1
(61)1680492 (21)3924969/08 (22) 09.07.85 (46)07.10.92. Бюл. №37
(71)Ростовский научно-исследовательский институт технологии машиностроения
(72)Ю.В.Гявгянен, Б.Ю.Овсянников и Л.В.Попов
(56)Авторское свидетельство СССР № 1680492, кл. В 25 J 15/06, 28.06.85. (54) ПНЕВМАТИЧЕСКИЙ СХВАТ
(57)Изобретение относится к машиностроению, в частности к пневматическим захватным головкам манипуляторов. Цель изобретения состоит в повышении функциональных возможностей за счет обеспечения захвата деталей за внутреннюю поверхность. В схвате, содержащем кольцевую камеру 3, соединенную с источником давления рабочей среды тангенциальным каналом 4, сужающееся кольцевое сопло 8 выведено на наружную боковую поверхность корпуса. Вращающийся воздушный поток, истекая из сопла 8, воздействует на деталь 11 и, удерживая ее на схвате, заставляет совершать вращательное и колебательное движения. Это позволяет удерживать деталь за внутреннюю поверхность и осуществлять автоматический поиск сопрягаемой с ней поверхности. Упорами 9 можно регулировать положение детали на схвате. 2 ил.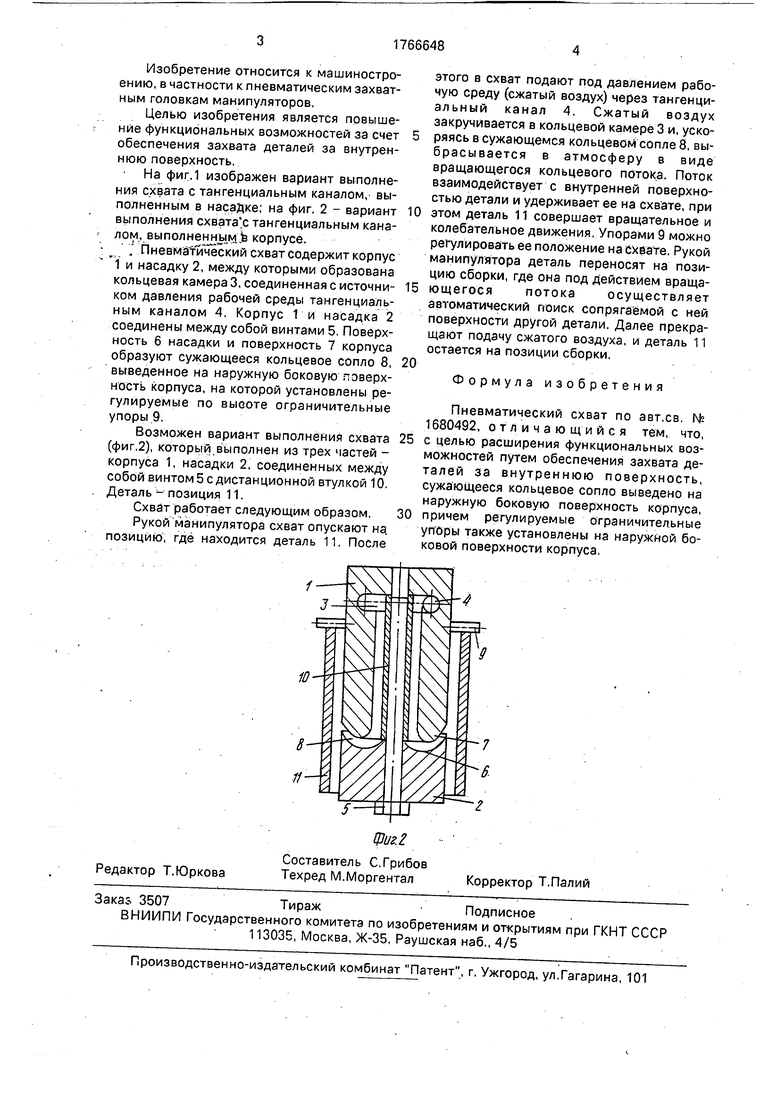
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический схват | 1988 |
|
SU1620300A1 |
| Пневматический схват | 1984 |
|
SU1249813A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| Пневматический схват | 1988 |
|
SU1582511A1 |
| Пневматический схват | 1983 |
|
SU1135639A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2002 |
|
RU2202466C1 |
| Пневматический захват | 1983 |
|
SU1098793A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2179504C1 |
| Пневматический захват | 1988 |
|
SU1552512A1 |
| Манипулятор | 1989 |
|
SU1613318A1 |

(Л
С
S
J 4
К $
N 00
го
Изобретение относится к машиностроению, в частности к пневматическим захватным головкам манипуляторов.
Целью изобретения является повышение функциональных возможностей за счет обеспечения захвата деталей за внутреннюю поверхность,
На фиг.1 изображен вариант выполнения схвата с тангенциальным каналом, выполненным в насадке; на фиг. 2 - вариант выполнения схвата с тангенциальным каналом, выполненном. корпусе.
; Пневматический схват содержит корпус 1 и насадку 2, между которыми образована кольцевая камера 3, соединенная с источни- ком давления рабочей среды тангенциальным каналом 4, Корпус 1 и насадка 2 соединены между собой винтами 5 Поверхность 6 насадки и поверхность 7 корпуса образуют сужающееся кольцевое сопло 8, выведенное на наружную боковую поверхность корпуса, на которой установлены регулируемые по высоте ограничительные упоры 9.
Возможен вариант выполнения схвата (фиг.2), который выполнен из трех частей - корпуса 1, насадки 2, соединенных между собой винтом 5 с дистанционной втулкой 10. Деталь - позиция 11.
Схват работает следующим образом.
Рукой манипулятора схват опускают на. позицию, где находится деталь 11. После
этого в схват подают под давлением рабочую среду (сжатый воздух) через тангенци- альный канал 4. Сжатый воздух закручивается в кольцевой камере 3 и, ускоряясь в сужающемся кольцевом сопле 8, вы- брасывается в атмосферу в виде вращающегося кольцевого потока. Поток взаимодействует с внутренней поверхностью детали и удерживает ее на схвате, при этом деталь 11 совершает вращательное и колебательное движения. Упорами 9 можно регулировать ее положение на схвате. Рукой манипулятора деталь переносят на позицию сборки, где она под действием вращающегося потока осуществляет автоматический поиск сопрягаемой с ней поверхности другой детали. Далее прекращают подачу сжатого воздуха, и деталь 11 остается на позиции сборки.
Формула изобретения
Пневматический схват по авт.св. № 1680492, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения захвата деталей за внутреннюю поверхность, сужающееся кольцевое сопло выведено на наружную боковую поверхность корпуса, причем регулируемые ограничительные упоры также установлены на наружной боковой поверхности корпуса.
