической единицы, что означает начало режима подготовки последующей клети к захвату Ключ 36 прерывает поступление сигнала U1 на второй вход алгебраического сумматора 40, и заданное значение Л1оаприращения скорости по модулю уменьшается на небольшую величину К,), , что способствует интенсивному закрытию зазоров в приводе валков последующей клетио Переключатель 37 отсоединяет вход интегратора 39 от источника 38 опорного напряжения и присоединяет его к второму входу блока 12, на который поступает положительный по знаку сигнал иг, пропорциональный заданному ускорению соя валков последующей клети в режиме подготовки ее к захвату. Сигнал ии на выходе интегра- тора уменьшается линейно до нуля, поскольку нижний уровень ограничения выходного напряжения операционного усилителя 41, установленный схемой 42 ограничения, равен нулю,, Темп изменения сигнала иц пропорционален напряжению иа„ Сигнал ДП гу на первом выходе блока 12 также изменяется линейно в предположении, что значения 1x14 л ах 6й Ш1 в Рбжиме подготовки последующей клети к захвату практически не изменяются, поскольку этот режим протекает кратковременно. В момент tj. окончания режима подготовки последующей клети к захвату на выходе блока 12 устанавливается сигнал dUZy пропорциональный приращению заданного (расчетного) значения скорос- ти захвата по отношению к заданному значению установившейся скорости W (фиг.З):
лсо7 W23erxft- w2y. (8)
Это состояние блока 12 формирования приращения скорости сохраняется до изменения значения сигнала на его первом входе с логической единицы на логический нуль, после чего блок 12 переходит в первоначальное состояние и формирует на своем первом выходе сигнал dlSty задания приращения du) скорости по формуле (7)
Система (фиг,1) работает следующим образом
Главные приводы предыдущей и последующей по ходу прокатки клетей стана приводят во вращение валки этих клетей с угловыми скоростями (д f и ojfl соответственно. Управление главными приводами осуществляется по цепям якорей 3 и 4 электродвигателей привода валков соответственно предыдущей и последующей клетей с помощью блоков 1 и 2 управления электроприводами валков соответствующих клетей. Задающими сигналами для блоков 1 и 2 управления электроприводами валков являются соответственно сигналы U., и иг- на дыходах задатчиков 6 и 7 интенсивности соответствующих клетей, пропорциональные заданным текущим значениям л),и w2, угловых скоростей вращения валков этих клетей С помощью задатчика 9 скорости вращения валков последующей клети и источника 15 сигнала задания скорости вращения валков предыдущей клети оператор задает значения ш и и установившейся скорости вращения валков соответствующих клетей о Сигналы задания указанных значений tu и ш1у угловых скоростей вращения валков подаются с выходов источника 15 сигнала задания скорости вращения валков предыдущей клети и задатчика 9 скорости вращения валков последующей клети соответственно на вход задатчика 6 интенсивности предыдущей клети и на первый вход сумматора 8, Если сигнал на втором входе сумматора 8 равен нулю,,то сигнал U1;) с его первого входа передается на вход задатчика 7 интенсивности последующей клети без изменения его значения Рассматриваемое направление прокатки будем условно считать направлением вперед. Примем, что при этом направлении прокатки выходные сигналы U1y источника
151
15 сигнала задания скорости вращения валков предыдущей клети,kU5a задат- чика 9 скорости вращения валков последующей клети, U,,j и U4y задат- чик ов 6 и 7 интенсивности соответственно предыдущей и последующей клетей положительны по знаку, С помощью задатчиков 6 и 7 интенсивности ограничивается темп изменения сигналов U,j и U2j задания текущих значений
и,, и ад скоростей вращения валков
на уровне заданных значений со/ и й)л
а 2
угловых ускорении валков соответствующих клетейо При скачкообразном (или достаточно интенсивном) изменении входного сигнала каждого из эадатчи- ков 6 и 7 интенсивности его выходной сигнал изменяется линейно с установленным в данном задатчике интенсивно ти темпом и ограничивается значением равным значению входного сигнала,,
За исходное состояние примем холостой ход стана при направлении прокатки вперед в момент времени,пред шествующий захвату заготовки валками предыдущей по ходу прокатки клети„Пр этом возможны ситуации, когда валки обоих клетей находятся в режиме раз
8
16
рость Ы, вращения последних (например, путем измерения частоты вращения якоря 3 электродвигателя привода валков этой клети), и сигнал, пропорциональный этой угловой скорости, поступает на первый вход блока 20 установки зоны нечувствительности, на одиннадцатый вход которого
с выхода счетчика 17 импульсов поступает сигнал, в рассматриваемом исходном состоянии равный нулю, а в общем случае пропорциональный углу w поворота валков предыдущей клети от начального положения последних, имеющего место в момент захвата ими заготовки. На девятый и десятый входы блока 20 установки зоны нечувствительности поступают сигналы U. и Ц с выходов соответственно источника 15 сигнала задания скорости вращения валков предыдущей клети и задатчика 6 интенсивности этой же клети, пропорциональные соответственно заданным установившемуся и текущему значениям tOjy и W14 угловой скорости вращения валков предыдущей клети. На двенадцатый вход блока 20 поступает сигнал, пропорциональный заданному значению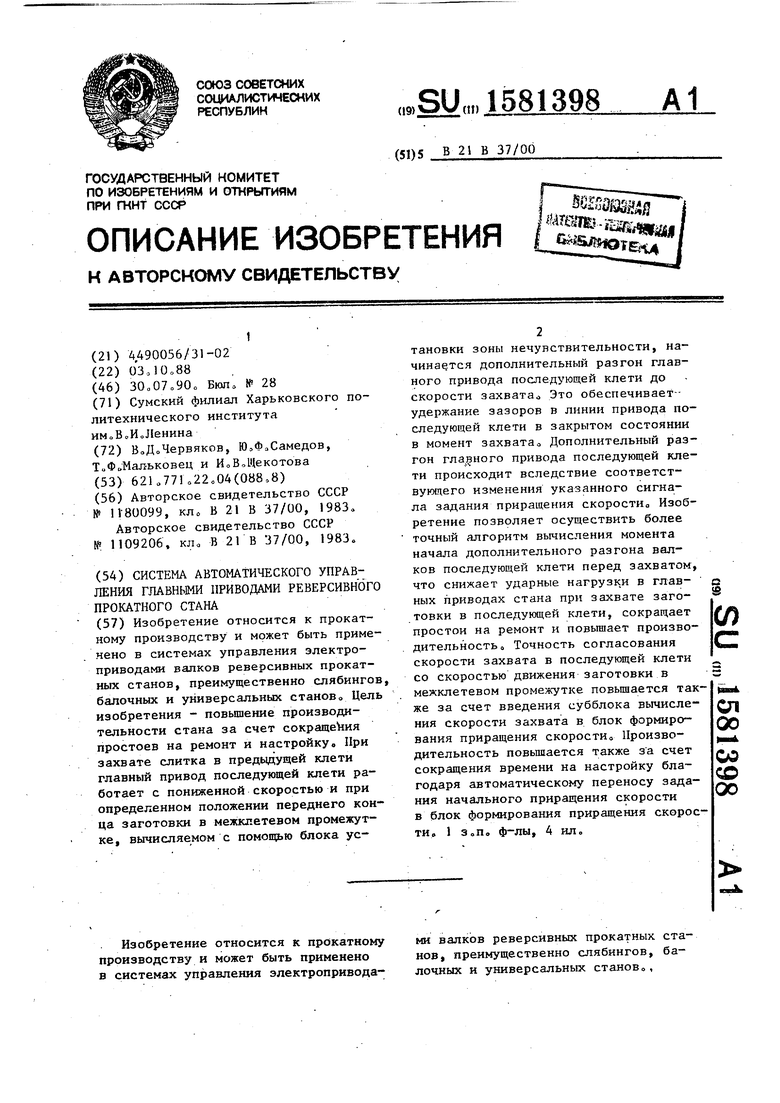
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство косвенного регулирования размеров проката в непрерывной группе клетей мелкосортно-проволочного стана | 1987 |
|
SU1414488A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Система регулирования натяжения раската в черновой группе клетей непрерывного прокатного стана | 1989 |
|
SU1708462A1 |
| Система автоматического управления поштучным редуцированием с натяжением на многоклетевом стане с индивидуальным электроприводом | 1985 |
|
SU1297959A1 |
| Устройство управления натяжением заготовок в многониточной непрерывной группе клетей мелкосортно-проволочного стана | 1985 |
|
SU1276388A1 |
| Устройство для регулирования толщины полосы | 1974 |
|
SU524580A1 |
| Система автоматического управления реверсивным прокатным станом | 1985 |
|
SU1268233A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ТЕХНОЛОГИЧЕСКОГО АГРЕГАТА | 1989 |
|
RU2011210C1 |
| Устройство регулирования натяжения полосы | 1981 |
|
SU939150A1 |
| Устройство для компенсации эксцентриситета валков прокатной клети | 1990 |
|
SU1704871A1 |
Изобретение относится к прокатному производству и может быть применено в системах управления электроприводами валков реверсивных прокатных станов, преимущественно слябингов, балочных и универсальных станов. Цель изобретения - повышение производительности стана за счет сокращения простоев на ремонт и настройку. При захвате слитка в предыдущей клети главный привод последующей клети работает с пониженной скоростью и при определенном положении переднего конца заготовки в межклетевом промежутке, вычисляемом с помощью блока установки зоны нечувствительности, начинается дополнительный разгон главного привода последующей клети до скорости захвата. Этим обеспечивается удержание зазоров в линии привода последующей клети в закрытом состоянии в момент захвата. Дополнительный разгон главного привода последующей клети происходит вследствие соответствующего изменения упомянутого сигнала задания приращения скорости. Изобретение позволяет осуществить более точный алгоритм вычисления момента начала дополнительного разгона валков последующей клети перед захватом, что снижает ударные нагрузки в главных приводах стана при захвате заготовки в последующей клети, сокращает простои на ремонт и повышает производительность. Точность согласования скорости захвата в последующей клети со скоростью движения заготовки в межклетевом промежутке повышается также за счет введения субблока вычисления скорости захвата в блок формирования приращения скорости. Производительность повышается также за счет сокращения времени на настройку благодаря автоматическому переносу задания начального приращения скорости в блок формирования приращения скорости. 1 з.п. ф-лы, 4 ил.
гона с угловыми ускорениями 1}30 wi эахв скорости захвата в последуюсоответственно или вращаются в установившемся режиме Возможна ситуация, когда валки предыдущей клети вращаются с ускорением, а последующей клети ростью, равной W14- 4W4, где 4Ш2 заданное блоком 12 приращение скорости.
В исходном состоянии сигналы на выходах датчиков 18 и 14 наличия ме- Q талла в валках предыдущей и последующей клетей имеют значения логических нуля и единицы соответственно,, Сигнал логического нуля поступает на управляющий вход второго ключа 16 и на 45 вход установки нуля счетчика 17 импульсов, при этом второй ключ 16 разомкнут, а счетчик 17 импульсов находится в состоянии обнуления его выхода, т.е. выходной сигнал счетчика 5Q 17 импульсов в этом состоянии равен нулю0 Датчик 5 импульсов подает на информационный вход второго ключа 16 импульсные сигналы, период следоващей клети, вычисленному в блоке 12 формирования приращения скорости,, На второй - восьмой входы блока 20 поступают сигналы с выходов соответстс установившейся пониженной ско- 35 венно источников 24-30 задатчика 23
технологических параметров Эти сигналы пропорциональны соответственно межклетевому расстоянию L, радиусу R валков предыдущей клети и опережению S, металла в этой клети, значениям u 4 угловых ускорений валков предыдущей и последующей клетей, установленных в задатчиках 6 и 7 интенсивности соответствующих клетей, значениям dWlH начального приращения скорости и заданного ускорения валков последующей клети в режиме под- готовки ее к захвату0
Управление станом организуется таким образом, что соотношение заданных значений и)1у и coiy угловых скоростей вращения валков предыдущей и последующей клетей обеспечивает одновременную прокатку слитка в этих клетях без возникновения межклетевого усилия. Захват . слитка в последукг-- щей клети необходимо осуществлять в и ,процессе разгона валков этой клети с
ния которых пропорционален определенному квантованному значению угла поворота валков предыдущей клети. Датчик 21 скорости вращения валков предыдущей клети измеряет угловую ско55
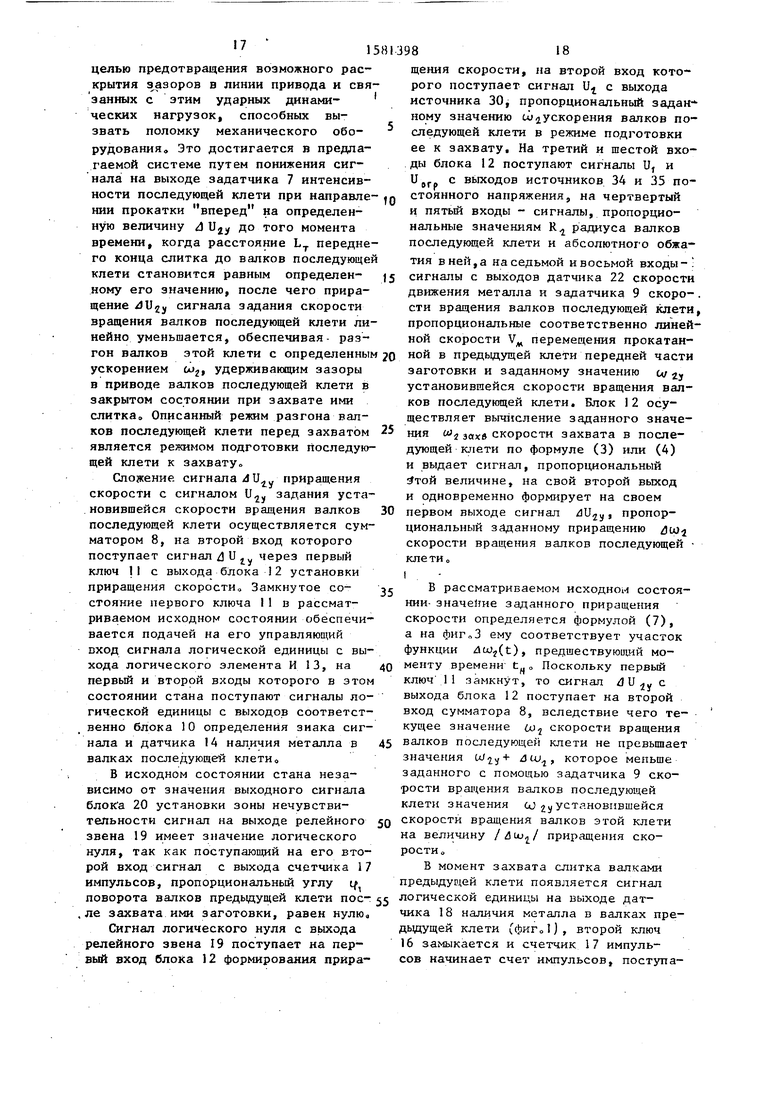
wi эахв скорости захвата в последующей клети, вычисленному в блоке 12 формирования приращения скорости,, На второй - восьмой входы блока 20 поступают сигналы с выходов соответстцелью предотвращения возможного раскрытия зазоров в линии привода и связанных с этим ударных динами- ческих нагрузок, способных вызвать поломку механического оборудования. Это достигается в предлагаемой системе путем понижения сиг- нала на выходе задатчика 7 интенсивности последующей клети при направлении прокатки вперед на определенную величину A U2y до того момента времени, когда расстояние LT переднего конца слитка до валков последующей клети становится равным определен- ному его значению, после чего приращение JUjy сигнала задания скорости вращения валков последующей клети линейно уменьшается, обеспечивая- разгон валков этой клети с определенным PQ ной в предыдущей клети передней части
ускорением , удерживающим зазоры в приводе валков последующей клети в закрытом состоянии при захвате ими слитка Описанный режим разгона валков последующей клети перед захватом 25 является режимом подготовки последующей клети к захвату
Сложение сигнала ЛUiy приращения скорости с сигналом U2y задания установившейся скорости вращения валков 30 последующей клети осуществляется сумматором 8, на второй вход которого поступает сигнал 4 U через первый ключ 1I с выхода блока 12 установки приращения скорости,. Замкнутое со- 35 стояние первого ключа 11 в рассматриваемом исходном состоянии обеспечивается подачей на его управляющий вход сигнала логической единицы с выхода логического элемента И 13, на 40 первый и второй входы которого в этом состоянии стана поступают сигналы логической единицы с выходов соответственно блока 10 определения знака сигнала и датчика 14 наличия металла в 45 валках последующей клети0
В исходном состоянии стана независимо от значения выходного сигнала блок а 20 установки зоны нечувствительности сигнал на выходе релейного 50 звена 19 имеет значение логического нуля, так как поступающий на его второй вход сигнал с выхода счетчика 17 импульсов, пропорциональный углу
заготовки и заданному значению и установившейся скорости вращения ков последующей клети. Блок 12 ос ществляет вычисление заданного зн ния w23«xft скорости захвата в пос дующей клети по формуле (3) или ( и выдает сигнал, пропорциональный величине, на свой второй вых и одновременно формирует на своем первом выходе сигнал dU2y, пропо циональный заданному приращению скорости вращения валков последую клети о I
В рассматриваемом исходном сос нии- значение заданного приращения скорости определяется формулой (7 а на фиг„3 ему соответствует учас функции AWj(t ), предшествующий м менту времени t , Поскольку первый ключ 11 замкнут, то сигнал с выхода блока 12 поступает на второ вход сумматора 8, вследствие чего кущее значение бо2 скорости вращен валков последующей клети не превыш значения Wjy+ которое меньш заданного с помощью задатчика 9 ск рости вращения валков последующей клети значения со 2уустановившейся скорости вращения валков этой клет на величину / приращения скорости о
В момент захвата слитка валками предыдущей клети появляется сигнал
поворота валков предыдущей клети пос- 55 логической единицы на выходе датчика IS наличия металла в валках п дыдущей клети (фиг01), второй ключ 16 замыкается и счетчик 17 импульсов начинает счет импульсов, посту
. ле захвата ими заготовки, равен нулю,
Сигнал логического нуля с выхода релейного звена 19 поступает на первый вход блока 12 формирования приращения скорости, на второй вход которого поступает сигнал U4 с выхода источника 30, пропорциональный задан-- ному значению со ускорения валков последующей клети в режиме подготовки ее к захвату. На третий и шестой входы блока 12 поступают сигналы U, и
U
ОГр
с выходов источников 34 и 35 постоянного напряжения, на чертвертый и пятый входы - сигналы, пропорциональные значениям R радиуса валков последующей клети и абсолютного обжатия вней,а на седьмой ивосьмой входы- сигналы с выходов датчика 22 скорости движения металла и задатчика 9 скоро-. сти вращения валков последующей клети, пропорциональные соответственно линейной скорости VM перемещения прокатанзаготовки и заданному значению и/ 2j установившейся скорости вращения валков последующей клети. Блок 12 осуществляет вычисление заданного значения w23«xft скорости захвата в последующей клети по формуле (3) или (4) и выдает сигнал, пропорциональный величине, на свой второй выход и одновременно формирует на своем первом выходе сигнал dU2y, пропорциональный заданному приращению u)j скорости вращения валков последующей клети о I
В рассматриваемом исходном состоянии- значение заданного приращения скорости определяется формулой (7), а на фиг„3 ему соответствует участок функции AWj(t ), предшествующий моменту времени t , Поскольку первый ключ 11 замкнут, то сигнал с выхода блока 12 поступает на второй вход сумматора 8, вследствие чего текущее значение бо2 скорости вращения валков последующей клети не превышает значения Wjy+ которое меньше заданного с помощью задатчика 9 скорости вращения валков последующей клети значения со 2уустановившейся скорости вращения валков этой клети на величину / приращения скорости о
В момент захвата слитка валками предыдущей клети появляется сигнал
логической единицы на выходе датчика IS наличия металла в валках предыдущей клети (фиг01), второй ключ 16 замыкается и счетчик 17 импульсов начинает счет импульсов, поступающих на его счетный вход с выхода датчика 5 импульсовв Число этих импульсов пропорционально углу tf, поворота валков предыдущей клети с на- чалом отсчета этого угла в момент захвата. В результате на выходе счетчика 17 импульсов формируется сигнал, пропорциональный углу if о
Одновременно с началом счета им- пульсов счетчиком 17 начинается вычислительный процесс в блоке 20 установки зоны нечувствительности. Этот момент распознается по результату проверки условия
4,0 .(9)
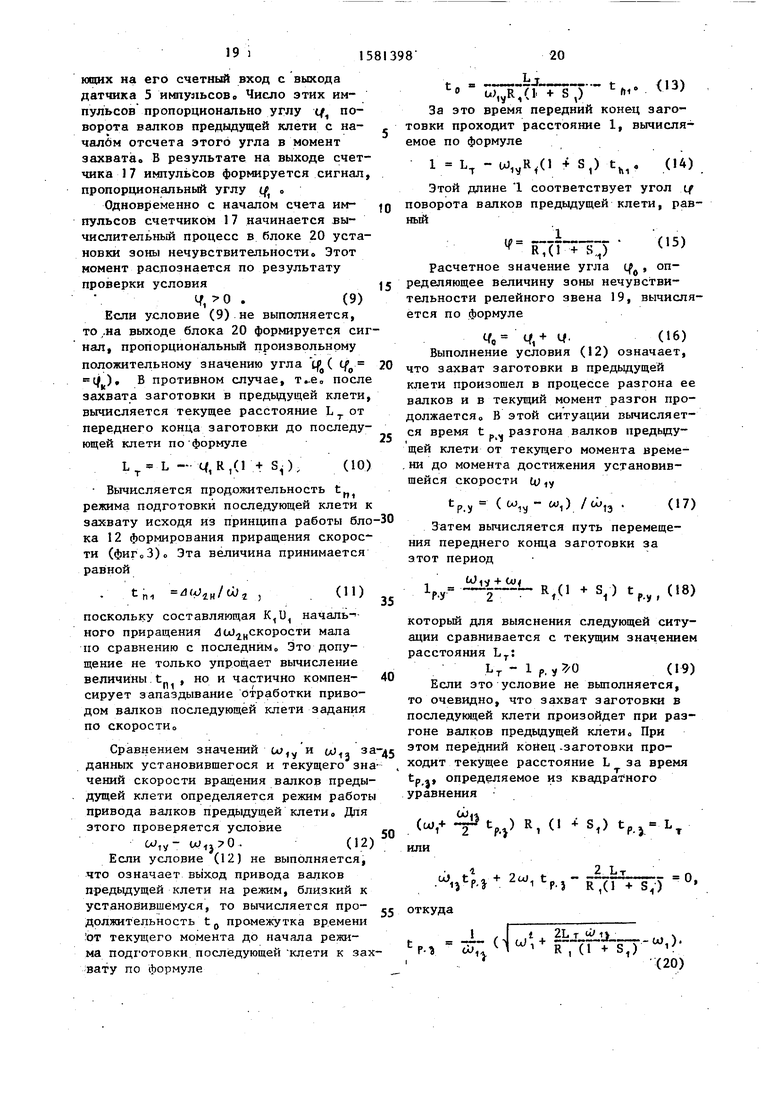
Если условие (9) не выполняется, то .на выходе блока 20 формируется сигнал, пропорциональный произвольному положительному значению угла if ( Lfg lf ), В противном случае, после захвата заготовки в предыдущей клети, вычисляется текущее расстояние L т от переднего конца заготовки до последующей клети по формуле
LT L - 4,R,0 + S,)(Ю)
Вычисляется продожительность tni режима подготовки последующей клети к захвату исходя из принципа работы бло-30 ка 12 формирования приращения скорости (фиг,3)о Эта величина принимается равной
t(0 cf,+ I. (16) Выполнение условия (12) означает, что захват заготовки в предыдущей клети произошел в процессе разгона ее валков и в текущий момент разгон продолжается о В этой ситуации вычисляется время t р„ разгона валков предыдущей клети от текущего момента времени до момента достижения установившейся скорости tu iy
tP.y Wiy wi 17 Затем вычисляется путь перемещения переднего конца заготовки за этот период
/)W1H/w
г , -- 35
поскольку составляющая К,), началь- ного приращения 4Ы1нскорости мала но сравнению с последним„ Это допущение не только упрощает вычисление величины t , но и частично компен- 40 сирует запаздывание отработки приводом валков последующей клети задания по скоростио
Сравнением значений си1у и oJ13 данных установившегося и текущего значений скорости вращения валков предыдущей клети определяется режим работы привода валков предыдущей клети Для этого проверяется условие
on 35 Vs I™- fo + v t( (is)
50
который для выяснения следующей ситуации сравнивается с текущим значением расстояния LT:
LT - 1 p. y 7/0 (19) Если это условие не выполняется, то очевидно, что захват заготовки в последующей клети произойдет при разгоне валков предыдущей клети0 При этом передний конец -заготовки проходит текущее расстояние L за время tp-, определяемое из квадратного уравнения
) R, (1 St) t LT
W,v -
1У
1J,
(12)
Если условие (12) не выполняется, что означает выход привода валков предыдущей клети на режим, близкий к установившемуся, то вычисляется продолжительность tQ промежутка времени от текущего момента до начала режима подготовки последующей клети к захвату по формуле
LJ г
Ы,„И,(1 + S,) bf
13)
За это время передний конец заготовки проходит расстояние 1, вычисляемое по формуле
1 Ц - u)1vM + S,) tfcl. (14)
Этой длине 1 соответствует угол if поворота валков предыдущей клети, равный
1
If:
R,(i + s)
(15)
оп
Расчетное значение угла cf , ределяющее величину зоны нечувствительности релейного звена 19, вычисляется по формуле
t(0 cf,+ I. (16) Выполнение условия (12) означает, что захват заготовки в предыдущей клети произошел в процессе разгона ее валков и в текущий момент разгон продолжается о В этой ситуации вычисляется время t р„ разгона валков предыдущей клети от текущего момента времени до момента достижения установившейся скорости tu iy
tP.y Wiy wi 17 Затем вычисляется путь перемещения переднего конца заготовки за этот период
который для выяснения следующей ситуации сравнивается с текущим значением расстояния LT:
LT - 1 p. y 7/0 (19) Если это условие не выполняется, то очевидно, что захват заготовки в последующей клети произойдет при разгоне валков предыдущей клети0 При этом передний конец -заготовки проходит текущее расстояние L за время tp-, определяемое из квадратного уравнения
) R, (1 St) t LT
или
2 LT
. + 2uJi 4} - ) - °
откуда
M-3irt ..г(20)
21
Отрицательный корень квадратного уравнения отбрасывается, так как время t- должно быть положительным по знаку.
В течение периода tnt подготовки последующей клети к захвату изменяется расчетное значение авхв скорости захвата в последующей клети, а следовательно, производная по времени заданного приращения 4 а,скорости вращения валков этой клети будет выше ее заданного значения сог,
В режиме подготовки последующей клети к захвату на входе задатчика 7 интенсивности последующей клети формируется сигнал U1;/ + (фиг,1 и 2) Этот сигнал пропорционален заданной скорости вращения валков последующей клети, равной
15
где Ч,
гыГ (-ли)1н+tV), UO время- t изменяется от 0 до -, значение времени t 0 соответствует началу режима подготовки после- 25 дующей клети к захвату, при допущении
K.U,
Оа
Начиная от момента t t и до захвата заготовки в этой клети (t
) имеет место равенство
wnx ы d)fb До начала режима подготовкдующей клети к захвату (при t устанавливается равенство
СА
г ял
эахв-
Изменение скорости V движения металла при t 0 приводит к изменению расчетного значения скорости С01эахвв последующей клети, однако производная Sc)xe скорости по времени не превышает установленного в задатчике 7 интенсивности значения с«2,о Поэтому при t О последний достаточно точно воспроизводит функцию (23) на своем выходе (работает в режиме слежения за входным сигналом) и накопления ошибки Ы1вх - со2л не происходит, в связи с чем имеет место равенство
W4ftXa W23«x T 4W2H
(24)
В режиме подготовки последующей клети к захвату производная по аре- . мени скорости55
4W Wt при О t tn, ,
(25) .We при tni tit3exe.,
wite1581398-22
В рассматриваемой ситуации в течение всего периода времени t от О до t, . . , причем t «,. t
-3«Хв ПРИЧеМ С Зйхй -- П9.
Производится проверка условия
гэохв+ч) W,
О
(26)
-,, --«J
Если оно не выполняется, что свидетельствует о точном воспроизведении функции
WM-w,5elxe+ (-dw4H+ioat)
(27)
задатчиком 7 интенсивности, то принимается очевидное
tnt th,
В формулу (26) включена операция
дифференцирования текущего значения uit 3c,Xft расчетной скорости захвата0 Производная to j gпостоянна, так как передняя часть заготовки в межклетевом промежутке движется равноускоренно.
Если условие (26) выполняется, то задатчик 7 интенсивности реализует функцию
w,
1 sex, н
- &tjt,
(29)
где зочсви начальное значение расчетной скорости u)iaeue имеющее место при На входе задатчика 7 формируется функция Wlftx(t), состоящая из двух iлинейных участков с сопряжением их
в момент t
nt
При 0 6 t t
tii
WIM Ш1 S«K« .н,- ли)1н + (аю« +Ч) t,(30)
а при tnt t th функция (t) определяется формулой ,(22) .
В момент t tnt должно иметь мест то равенство
ш шгь wi з«хв (31)
Условием получения формулы для tn,j служит равенство приращений функций (t) и wigx(t) за время tnl:
4ьпа
(t3«xe+) м +
50
+™гаа Ъм- Ч,). (32)
откуда следует
W2
шл
г-- (зз)
- w.
по
П1u IM
/4Z гзахл . После вычисления величины t
ii i,
формуле (28) или (33) вычисляется длительность промежутка времени t0 от текущего момента до начала режима
подготовки последующей клети к захвату по формуле
г
- t
щ(34)
За время t передний конец заготовки проходит расстояние 1, вычисляемое по формуле
1 -(«,+ te) R,(l + S()
в
(35)
Далее вычисляются значения углов tf и Ц по формулам (15) и (16)
Если условие (19) выполняется, очевидно, что захват заготовки в последующей клети произойдет после выхода главного привода предыдущей клети на установившуюся скорость« Время движения переднего конца заготовки на установившейся скорости до захвата ее в последующей клети определяется по формуле
L ,т 1 p-sf 5 w R/r+X)
(36)
Это время сопоставляется с вреенем режима подготовки последующей клети к захвату путем проверки условия
ЧГ ш7 0- (37)
Если условие (37)- выполняется, то очевидно, что привод валков предыдуей клети выйдет на установившуюся скорость до начала режима подготовки последующей клети к захвату, а проолжительность последнего будет равна th1 , поскольку значение ( 3efxe в этом режиме в данной ситуации не будет изменяться (как и в первой ситуации) В этой ситуации величины 1, if и ц вычисляются последовательно по формулам (14) - (16)0
Если условие (37) не выполняется, то режим подготовки последующей клети к захвату должен начаться до выхода главного привода предыдущей клети на становившуюся скорость0 В этом случае производится проверка условия (26). Если оно не выполняется, то родолжительность tB. - режима подготовки последующей клети к захвату принимается равной
°Э
П1
(38)
Здесь время t0 от текущего момента до начала процесса подготовки последующей клети к захвату равно
- t.I. (39)
fcp. ЬУ.Э
nji
где tft- - продолжительность режима подготовки последующей клети к захвату в данной ситуации.
Далее вычисляются величины 1, if и (/в по формулам (35), (15) и (16),,.
Если условие (26) выполняется, то в режиме подготовки последующей клети к захвату задатчик 7 интенсивности
формирует на своем выходе линейную функцию (29), а на его входе формируется функция textt) состоящая из трех участков. На первом из них длительностью tn, функция Wjpex(t) имеет
5 вид (30), а на втором и третьем участках она определяется формулой (22), причем длительность третьего участка равна ty . Условием получения формулы для tnj служит равенство приращений
0 функции ) и W4ex(t) за время
ч:
) -fc m +
(40)
5
IM «-HJ
Из (38) получаем формулу для вычисления tn3 в данной ситуации:
Из
.fi&Lul JZJЈi.2s.i.t JL САП . . Лц 1)
ш,
2} a eiite После вычисления величины t
из
вы5
0
5
0
5
числяются последовательно величины t0, I , if и соответственно по формулам (39), (35), (15) и (16).
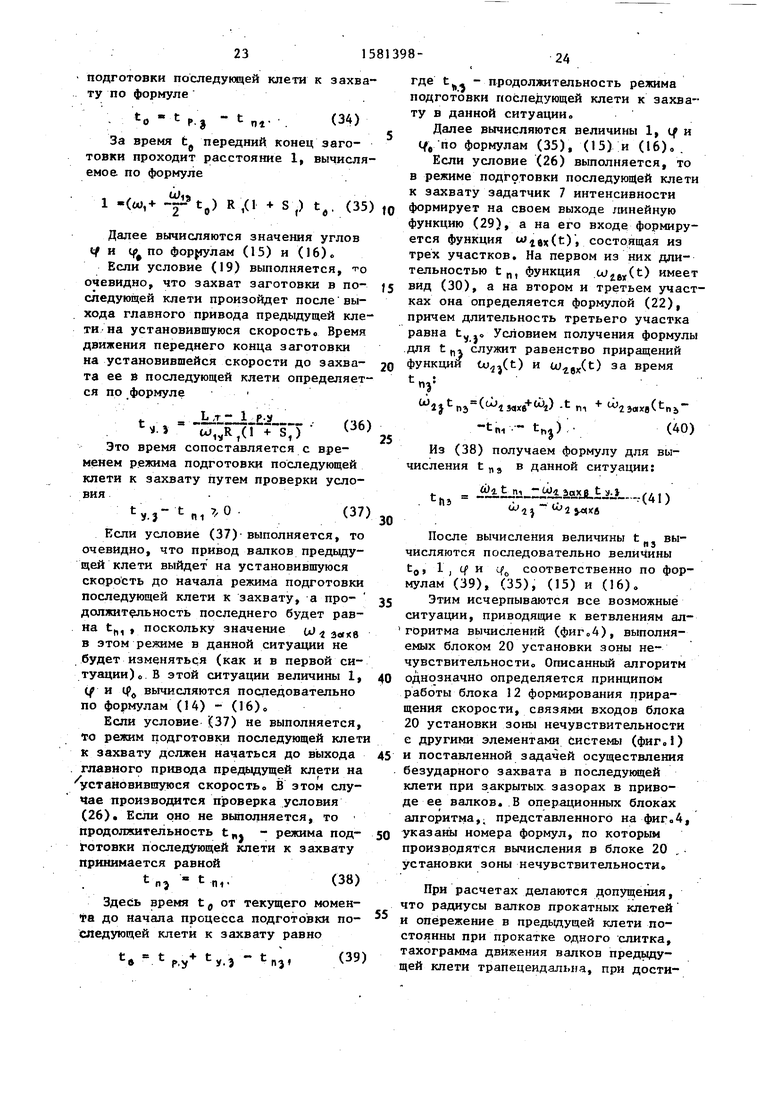
Этим исчерпываются все возможные ситуации, приводящие к ветвлениям ал- 1 горитма вычислений (фиг04), выполняемых блоком 20 установки зоны нечувствительности., Описанный алгоритм однозначно определяется принципом работы блока 12 формирования приращения скорости, связями входов блока 20 установки зоны нечувствительности с другими элементами системы () и поставленной задачей осуществления безударного захвата в последующей клети при закрытых зазорах в приводе ее валков. В операционных блоках алгоритма,, представленного на , указаны номера формул, по которым производятся вычисления в блоке 20 , установки зоны нечувствительности
При расчетах делаются допущения, что радиусы валков прокатных клетей и опережение в предыдущей клети постоянны при прокатке одного слитка, тахограмма движения валков предыдущей клети трапецеидальна, при дости25
жении равенства выходного и входного сигн лов U и U1y задатчика 6 интенсивности предыдущей клети валки этой клети вращаются с установившейся скоростью, пренебрежимо мало отличающейся от заданного установившегося значения их скорости w , заполнение очага- деформации в предыдущей клети происходит мгновенно Эти допущения вносят некоторую погрешность в результате вычисления расчетного угла (fo , которая может быть частично скомпенсирована подстройкой
5
выходного сигнала источника 24 сигна- . с предыдущей клети размыкается второй
. f .
ла, пропорционального межклетевому расстоянию L, имеющегося в задатчике 23 технологических параметров
Непрерывное или повторяющееся с высокой частотой выполнение этого алгоритма позволяет учитывать одну из главных составляющих ошибки при определении расчетного угла , связанную с тем, что из-за колебаний нагруз20
ключ 16 и сбрасывается на нуль счетчик 17 импульсов. Сигнал на выходе релейного эвена 19 принимает значение логического нуля, блок 12 форми рования приращения скорости приходи в исходное состояние
Преимущество предлагаемой системы по сравнению с известными состоит в том, что при ограничении величины ус корения в приводе валков последующей клети повышается надежность удержания зазоров в этом приводе в закрытом состоянии в процессе заполнения очага деформации в последующей клети за счет более точного согласования скорости вращения валков этой клети со скоростью движения заготовки в ме клетевом промежутке и связанного с этим уменьшения кинетической энергии передаваемой заготовкой валкам данной клети при захвате При использовании предлагаемой системы снижаются динамические нагрузки в главных приводах стана, что приводит к росту
ки тахограмма движения валков предыдущей клети отличается от трапецеидальной формы
Сигнал, пропорциональный расчетному углу Lfe , формируется на выходе блока 20 установки зоны нечувствительности () и подается на первый вход релейного звена 19 с регулируемой зоной нечувствительности
В момент совпадения величин ц( и на выходе релейного звена 19 появляется сигнал логической единицы, выходной сигнал dUly блока 12 формирования приращения скорости начинает апгебраически увеличиваться ()0
Начинается режим подготовки последую- о производительности за счет сокращения
щей клети к захвату, подробно рассмотренный при составлении алгоритма вычислений в блоке 20 установки зоны нечувствительности
Сигнал U 4 v +Ли4„ на выходе сумма-д тевом промежутке повышается по сравтора 8 увеличивается скачком на небольшую величину, определяемую напряжением U первого источника 34 постоянного напряжения, а затем увеличинению с известными системами, во-первых, благодаря дополнительному соединению девятого - двенадцатого входов блока 22 установки зоны нечувствитель
вается, устремляясь к значению, опре- CQ ности соответственно с выходами ис- деляющему требуемую скорость и) ЭЯхв захвата в последующей клети по условию безударного захвата Под действием скачка сигнала на выходе сумматора 8 происходит закрытие зазоров в приводе валков последующей клети, а постоянный разгон поддерживает зазоры в закрытом состоянии Захват металла валками последующей клети происходит
55
точника 15 сигнала задания скорости вращения валков, задатчика 6 интенси ности предыдущей клети и счетчика 17 импульсов и с вторым входом блока 12 формирования приращения скорости,что позволяет ввести в блок 20 установки зоны нечувствительности дополнительную информацию, необходимую для ситу ационного анализа и прогнозирования
8 39826
при скорости вращения последних, близкой к расчетной скорости захвата В момент захвата сигнал на выходе датчика 14 наличия металла в валках последующей клети принимает значение логического нуля, первый ключ 11 размыкается и на вход задатчика 7 интенсивности поступает только напряжение управления , обеспечивающее требуемое согласование скоростей вращения валков смежных клетей при одновременной прокатке заготовки
После выхода заготорки из валков
10
f .
ключ 16 и сбрасывается на нуль счетчик 17 импульсов. Сигнал на выходе релейного эвена 19 принимает значение логического нуля, блок 12 формирования приращения скорости приходит в исходное состояние
Преимущество предлагаемой системы по сравнению с известными состоит в том, что при ограничении величины ускорения в приводе валков последующей клети повышается надежность удержания зазоров в этом приводе в закрытом состоянии в процессе заполнения очага деформации в последующей клети за счет более точного согласования скорости вращения валков этой клети со скоростью движения заготовки в межклетевом промежутке и связанного с этим уменьшения кинетической энергии, передаваемой заготовкой валкам данной клети при захвате При использовании предлагаемой системы снижаются динамические нагрузки в главных приводах стана, что приводит к росту
производительности за счет сокращения
затрат времени на ремонт оборудования. Точность согласования скорости вращения валков последующей клети со скоростью движения заготовки в межкленению с известными системами, во-первых, благодаря дополнительному соединению девятого - двенадцатого входов блока 22 установки зоны нечувствитель-
ности соответственно с выходами ис-
точника 15 сигнала задания скорости вращения валков, задатчика 6 интенсивности предыдущей клети и счетчика 17 импульсов и с вторым входом блока 12 формирования приращения скорости,что позволяет ввести в блок 20 установки зоны нечувствительности дополнительную информацию, необходимую для ситуационного анализа и прогнозирования
процесса движения головной части заготовки в межклетевом промежутке, и за счет использования дополнительной информации реализовать в блоке 20 установки зоны нечувствительности вычислительный процесс, обеспечивающий более точное определение момента начла разгона валков последующей клети с пониженной скорости до скорости захвата, во-вторых, благодаря . предлагаемому варианту выполнения блока 12 формирования приращения скорости (фиг02) и дополнительному соединению четвертого - восьмого его входов соответственно с выходами источников 31 и 32 сигналов, пропорциональных значениям радиуса валков последующей клети и абсолютного обжатия в этой клети, второго 35 источника постоянного напряжения, датчика 22 скорости движения металла и задатчика 9 скорости вращения валков последующей клети, что позволяет ввести в блок 12 формирования приращения скорости дополнительную информацию о значениях технологических параметров последующей клети, основного слагаемого начального приращения скорости,
которые могут изменяться при настрой- зд ния простоев на настройку благодаря
выполнению схемы 42 ограничения (фиго2) с дополнительной возможность установки верхнего уровня ограничени сигнала UM на выходе интегратора 39 пропорциональным величине сигнала И на шестом входе блока 12 формирования приращения скорости, являющемся одновременно управляющим вхо- дом схемы 42 ограничения, а также благодаря дополнительному соединению шестого входа блока 12 формирования приращения скорости с выходом второг источника 35 постоянного напряжения, что позволяет автоматически переносить задание основной составляющей начального приращения скорости с вых да второго источника 35 постоянного напряжения в блок 12 формирования пр ращения скоростио
ке стана, скорости движения заготовки в межклетевом промежутке и о заданном значении установившейся скорости вращения валков последующей клети, а использование этой информации позволяет вычислять требуемую скорость захвата в последующей клети исходя из условия безударного захвата с выводом результата вычисления на второй вход блока 12 и формировать оптимальный закон изменения во времени сигнала приращения скорости вращения валков последующей клети в режиме подготовки ее к захвату0
Вычисление требуемого по условиям безударного захвата значения скорости (j4 захвата в последующей клети обеспечивается дополнительным введением в блок 12 формирования приращения скорости () субблока 43 вычисления скорости захвата и идентификацией его первого, второго и третьего входов соответственно с четвертым, пятым и седьмым входами блока 12 формирования приращения скорости, Тое0 соединением их соответственно с выходами источников 31 и 32 сигналов, пропорциональных значениям радиуса валков и абсолютного обжатия в после
5
0
5
дующей клети, и датчика 22 скорости движения металлао
Получение на выходе блока . 12 формирования приращения скорости сигнала dU4y, пропорционального требуемому по условиям безударного захвата приращению do скорости вращения валков последующей клети по отношению к заданной установившейся скорости щ вращения валков этой клети обеспечивается дополнительным соединением третьего и четвертого входов алгебраического сумматора 40 (фиг.2) с выходами соответственно субблока 43 вычисления скорости захвата и задатчика 9 скорости вращения валков последующей клети. Это обеспечивает требуемый принцип, при котором скорость вращения валков по окончании режима подготовки к захвату равна скорости захвата, вычисленной из условия идеального согласования скоростей вращения валков и движения заготовки в начальный момент захвата. В результате снижает вероятность поломок и продолжительность простоев на ремонт.
Повышение производительности стана достигается также за счет сокращения простоев на настройку благодаря
выполнению схемы 42 ограничения (фиго2) с дополнительной возможностью установки верхнего уровня ограничения сигнала UM на выходе интегратора 39 пропорциональным величине сигнала И на шестом входе блока 12 формирования приращения скорости, являющемся одновременно управляющим вхо- дом схемы 42 ограничения, а также благодаря дополнительному соединению шестого входа блока 12 формирования приращения скорости с выходом второго источника 35 постоянного напряжения, что позволяет автоматически переносить задание основной составляющей начального приращения скорости с выхода второго источника 35 постоянного напряжения в блок 12 формирования приращения скоростио
Все узлы системы, выполняющие функции непрерывного и логического преобразования сигналов, переключений, ограничений и вычислений по заданным алгоритмам, в частности блок -20 установки зоны нечувствительности (фиг.1) и субблок 43 вычисления скорости захвата (фиг,2), могут быть реализованы программно на базе микропроцессорного управляющего устройства (управляющей микроЭВМ).
Формула изобретения
1 о Система автоматического управления главными приводами реверсивного прокатного стана, содержащая блоки управления электроприводами валков предыдущей и последующей по ходу прр- катки клетей, соединенные входами с выходами задатчиков интенсивности соответствующих клетей, источник сигнала задания скорости вращения вал- ков предыдущей клети, выход которого соединен с входом задатчика интенсивности данной клети, сумматор, соединенный выходом с входом задатчика интенсивности последующей клети, задат- чик скорости вращения валков последующей клети, соединенный выходом с первым входом сумматора и с входом блока определения знака сигнала, выход iKOToporo соединен с первым входом логического элемента И, соединенного вторым входом с выходом датчика наличия металла в валках последующей |клети, первый ключ, управляющий вход к выход которого соединены соответст- венно с выходом логического элемента .И и с вторым входом сумматора, блок формирования приращения скорости, первые выход и вход которого соединены соответственно с информационным входом первого ключа и выходом релейного звена с регулируемой зоной нечувствительности, соединенного первым и вторым входами с выходами соответственно блока установки зоны нечувствительности и счетчика импульсов, счетный вход которого соединен с выходом второго ключа, соединенного информационным входом с выходом датчика импульсов, механически соединенного с валом электродвигателя привода валков предыдущей клети, датчик наличия металла в валках предыдущей клети, выход которого соединен с управляющим входом второго ключа и с входом установки нуля счетчика им- пульсов, датчик скорости вращения валков предыдущей клети, выход которого соединен с первым входом блока установки зоны нечувствительности, дат- . .чик скорости движения металла и задатчик технологических параметров, содержащий источники сигналов, пропорциональных значениям межклетевого
расстояния, радиуса валков предыдущей клети, опережения металла в предыдущей клети, ускорений валков предыдущей и последующей клетей, установленных эадатчиками интенсивности соответствующих клетей, начального приращения скорости вращения и заданного ускорения валков последующей клети в режиме подготовки этой клети к захвату, соединенные выходами соответственно с вторым, третьим, четвертым, пятым, шестым, седьмым и восьмым входами указанного блока установки зоны нечувствительности, и источники сигналов, пропорциональные значениям радиуса валков последующей клети и абсолютного обжатия в этой клети, при выполнении источника сигнала, пропорционального значению начального приращения скорости вращения валков последующей клети, в виде суммирующего усилителя, соединенного первым и вторым входами с выходами соответственно первого и второго источников постоянного напряжения, причем выходы источника сигнала, пропорционального значению заданного ускорения валков последующей клети в режиме подготовки ее к захвату, и первого источника постоянного напряжения соединены соответственно с вторым и третьим входами блока формирования приращения скорости, отличающаяся тем, что, с целью повышения производи-тельности стана за счет сокращения простоев на ремонт и настройку, в ней дополнительно девятый, десятый, одиннадцатый и двенадцатый входы блока установки зоны нечувствительности соединены соответственно с выходами источника сигнала задания скорости вращения валков и задатчика интенсивности предыдущей клети и счетчика импульсов и с вторым выходом блока формирования приращения скорости, а четвертый, пятый, шестой, седьмой и восьмой входы последнего соединены соответственно с выходами источников сигналов, пропорциональных значениям радиуса валков последующей клети и абсолютного обжатия в этой клети, второго источника постоянного напряжения, датчика скорости движения металла и задатчика скорости вращения валков последуюшей клетио
2, Система попЛ, отличающаяся тем, что блок формирования
приращения скорости содержит ключ, информационный вход которого является третьим входом блока, а его управляющий вход является первым входом блока и соединен одновременно с управляющим входом переключателя, пер вый информационный вход которого является вторым входом блока, а его второй информационный вход соединен с выходом источника опорного напряжения, выход переключателя соединен с входом интегратора, соединенного выходом с первым входом алгебраического сумматора, выход которого является первым выходом блока, а второй его вход соединен с выходом указанного ключа, причем интегратор выполнен в виде операционного усилителя с схемой ограничения, присоединенной выводами параллельно конденсатору в цепи обратной связи этого операционного усилителя, а схема ограничения выполнена с возможностью установки нижнего и верхнего уровней ограничения сигнала на выходе интегратора, субблок вычисления скорости захвата, первый, второй и третий входы которого являются соответственно четвер- тым пятым и седьмым входами блока,
Q а выход, являющийся одновременно вторым выходом блока, соединен также с третьим входом алгебраического сумматора, четвертый вход которого является восьмым входом блока, причем схема
5 ограничения выполнена с дополнительной возможностью установки верхнего уровня ограничения сигнала на выходе интегратора, пропорциональным по модулю сигналу на шестом входе блока,
о являющемся одновременно управляющим входом схемы ограничения
U
Фаг.
Фиг. 2
К 2 иогр
KfUt
М 2)ах8.
f, Ј lel
Шгзал6.
Фие.З
BeoffQ},,L,ffr,S,,a)j3l
Мгз.АМги.йгМз.Ча fi,ta 230X8
нет
Фиг.4
| Авторское свидетельство СССР № 1180099, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
