Фие.1
Изобретение относится к машиностроению и может быть использовано в робототехнических комплексах.
Цель изобретения - расширение технологических возможностей пневматического схвата.
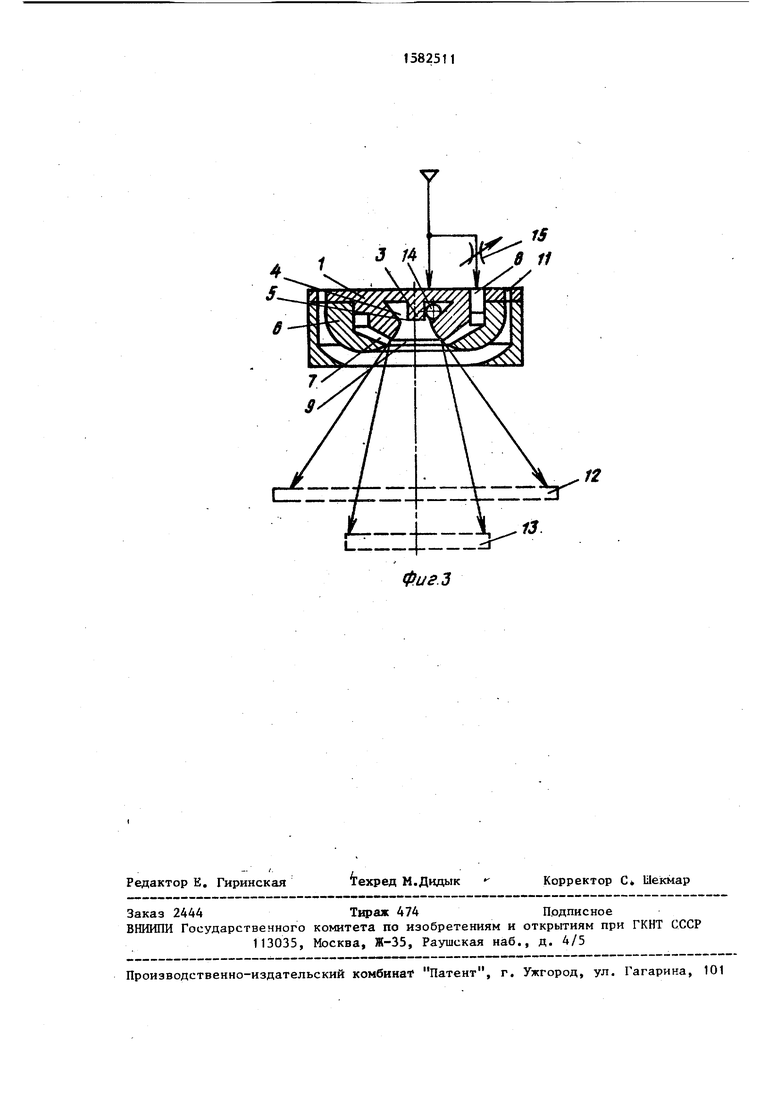
На фиг. 1 изображен предлагаемый схват, разрез; на фиг. 2 - схват с удерживаемой деталью; на фиг. 3 - вариант выполнения схвата.
Схват содержит полый корпус 1 с отверстием 2 для подвода рабочей среды. В полости 3 корпуса 1 установлен обтекатель 4, образующий совместно с внутренней поверхностью корпуса 1 кольцевое сопло 5. На корпусе 1 установлена кольцевая насадка 6, образующая совместно с внешней поверхностью корпуса 1 дополнительное кольцевое сопло 7. В насадке 6 выполнен канал 8 для подачи рабочей среды в сопло 7. На насадке 6 с зазором 9 установлена кольцевая оправа 10, имеющая отверстия 11 для выхода рабочей среды и предназначенная для удержания деталей 12 и 13.
Возможен вариант выполнения захва- та, когда рабочая среда в полость 3 подается по тангенциальному питающему каналу 14. Для регулирования расхода рабочей среды через сопло 7 может быт установлен дроссель .15.
Захват работает следующим образом.
Рабочая среда, например воздух, под давлением подается через отверсти
5
0
5
0
5
2 и канал 8 соответственно в сопла 5 и 7. Поток рабочей среды, истекающий из сопла 5, отклоняется потоком рабочей среды, истекающим из сопла 7. Направление результирующего потока показано стрелками на фиг. 1. Внутри купола истекающей рабочей среды образуется область низкого давления, за счет чего деталь 12 присасывается. Одновременно прекращается подача рабочей среды в канал 8 и сопло 7. Нйправ- ление потока рабочей среды, истекающей из сопла 5, изменяется, как это показано стрелками на фиг. 2. В случае установки дросселя 15 можно управлять направлением результирующего потока, меняя расход рабочей среды через сопло 7. После прекращения подачи рабочей среды деталь 12 открепляется. Формула изобретения
Пневматический схват, содержащий полый корпус с установленным в нем обтекателем, образующим совместно с внутренней поверхностью корпуса кольцевое сопло, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения зоны захвата детали, он снабжен средством изменения направления истечения рабочей среды из кольцевого сопла, выполненным в виде дополнительного кольцевого сопла, размещенного на корпусе соосно с основным кольцевым соплом.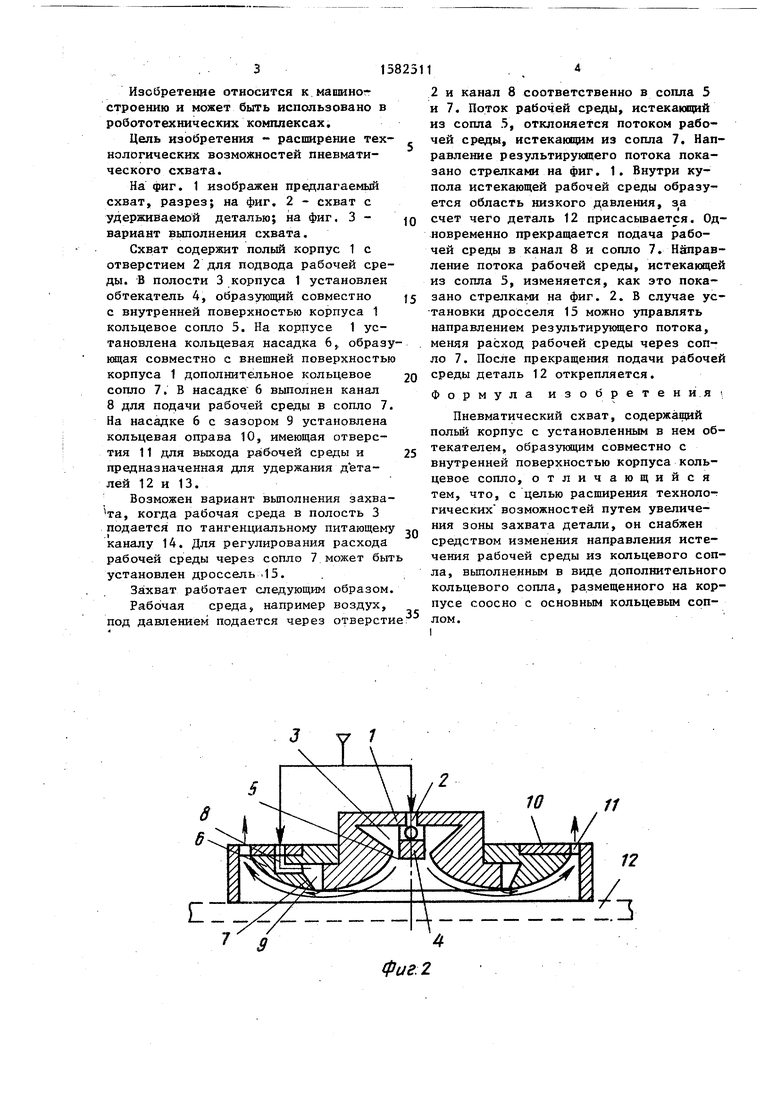
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический схват | 1984 |
|
SU1249768A1 |
| Пневматический захват | 1988 |
|
SU1552512A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| Пневматический схват | 1985 |
|
SU1766648A2 |
| АЭРОДИНАМИЧЕСКИЙ ЗАХВАТ | 2008 |
|
RU2366604C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| Манипулятор | 1989 |
|
SU1613318A1 |
| Пневматический схват | 1988 |
|
SU1620300A1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота-ма- |нипулятора. Цель изобретения - расширение технологических возможностей пневматического схвата. Схват содержит полый корпус 1, отверстие 2 для подачи рабочей среды, обтекатель 4, кольцевое сопло 5, кольцевую насадку 6, дополнительное кольцевое сопло 7, канал 8 для подачи рабочей среды, кольцевую оправу 10. При работе захвата поток рабочей среды, истекающий из сопла 5, может отклоняться потоком рабочей среды, истекающим из сопла 7. Это позволяет менять направление основного потока, что приводит к изменению глубины зоны разрешения, 3 ил. 5 IB
Фиг. 2
Редактор Е. Гиринская
Заказ 2444Тираж 474Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
п
Техред М.Дндык
Корректор С Шекмар
| Вакуумный держатель | 1979 |
|
SU776915A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
