Изобретение относится к сельскохозяйственному машиностроению.
Целью изобретения является повышение эффективности стабилизации тягового усилия за счет автоматического регулирования угла наклона линии тяги трактора в зависимости от угла наклона результирующей линии сопротивления плуга.
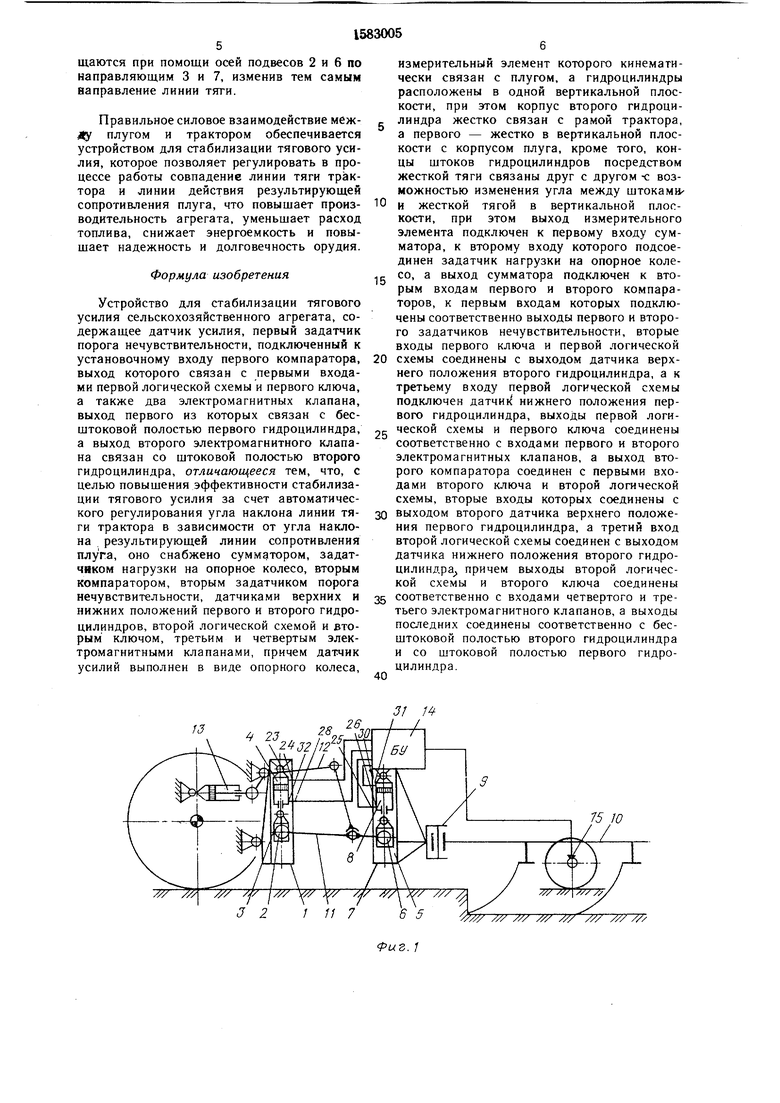
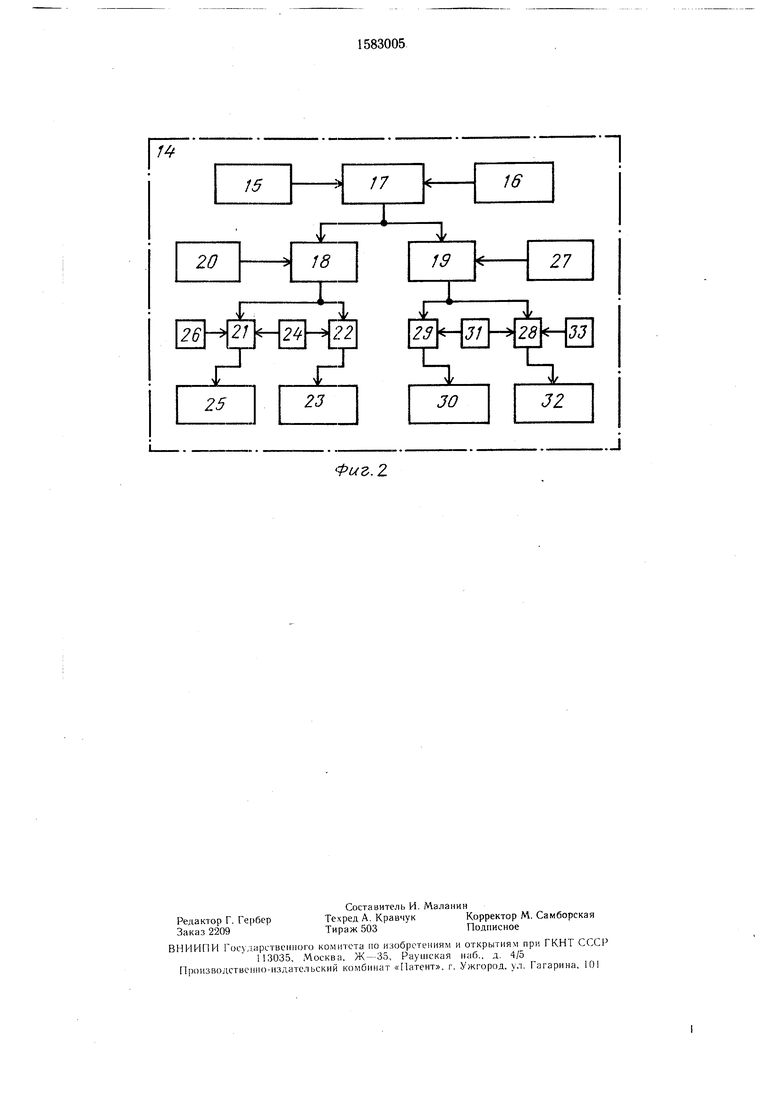
На фиг. 1 изображена кинематическая схема сельскохозяйственного агрегата; на фиг. 2 - схема устройства для стабилизации тягового усилия сельскохозяйственного агрегата.
Сельскохозяйственный агрегат содержит переднее промежуточное звено 1, закрепленное на тракторе, ось подвеса 2 передних шарниров тяг, направляющего звена 3 и гидроцилиндра 4. Заднее промежуточное звено 5, имеющее ось подвеса 6, которая может перемещаться по вертикали в направляющих 7 при помощи гидроцилиндра 8 присоединено шарниром 9 к плугу 10.
Присоединительные тяги II соединены с подъемными рычагами 12 и гидроцилиндром 13, Устройство для стабилизации т говых усилий агрегата 14 соединено с гидро- цилиндрами 4 и 8 магистралью гидросистемы и с датчиком 15 действительной нагрузки на. опорном колесе плуга. Задат- чик 16 нагрузки на опорном колесе и датчик 15 действительной нагрузки подключены к сумматору 17; который присоединен к
оси, или через логическую схему 21 пуска на электромагнитный клапан 25 опускания задней оси, если включен датчик 24 верхнего положения переднего гидроцилиндра и не включен датчик 26 нижнего положения гидроцилиндра задней оси. Если разница заданной и действительной нагрузки на опорное колесо положительная и больше заданного задатчиком 27 порога нечувствительности к уменьшению нагрузки,
первому 18 и второму 19 компаратору. За- 10 то компаратор 19 вырабатывает сигнал, датчик 20 порога нечувствительности под-поступающий через ключ 29 на электромагнитный клапан 30 подъема задней оси, если не включен датчик 31 верхнего поключен к первому компаратору 18, который подсоединен к первой логической схеме 21 и первому ключу 22, который соединен с элекложения гидроцилиндра задней оси, или четромагнитным клапаном 23 подъема перед- 15 рез логическую схему 28 пропуска.на элек- ней оси. Датчик 24 верхнего положениятромагнитный клапан 32 опускания передней оси, если включен датчик 31
гидроцилиндра передней оск одним выводом присоединен к первому ключу 22, а вторым - к первой логической схеме 21 пропуска, которая соединена с электромагнитным клапаном 25 опускания задней оси. Датчик 26 ниж- 20 него положения гидроцилиндра задней оси подсоединен к первой логической схеме 21 пропуска. Задатчик 27 порога нечувствительности подключен к второму компаратору 19, который подсоединен к второй логической схеме 28 пропуска и к второму ключу 29, который соединен с электромагнитным клапаном 30 подъема задней оси. Датчик 31 верхнего положения гидроцилиндра задней оси одним- выводом присоединен к второму
ключу 29 а вторым
оси, если включен датчик 61 верхнего положения заднего гидроцилиндра и выключен датчик 33 нижнего положения гидроцилиндра передней оси.
Передние и задние шарниры тяг могут перемещаться по вертикали в направляющих 3 и 7 с помощью гидроцилиндров 4 и 8, чем достигается изменение нагрузки на опорном колесе плуга, направлении линии тяги и величины заглубляющего момента.
Устройство для стабилизации тягового усилия агрегата 14 является звеном, следящим за определенной нагрузкой на опорном колесе плуга, что обеспечивает совмещение линии тяги и линии результируюческой схеме 28 пропуска, которая соединена с электромагнитным клапаном 32 опускания передней оси. Датчик 33 нижнего положения гидроцилиндра передней оси подсоединен к второй логической схеме 28 пропуска.
Устройство для стабилизации тягового усилия сельскохозяйственного агрегата работает следующим образом.
Передние шарниры тяг 11 соединяются с осью подвеса 2 промежуточного звена 1, а задние шарниры тяг соединяются с осью подвеса 6 промежуточного звена 5, которые управляются гидроцилиндрами 4 и 8 и направляющими звеньями 3 и 7 при помощи устройства для стабилизации тяговых усилий
второй логи- зо щеи сопротивления плуга.
При подъеме присоединительных тяг 11 с помощью подъемных рычагов 12 и гидроцилиндра 13, орудие поднимается в транспортное положение, при этом отсутствует нагрузка на опорном колесе плуга, 35 в следствие чего устройство для стабилизации тягового усилия агрегата 14 и гидроцилиндры 4 и 8 находятся в заблокированном положении, при опускании плуг включается в работу, появляется нагрузка на опорном колесе плуга, вследствие чего устройство 14 и гидроцилиндры 4 и 8 раз. блокируются. Перемещение по вертикали оси подвеса 2 промежуточного звена 1, оси подвеса 6 промежуточного звена 5 в процессе
40
работы производится при помощи сигнала,
агрегата 14, на которое подается сигнал45 поступающего от датчика 15 действительс датчика 15 действительной нагрузки ог.ор-ной нагрузки опорного колеса плуга на
ного колеса плуга.устройство 14, и гидроцилиндрами 4 и 8,
В процессе работы сигналы задатчика 16когда гидроцилиндр 4 трактора находится
нагрузки и датчика 15 действительнойв плавающем положении,
нагрузки на опорное колесо сравниваютсяИзменение физико-механических свойств
в сумматоре 17. Если розница заданной50 почвы в пределах одного поля или измеи действительной нагрузки на опорное ко-некие рельефа поля приводит к переменлесо отрицательная и по абсолютной ве-ной нагрузке на опорном колесе плуга,
личине больше порогового значения задат-несовпадению линии тяги и линии дейстчика 20 порога нечувствительности к уве-в-ия результирующей сопротивления плуга,
личению нагрузки, то компгратор 18 выра-в результате чего в устройстве 14 вознибатывает сигнал, поступающий через ключ 2255 кает сигнал рассогласования, который перена электромагнитный клапан 23 подъемадан гидроцилиндрам 4 и 8, вызывает изпередней оси, если не включен датчик 24менение их кинематической длины. При этом
верхнего положения гидроцилиндра переднейпередние и задние шарниры тяг перемеоси, или через логическую схему 21 пуска на электромагнитный клапан 25 опускания задней оси, если включен датчик 24 верхнего положения переднего гидроцилиндра и не включен датчик 26 нижнего положения гидроцилиндра задней оси. Если разница заданной и действительной нагрузки на опорное колесо положительная и больше заданного задатчиком 27 порога нечувствительности к уменьшению нагрузки,
ложения гидроцилиндра задней оси, или ченей оси, если включен датчик 31
оси, если включен датчик 61 верхнего положения заднего гидроцилиндра и выключен датчик 33 нижнего положения гидроцилиндра передней оси.
Передние и задние шарниры тяг могут перемещаться по вертикали в направляющих 3 и 7 с помощью гидроцилиндров 4 и 8, чем достигается изменение нагрузки на опорном колесе плуга, направлении линии тяги и величины заглубляющего момента.
Устройство для стабилизации тягового усилия агрегата 14 является звеном, следящим за определенной нагрузкой на опорном колесе плуга, что обеспечивает совмещение линии тяги и линии результирующеи сопротивления плуга.
При подъеме присоединительных тяг 11 с помощью подъемных рычагов 12 и гидроцилиндра 13, орудие поднимается в транспортное положение, при этом отсутствует нагрузка на опорном колесе плуга, в следствие чего устройство для стабилизации тягового усилия агрегата 14 и гидроцилиндры 4 и 8 находятся в заблокированном положении, при опускании плуг включается в работу, появляется нагрузка на опорном колесе плуга, вследствие чего устройство 14 и гидроцилиндры 4 и 8 раз. блокируются. Перемещение по вертикали оси подвеса 2 промежуточного звена 1, оси подвеса 6 промежуточного звена 5 в процессе
а первого - жестко в вертикальной плоскости с корпусом плуга, кроме того, концы штоков гидроцилиндров посредством жесткой тяги связаны друг с другом -с возможностью изменения угла между штокамищаются при помощи осей подвесов 2 и 6 поизмерительный элемент которого кинематинаправляющим 3 и 7, изменив тем самымчески связан с плугом, а гидроцилиндры
направление линии тяти.расположены в одной вертикальной плоскости, при этом корпус второго гидроциПравильное силовое взаимодействие меж- линдра жестко связан с рамой трактора, ву плугом и трактором обеспечивается устройством для стабилизации тягового усилия, которое позволяет регулировать в процессе работы совпадение линии тяги трактора и линии действия результирующей
сопротивления плуга, что повышает произ- Ю и жесткой тягой в вертикальной плог- водительность агрегата, уменьшает расходкости, при этом выход измерительного
элемента подключен к первому входу сумматора, к второму входу которого подсоединен задатчик нагрузки на опорное коле- 15 со, а выход сумматора подключен к вторым входам первого и второго компара- Устройство для стабилизации тяговоготоров, к первым входам которых подклюусилия сельскохозяйственного агрегата, со-чены соответственно выходы первого и втородержащее датчик усилия, первый задатчикго задатчиков нечувствительности, вторые
порога нечувствительности, подключенный квходы первого ключа и первой логической
установочному входу первого компаратора, 20 схемы соединены с выходом датчика верх- выход которого связан с первыми входа-него положения второго гидроцилиндра, а к ми первой логической схемы и первого ключа, третьему входу первой логической схемы а также два электромагнитных клапана,подключен датчик1 нижнего положения пер- выход первого из которых связан с бес- вого гидроцилиндра, выходы первой логи- штоковой полостью первого гидроцилиндра, с ческой схемы и первого ключа соединены а выход второго электромагнитного клапа- соответственно с входами первого и второго
электромагнитных клапанов, а выход второго компаратора соединен с первыми входами второго ключа и второй логической схемы, вторые входы которых соединены с
топлива, снижает энергоемкость и повышает надежность и долговечность орудия.
Формула изобретения
на связан со штоковой полостью второго гидроцилиндра, отличающееся тем, что, с целью повышения эффективности стабилизации тягового усилия за счет автоматичеса первого - жестко в вертикальной плоскости с корпусом плуга, кроме того, концы штоков гидроцилиндров посредством жесткой тяги связаны друг с другом -с возможностью изменения угла между штокамилиндра жестко связан с рамой трактора,
и жесткой тягой в вертикальной плог- кости, при этом выход измерительного
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации курса сельскохозяйственного агрегата | 1983 |
|
SU1160957A1 |
| Почвообрабатывающий агрегат | 1988 |
|
SU1697597A1 |
| Сельскохозяйственный агрегат | 1985 |
|
SU1396978A1 |
| Пахотный агрегат | 1989 |
|
SU1777681A1 |
| Устройство для автоматической стабилизации коэффициента буксования пахотного агрегата | 1981 |
|
SU1042637A1 |
| СПОСОБ УЛУЧШЕНИЯ ТЯГОВО-СЦЕПНЫХ ПОКАЗАТЕЛЕЙ МАШИННО-ТРАКТОРНОГО АГРЕГАТА С НАВЕСНЫМ ПОЧВООБРАБАТЫВАЮЩИМ ОРУДИЕМ | 2011 |
|
RU2485743C1 |
| Гусеничный трактор | 1987 |
|
SU1446017A2 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2011 |
|
RU2485742C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2015 |
|
RU2611837C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2003 |
|
RU2241321C1 |
Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является повышение эффективности стабилизации тягового усилия сельскохозяйственного агрегата. Предлагаемое устройство включает в себя датчик действительной нагрузки на опорном колесе и задатчик нагрузки, сумматор, два компаратора, два задатчика порога нечувствительности, две логические схемы и два ключа, датчики нижних и верхних положений двух гидроцилиндров и четыри электромагнитных клапана. В процессе работы сигнала от задатчика нагрузки и датчика действительной нагрузки на опорном колесе сравниваются и с выхода сумматора поступают на первый и второй компараторы, на другие входы которых поступают сигналы от задатчиков зоны нечувствительности. Сформированный сигнал с выхода компаратора с учетом знака разницы заданной и действительной нагрузки на опорное колесо и их абсолютной величины поступает на входы первых и вторых логических схем и ключей, на другие входы которых поступают сигналы от датчиков нижних и верхних положений первого и второго гидроцилиндров. В результате этого на выходах логических схем и ключей выдается сигнал на соответствующий электромагнитный клапан гидроцилиндров подъема или опускания передней и задней осей подвеса тяг, расположенных на раме трактора и корпусе плуга. В результате осуществляется автоматическое регулирование угла наклона линии тяги трактора в зависимости от угла наклона результирующей линии сопротивления плуга.2 ил.
кого регулирования угла наклона линии тя- 30 выходом второго датчика верхнего положеги трактора в зависимости от угла наклона результирующей линии сопротивления плуга, оно снабжено сумматором, задат- чяком нагрузки на опорное колесо, вторым компаратором, вторым задатчиком порога
нечувствительности, датчиками верхних и 35 соответственно с входами четвертого и тренижних положений первого и второго гидроцилиндров, второй логической схемой и вторым ключом, третьим и четвертым электромагнитными клапанами, причем датчик усилий выполнен в виде опорного колеса,
40
тьего электромагнитного клапанов, а выходы последних соединены соответственно с бес- штоковой полостью второго гидроцилиндра и со штоковой полостью первого гидроцилиндра
J/ /4 9Я 28 I /
89S-Ј&
////f/ /// w/ Y//// /// // ///
32 I 11 765
ния первого гидроцилиндра, а третий вход второй логической схемы соединен с выходом датчика нижнего положения второго гидроцилиндра, причем выходы второй логической схемы и второго ключа соединены
тьего электромагнитного клапанов, а выходы последних соединены соответственно с бес- штоковой полостью второго гидроцилиндра и со штоковой полостью первого гидроцилиндра
75 Ю
///// /// /// /// /// /// /// ///
Фиг 1
/4
Фиг. 2
П
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 0 |
|
SU312559A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для стабилизации курса сельскохозяйственного агрегата | 1983 |
|
SU1160957A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
