ФигЛ
315
Изобретение относится к машиностроению, в частности к роботам и ма ипуляторам, применяемым для автоматизации различных производственных процессов, таких как загрузка и разгрузка технологического оборудования Сборка, покраска.
Целью изобретения является снижение энергозатрат и улучшение динамических характеристик за счет снижения мощности двигателя привода и обеспечения возможности работы двигателя в установившемся режиме,
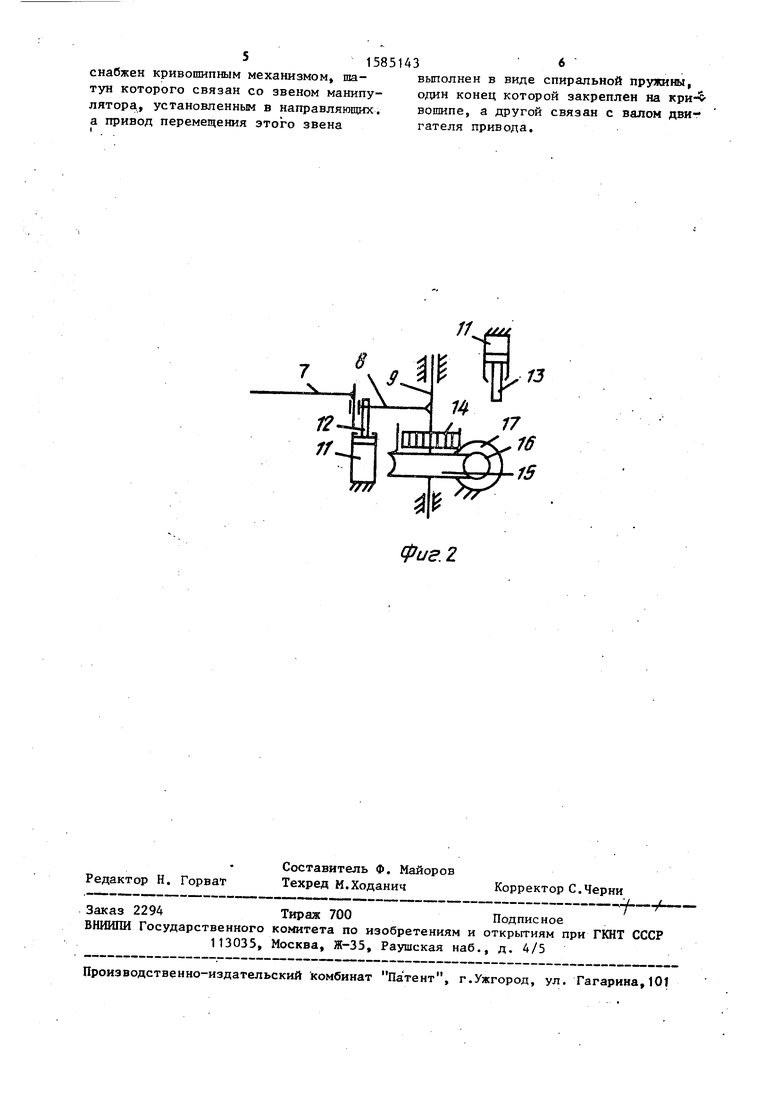
На фиг. 1 изображен модуль резонансного манипулятора в положении вшстоя; на фиг. 2 - кривошипный ме- х$низм с фиксаторами и приводом
л
Модуль резонансного манипулятора содержит основание 1 с направляющими 2 звена 3, взаимодействующего упорам 4 и 5 с,пружиной 6, закрепленной в оновании 1. Звено 3 связано с кривошипным механизмом, включающим шатун 7 и кривошип 8, закрепленный на валу 9« Управляемые при помощи пневмоци л ндров 10 и 11 фиксаторы 12 и 13 возможность фиксировать кривошип 8 в положении неустойчивого рав- но|весия, когда оси шатуна 7 я кривошипа 8 примерно совпадают. Фиксаторы 12 и 13 могут приводиться в движение электромагнитами, линейными электро- двигателями и т.п. (не показаны).
На валу 9 кривошипа 8 закреплен onkrt конец спиральной пружины 14, другой конец которой через червячное колесо 15 и червяк 16 связан с дви гафелем 17,
Звено 3 может быть связано с исполнительным механизмом робота или им(Ьть схват.
Устройство работает следующим образом.
Исходным положением устройства яв ляйтся положение выстояе когда звено 3 Занимает, например, крайнее левое положение и своим упором 4 максимально сжимает пружину 6. Оси шатуна 7 и кривошипа 8 примерно совпадают, при этом система зафиксирована в положении неустойчивого равновесия фиксатором 12. Двигатель 17 включен и заводит спиральную пружину 14, Во из- излишней заводки спиральной пр-уясины 14 может быть предусмотрена предохранительная муфта или предохранительный выключатель (не показаны
0
5
0
5
0
5
0
45
0
5
Для начала движения пневмоцилиндр
10отводит фиксатор 12 и под действием спиральной пружины 14 вал 9, а вместе с ним и кривошип 8 поворачива(ются и выводят систему из положения неустойчивого равновесия. Пружина 6 разгоняет звено 3 и ее потенциальная энергия переходит в кинетическую энергию подвижных звеньев. Когда пружина 6 полностью разожмется, ее начинает сжимать в другую сторону J упор 5 и кинетическая энергия подвижных звеньев переходит при торможении в потенциальную энергию Сжатой пружины 6. Останов происходит, когда кривошип 8 дойдет до предварительно выдвинутого пневмоцилиндром 11 фиксатора 3. Оси кривошипа 8 и шатуна 7 примерно совпадают, т.е. система снова зафиксирована в положении неустойчивого равновесия. Начинается выстой.
Мощность и скорость двигателя 17, передаточное отношение червяка 16 и колеса 15, жесткость спиральной пружины 1х и срабатывание предохранительных устройств (муфты или выключателя) рассчитываются так, чтобы за время одного цикла (высотой - движение) спиральная пружина 14 получала от двигателя 17 и отдавала в систему столько энергии, сколько ее необходимо для восполнения потерь на трение.
По окончании выстоя пневмоцилиндр
11отводит фиксатор 13 и движение происходит аналогично.
При отсутствии необходимости выстоя в одном из крайних положений достаточно убрать один из фиксаторов,
Таким образом, двигатель 17 работает в установившемся режиме.
Формула изобретения
Модуль резонансного манипулятора, содержащий расположенные на основании направляющие, установленное в направляющих и подпружиненное к основанию звено манипулятора с приводом его перемещения и по крайней мере один управляемый фиксатор, отличающийся тем, что, с целью снижения энергозатрат и улучшения динамических характеристик за счет снижения мощности двигателя привода и и обеспечения возможности работы двигателя в установившемся режиме, он
515851436
снабжен кривошипным механизмом, ша- выполнен в виде спиральной пружины, тун которого связан со звеном манипу- один конец которой закреплен на кри-с- лятора, установленным в направляющих. вошипе, а другой связан с валом дви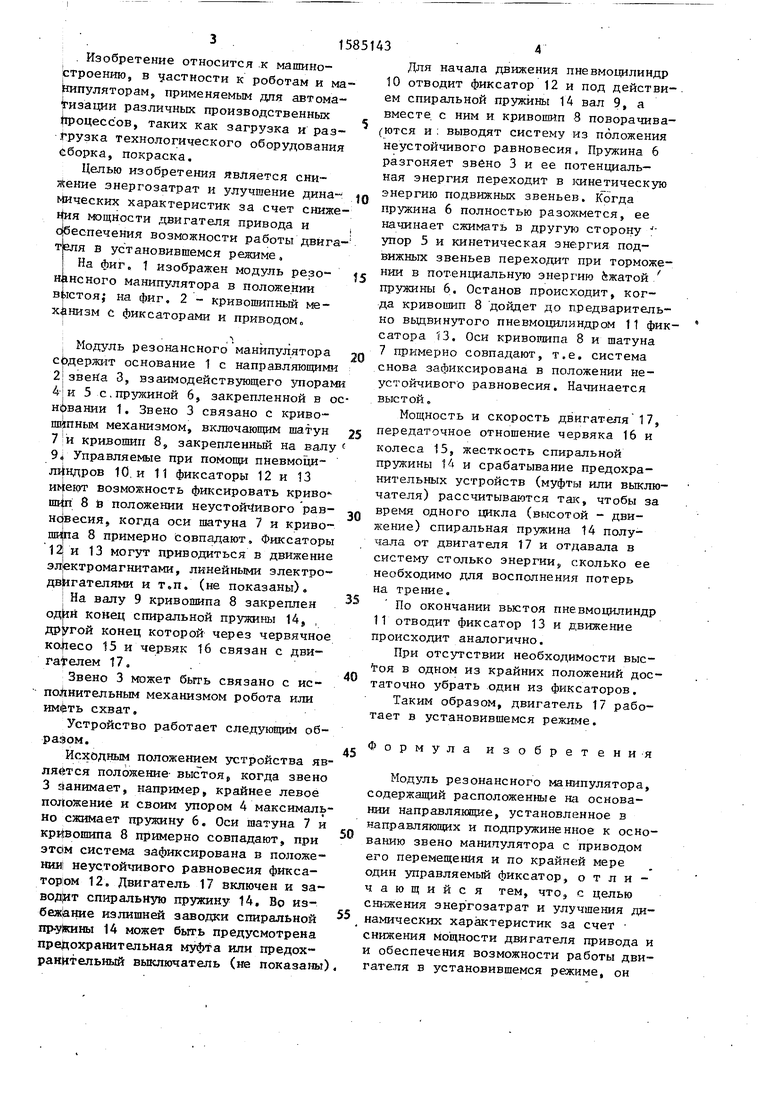
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Устройство прерывистого движения замкнутого рабочего органа конвейера | 1988 |
|
SU1583331A1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Прижимное устройство | 1988 |
|
SU1682154A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Резонансный привод | 1988 |
|
SU1544550A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
Изобретение относится к машиностроению, в частности к роботам и манипуляторам, применяемым для автоматизации различных производственных процессов, таких как загрузка и разгрузка технологического оборудования, сборка, покраска. Целью изобретения является снижение энергозатрат и улучшение динамических характеристик за счет снижения мощности двигателя привода и обеспечения возможности работы двигателя в установившемся режиме. В исходном положении звено 3 занимает положение, при котором модуль находится в положении неустойчивого равновесия и зафиксировано управляемым фиксатором 12 или 13. При этом двигатель 7 привода перемещения звена 3 включен и заводит через червячный редуктор спиральную пружину 14, конец которой закреплен на кривошипе 8 кривошипного механизма, шатун которого связан со звеном 3. Резонансный режим работы модуля обеспечивается пружиной 6, взаимодействующей поочередно с упорами 4 и 5. За время одного цикла (выстой- движение) спиральная пружина 14 получает от двигателя 17 столько энергии, сколько ее необходимо для восполнения потерь на трение. Таким образом, двигатель 17 работает в установившемся режиме. 2 ил.
а привод перемещения этого звена
гателя привода.
фиг. 2
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
