ел
оо
СО
ел
ел ел
Изобретение относится к землеройной технИке и может быть использовано в гидро- гфиводах землеройных машин.
Цель изобретения - упрощение кон- ctpyKUHH машины за счет уменьшения радиуса изгиба гибких рукавов.
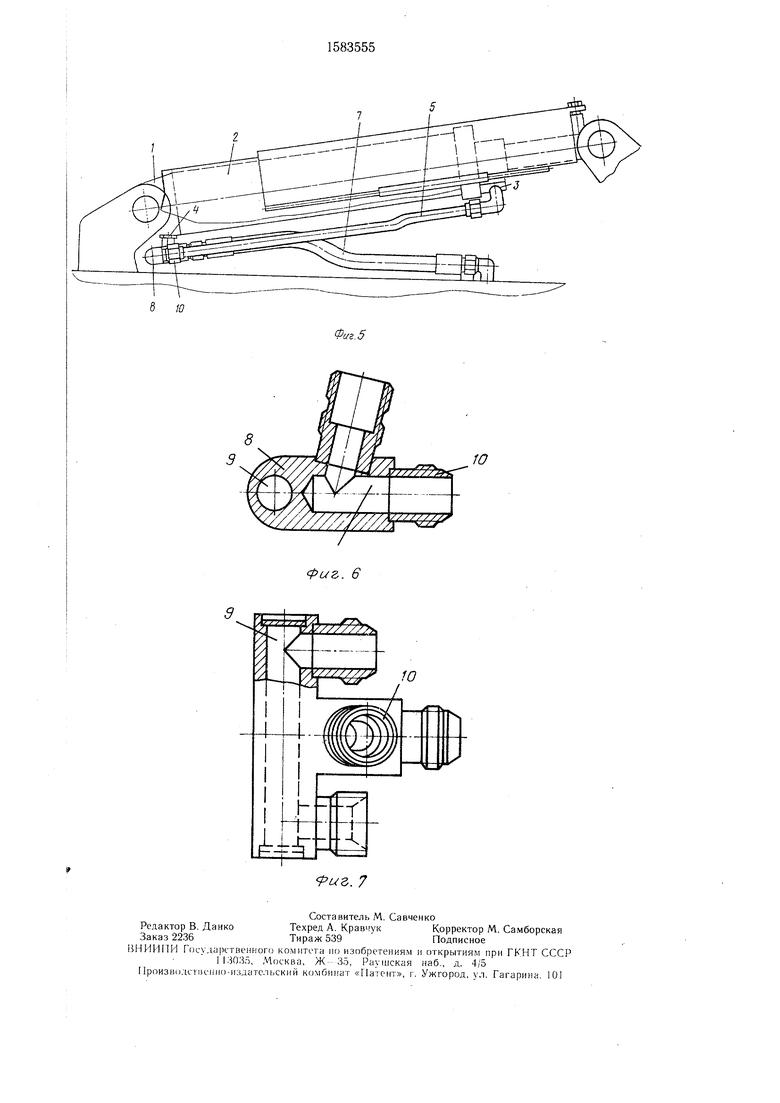
На фиг. 1 показана землеройная машина, общий вид; на фиг. 2 - гидроцилиндр рабочего оборудования; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - гидроцилиндр рабочего оборудования с выдвинутым штоком; на фиг. 6 - переходник, вид сбоку; на фиг. 7 - то же, вид сверху.
Гидропривод землеройной машины состоит из гидросистемы базовой машины и гид- рэцилиндров 1 рабочего оборудования с выполненными в их корпусах 2 подводными каналами 3 и 4, из трубопроводов 5, кЬждый из которых одним концом сообщен с подводным каналом 3, штоковой по- л|эсти гидроцилиндров 1, из гибких рукавов 6 и 7, каждый из которых одним концом подключен к гидросистеме базовой машины, и переходника 8. Каждый переходник 8 соединен с другими концами трубопроводов 5 и гибких рукавов 6 и 7 и выполнен из двух проходников 9 и 10, размещенных в одном кррпусе. Проходник 9 выполнен в виде П- ооразного канала, проходник 10 - в виде Г- образного канала, одной своей частью расположенного в одной плоскости с П-образ- нцм каналом, а другой своей частью - в плос- крсти, перпендикулярной плоскости располо- |ения П-образного канала. Один конец Г-об- рззного канала сообщен с подводным каналом 4 поршневой полости гидроцилиндра 1, а другой его конец - с гибким рукавом 6.
Работа гидропривода землеройной машину заключается в следующем.
При выдвижении штока гидроцилиндра 1 рабочая жидкость по рукаву 6 и Г-образ- ному каналу проходника 10 поступает в поршневую полость гидроцилиндра 1. Жидкость
0
5
0 5
0
5
0
из штоковой полости по трубопроводу 5 и П-образному каналу проходника 9 и рукаву 7 идет на слив.
Так как подвижные концы рукавов б и 7 подсоединены к переходнику 8, расположенному близко к оси вращения гидроцилиндра 1, то величина их перемещения при повороте гидроцилиндра 1 сравнительно небольшая, и изгиб рукавов мал, что позволяет разместить рукава в ограниченном пространстве между гидроцилиндром 1 и рабочим органом, обеспечивая их нормальную работу и конструктивную простоту их защиты от механических и иных повреждений.
Формула изобретения
Гидропривод землеройной машины, содержащий гидросистему базовой машины и гидроцилиндры рабочего оборудования с выполненными в их корпусах подводными каналами, трубопроводы, каждый из которых одним концом сообщен с подводным каналом штоковой полости одного из гидроцилиндров, гибкие рукава, каждый из которых одним концом подключен к гидросистеме базовой машины, и переходники, каждый из которых соединен с другими концами трубопроводов и гибких рукавов, отличающийся тем, что, с целью упрощения конструкции машины за счет уменьшения радиуса изгиба гибких рукавов, каждый переходник выполнен из двух проходников, соединенных между собой, причем один из проходников выполнен в виде П-образного канала, другой проходник - в виде Г-об- разного канала, одной своей частью расположенного в одной плоскости с П-образным каналом, а другой своей частью - в плоскости, перпендикулярной плоскости расположения П-образного канала, при этом один конец Г-образного канала сообщен с подводным каналом поршневой полости гидроцилиндра, а другой его конец - с одним из гибких рукавов.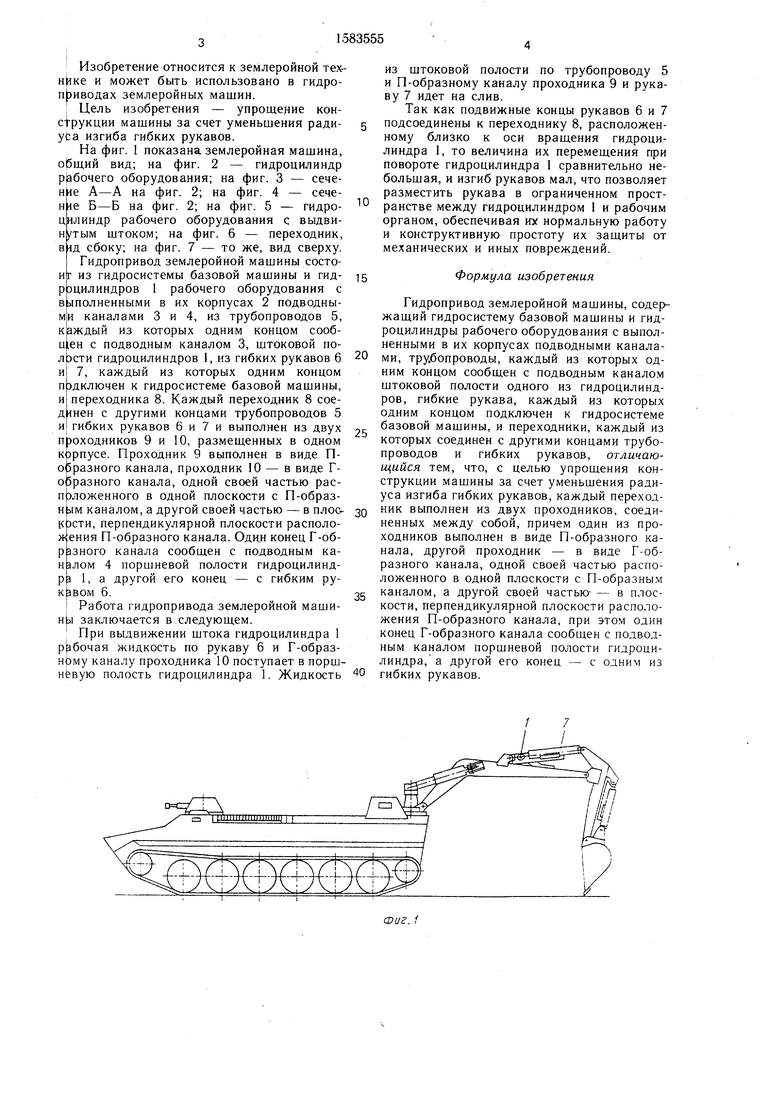
| название | год | авторы | номер документа |
|---|---|---|---|
| Рыхлитель | 1988 |
|
SU1546575A1 |
| Гидропривод каналоочистительной машины | 1989 |
|
SU1671802A1 |
| ГИДРОСИСТЕМА | 2014 |
|
RU2591373C2 |
| Шнековый траншеезасыпатель | 1985 |
|
SU1283310A1 |
| Гидропривод грузоподъемного механизма лесного манипулятора | 2022 |
|
RU2789167C1 |
| Гидропривод землеройной машины непрерывного действия | 1988 |
|
SU1564293A1 |
| Гидропривод управления рабочим органом землеройной машины | 1985 |
|
SU1258960A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1985 |
|
SU1455797A1 |
| Бульдозер | 1988 |
|
SU1553631A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1987 |
|
SU1726674A1 |

Изобретение относится к землеройной технике. Цель - упрощение конструкции машины за счет уменьшения радиуса изгиба гибких рукавов. Гидропривод состоит из гидросистемы базовой машины и гидроцилиндров (ГЦ) рабочего оборудования с выполненными в их корпусах 2 подводными каналами (К). Каждый из трубопроводов 5 гидропривода одним концом сообщен с К штоковой полости. Каждый из гибких рукавов (Р) 6 и 7 гипропривода одним концом подключен к гидросистеме базовой машины. Каждый переходник 8 гидропривода соединен с другими концами трубопроводов 5, Р 6 и Р 7. Переходник 8 выполнен из двух проходников 9 и 10. Последние размещены в одном корпусе. Проходник 9 выполнен в виде П-образного К, проходник 10 - в виде Г-образного К. Одной своей частью К проходника 10 расположен в одной плоскости с П-образным К, другой своей частью - в плоскости, перпендикулярной плоскости расположения П-образного К. Один конец К проходника 10 сообщен с К 4 поршневой полости ГЦ, другой конец - с Р 6. Прреходник 8 расположен близко к оси вращения ГЦ. При повороте ГЦ изгиб Р 6 и Р 7 небольшой. Это позволяет разместить Р 6 и Р 7 между ГЦ и рабочим оборудованием и упростить конструкцию защиты Р6 и Р7 от механических и иных повреждений. 7 ил.
гглф
5996891
Фиг. 7
Составитель М. Савченко
Техред А. КравчукКорректор М. Самборская
MKa3zz.xТираж 539Подписное
ВНИШ1И Государственного комитета по изобретениям и открытиям при ГЬ Н I CCCt
II3035, Москва, Ж 35, Ра шская наб , д. 4/5 Произио к-|1кчп1()-и.иате.1ьский комбинат «Патент, т. Ужгород, л. Гагарина 101
Редактор В. Данко Заказ 2236
| Автогрейдер | 1986 |
|
SU1323668A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экскаваторы и стреловые краны | |||
| Каталог-справочник, М.: ЦНИИЭстроймаш, 1980 с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
