1
(21)4464379/31-08
(22)21.07.88
(46) 07.08.90. Бюл. № 29
(71)Институт прикладных проблем механики и математики АН УССР
(72)В.Е. Бербюк и Г.Ф. Ивах
(53)62-229.72(088.8)
(56)Авторское свидетельство СССР № 510362, кл. В 25 J 9/00, 1976.
(54)ЗВЕНО МЕХАНИЧЕСКОЙ РУКИ МАНИПУЛЯТОРА
(57)Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов, предназначенных для автоматизации технологических операций. Целью изобретения является повышение точности позиционирования за счет уменьшения люфтов. Звено механической руки манипулятора состоит из копира 1, шарнирно связанных четырех основных 3-6 и двух дополнительных 7 и 8 рычагов, а также привода перемещения рычагов. Дополнительный шарнир 9, соединяющий рычаги 7 и 8, размещен в прорези копира 1. Все основные шарниры и дополнительный шарнир 9 представляют собой цилиндрические шарниры с осями, ортогональными плоскости движения перемещения звена. Привод, управляющий движением звена, размещен на основном рычаге 3 или 6, причем длина рычагов 3 и 6 меньше длины рычагов 4 и 5. Последующее звено или захват прикреплено к основному шарниру соединения рычагов 4 и 5. При работе звена механинеской руки манипулятора угловые перемещения основных рычагов 3 и 6 преобразуются звеном в движение по линии, определяемой копиром 1. 1 з.п.ф-лы, 3 ил.
а В
(Л
с: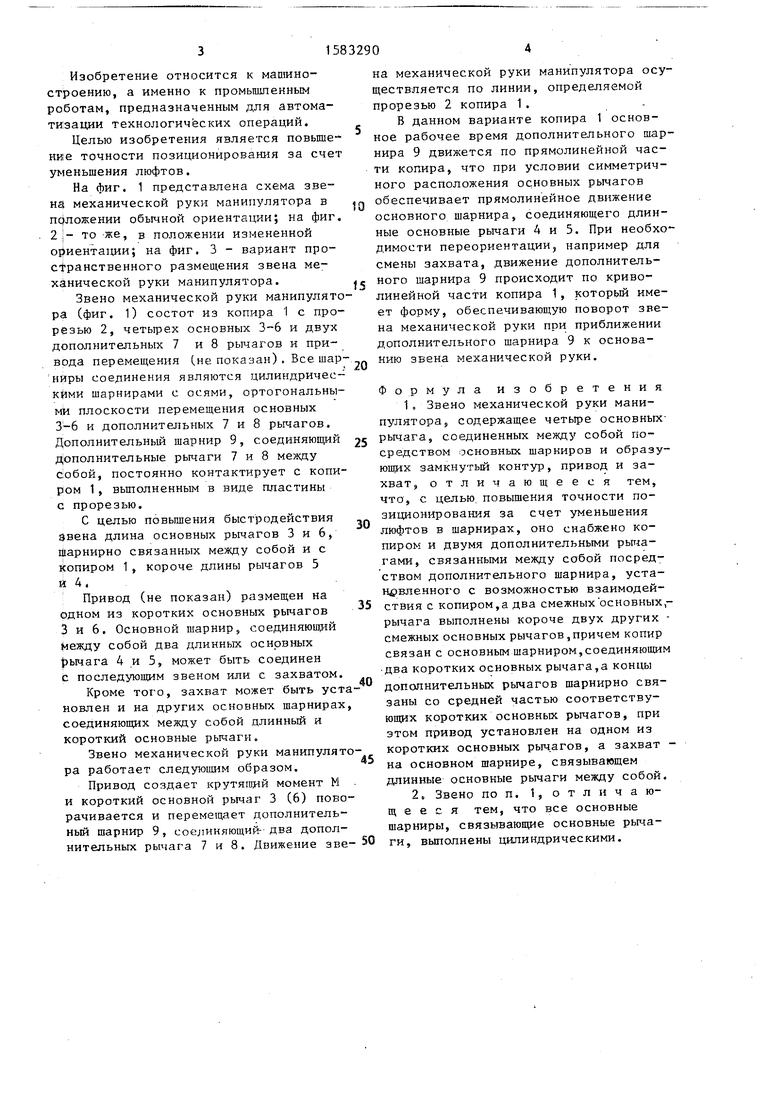
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов, предназначенных для автоматизации технологических операций. Целью изобретения является повышение точности позиционирования за счет уменьшения люфтов. Звено механической руки манипулятора состоит из копира 1, шарнирно связанных четырех основных 3-6 и двух дополнительных 7 и 8 рычагов, а также привода перемещения рычагов. Дополнительный шарнир 9, соединяющий рычаг 7 и 8, размещен в прорези копира 1. Все основные шарниры и дополнительный шарнир 9 представляют собой цилиндрические шарниры с осями, ортогональными плоскости движения перемещения звена. Привод, управляющий движением звена, размещен на основном рычаге 3 или 6, причем длина рычагов 3 и 6 меньше длины рычагов 4 и 5. Последующее звено или захват прикреплено к основному шарниру соединения рычагов 4 и 5. При работе звена механической руки манипулятора угловые перемещения основных рычагов 3 и 6 преобразуются звеном в движение по линии, определяемой копиром 1. 1 з.п.ф-лы, 3 ил.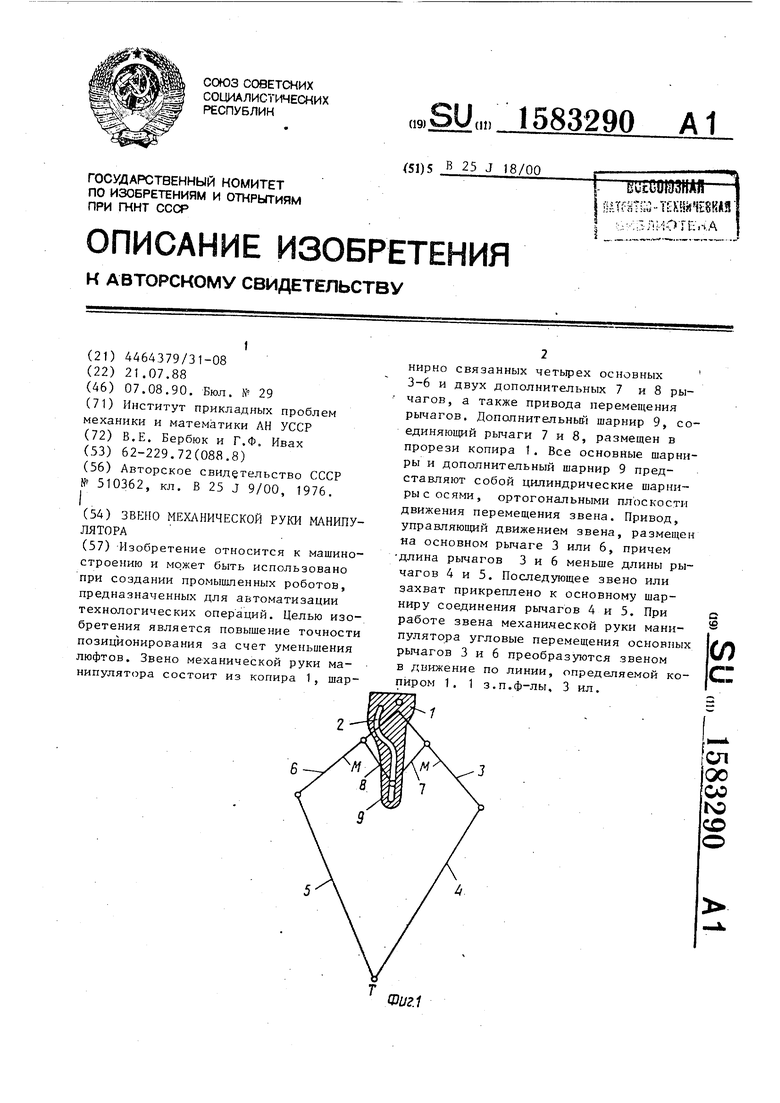
1
СЛ
оо со
N3
СО
Шиг.1
31
Изобретение относится к машиностроению, а именно к промышленным роботам, предназначенным для автоматизации технологических операций.
Целью изобретения является повышение точности позиционирования за сче уменьшения люфтов.
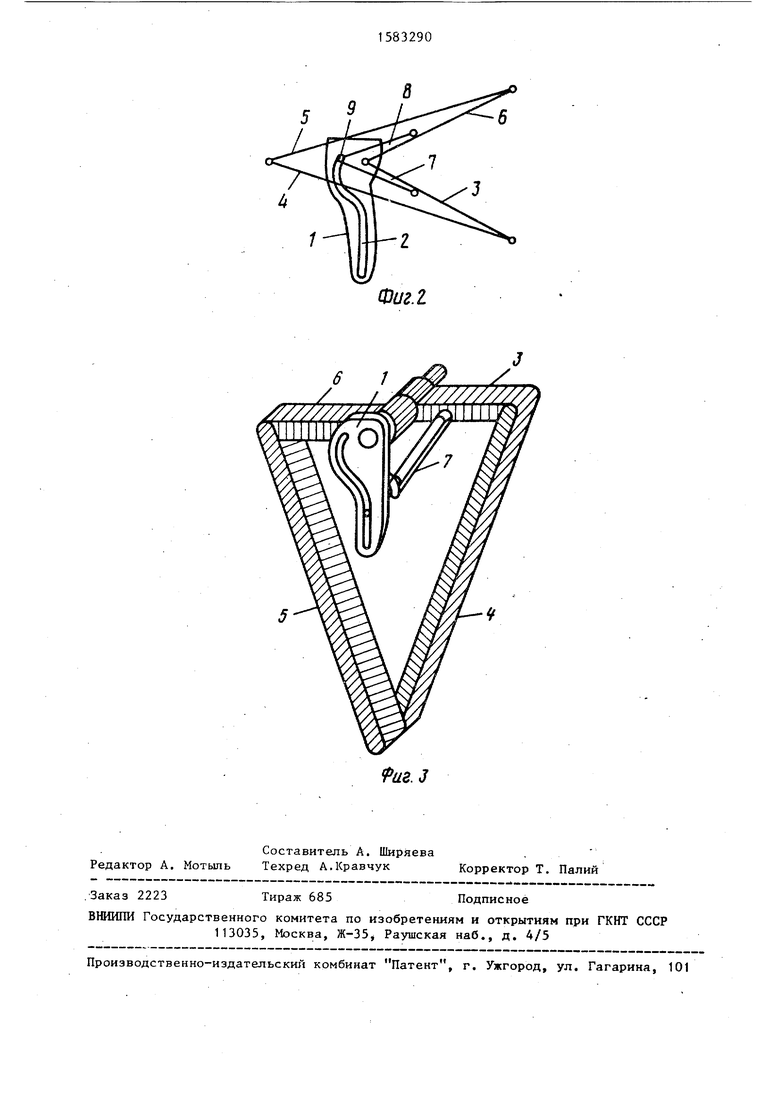
На фиг. 1 представлена схема звена механической руки манипулятора в положении обычной ориентации; на фиг 2 - то же, в положении измененной ориентации; на фиг. 3 - вариант пространственного размещения звена механической руки манипулятора.
Звено механической руки манипулятра (фиг. 1) состот из копира 1 с прорезью 2, четырех основных 3-6 и двух дополнительных 7 и 8 рычагов и привода перемещения (не показан) . Все шарниры соединения являются цилиндрическими шарнирами с осями, ортогональными плоскости перемещения основных 3-6 и дополнительных 7 и 8 рычагов. Дополнительный шарнир 9, соединяющий дополнительные рычаги 7 и 8 между собой, постоянно контактирует с копиром 1, выполненным в виде пластины с прорезью.
С целью повышения быстродействия 0вена длина основных рычагов 3 и 6, щарнирно связанных между собой и с
копиром 1, короче длины рычагов 5 и 4,
Привод (не показан) размещен на одном из коротких основных рычагов 3 и 6. Основной шарнир, соединяющий Между собой два длинных основных рычага 4 и 5, может быть соединен с последующим звеном или с захватом
Кроме того, захват может быть установлен и на других основных шарнирах, соединяющих между собой длинный и короткий основные рычаги,
Звено механической руки манипулятора работает следующим образом.
Привод создает крутящий момент М и короткий основной рычаг 3 (6) поворачивается и перемещает дополнительный шарнир 9, соединяющий- два дополнительных рычага 7 и 8. Движение зве-
0
5
0
на механической руки манипулятора осуществляется по линии, определяемой прорезью 2 копира 1.
В данном варианте копира 1 основное рабочее время дополнительного шарнира 9 движется по прямолинейной части копира, что при условии симметричного расположения основных рычагов обеспечивает прямолинейное движение основного шарнира, соединяющего длинные основные рычаги 4 и 5. При необходимости переориентации например для смены захвата, движение дополнительного шарнира 9 происходит по криволинейной части копира 1, который имеет форму, обеспечивающую поворот звена механической руки при приближении дополнительного шарнира 9 к основанию звена механической руки.
5
0
35
0
§0
Ф
ормула изобретения
два коротких основных рычага,а концы дополнительных рычагов шарнирно связаны со средней частью соответствующих коротких основных рычагов, при этом привод установлен на одном из коротких основных рычагов, а захват - на основном шарнире, связывающем длинные основные рычаги между собой,
2,Звено по п. 1, отличающееся тем, что все основные шарниры, связывающие основные рычаги, выполнены цилиндрическими.
Фиг. I
