1
I Изобретение относится к области гироскопического приборостроения. Известен способ приведения чувствитель иого элемента (ЧЭ) гирокомпаса в плоскость Меридиана путем наложения постоян-
.него управляющего момента вокруг оси, перпендикулярной плоскости, содержащей
; вертикашэпую ось симметрии чувствитель- ногх) элемента и ось вращения гидродвига-
;теля и последующего изменения знака упра ляющего момента.
Однако данный способ требует проведения сложных функционал1 ных преббразова-
; НИИ и вычислительных операций.
i Цель изобретения - упрощение способа
(и повышение его быстродействия.
I Эта цель достигается тем, что фиксиру-
; ют изменение знака ускорения азимутального движения чувствительного элемента и при этом проводят переключение напряжени управляющего момента.
Предлагаемый способ иллюстрируется чертежом.
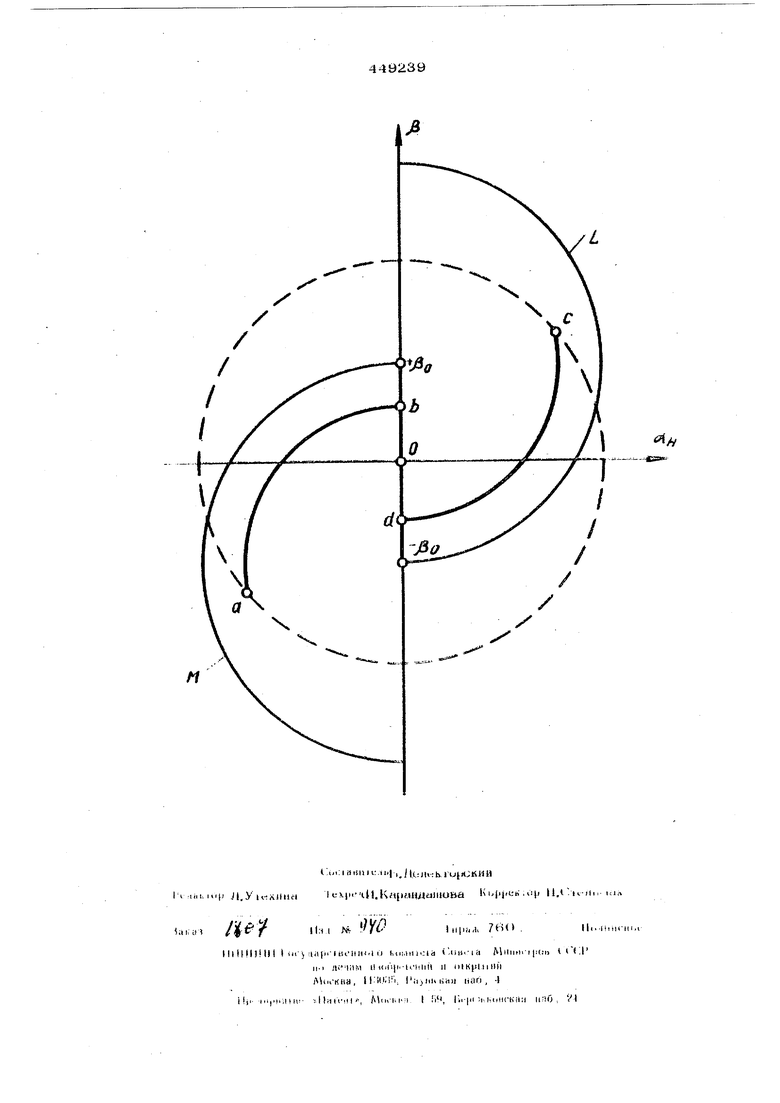
Линией переключения управляющих моментов является ось ординат в картинной
плоскости гирокомпаса, лежащая в плоскости меридиана, что обусловливает оитпмадь ное по быстродействию приведение гирокомпаса в меридиан. Закон переключения моментов, соответствующий линии, можно записать в виде
,
(Л
где и - управляющий момент;
{1 - вторая производная yi-na отклонь-ния ЧЭ от плоскости меридчаии. Поведение ЧЭ под действием постоянного по величине момента с достаточной .степенью точности описывается следующей системой дифференциальных уравнений, в которых опущены члены, oпpeдeJЮЮlииe нутационные колебания;
I 1 T -Ua frLQi
ГIHCA Q :U,(2)
где СА II ft - угль отклонения ЧЭ от / ; плоскости меридивна и
плоскости горизонта соответственно;
b и
- скорости ЧЭ отпосително плоскости меридиан и плоскости горизонта 11 - кинетический момент гироскопа; Oi - восстанавливающий момент ЧЭ; у - 1Х)ризонтальная составляющая угле вой скорости суточного вращения Земли. В зависимости от знака управляющего момента движение происходит по дугам t окружностей в нормированной картинной плоскости гирокомпаса, изображенной на чертеже, центры которых имеют коордпна ты И о ОГ картинной luiotricocTU по оси аоцисс отложена нормиривапная координат: (7l,.(AV п , по оси ординат - координата угла подъема ЧЭ на плос.косгью 1 оризоата . Пунктирной лшшей показана траектория апекса гирокомпаса при отсутствии управления. Дуги Q,b п Cd. являются траекториями эпекса riipoKuhiiiaca двух типовых случаев распо )р/г.епияначальных условий движения при действии г-юмелтов, направление которых слособствует движению ги1юкомнаса к меридиану, в cooiветствии с законом (1). 1ор(зклю4СЧ1пе моментов происходи при ii;3M(jiieHnn знака (А , т. е. при О - О, как 3T(j следует из системы уравнений (2), поэтому ли1П1ей переключения явJшeJ с;я O( ординат. Для огра1Н1ченных начальных уг.ловий дниже1П1Я иайдечся такая управляю1 и1х .loмeптoв (порядка г. см.) чти после ne|jBoix) переключеипя naciynaei i:itoju,;3HuuiH режим, Х 1рактеризуеиый гем, ччо час-го-га нереключезшй с;ч- 1емн|ся к бесконечности при стремлении амплитуды колебаний относительно линии переключения к нулю, при котором ось гирокомпаса не может покинуть плоскость меридиана. Линией переключения, на которой вьшолияется условие скользящего режима, является отрезок оси ординат от точки + В до точки . Область начальных отклонений, при которых наступает скользящий режим с одним, интервалом управления, ограничена осью ординат и полуокружност51М11 L и М . По достижении скользяшехю режима, о котором свидетельствует возникновение высокочастотных переключений управляющ41Х моментов или прекращение прецессионного движения гирокомпаса, не вь1ключаяуправ- леш1я, проводят измерение положения ЧЭ и ; от а-того положения отсчитывают азимут. Предмет изобретения Способ приведения чувствительного элемента гирокомпаса в плоскость меридиана путем наложешш посх-оянног-о управляющего момента вокру оси, перпендикулярной пло скости, содержапшй вертикальную ось симметрии чувствительного элемента и ось вращения гидродвигателя, и иоследующегхз изменения знака управляюн1е1Ю момента, о т л ич а ю щ и и с я тем, что, с целью повыше1шя ei43 быстродействия, фиксиру|от измеnejuie знака ускорения азимутали.ногх) дьижония чувстви1ч;.льно10 элемента и фи этом и{юводят переключение пап1)авления у1фавляюшею Mcif-ieHra.
ff(fy
-..

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ ГЛАВНОЙ ОСИ ГИРОКОМПАСА | 1973 |
|
SU364844A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА МАЯТНИКОВОГО ТРЕХСТЕПЕННОГО ГИРОКОМПАСА | 1970 |
|
SU288321A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| Способ измерения азимута наземным гирокомпасом | 1979 |
|
SU1622760A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1995 |
|
RU2131585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО АЗИМУТА СИСТЕМОЙ САМООРИЕНТИРУЮЩЕЙСЯ ГИРОСКОПИЧЕСКОЙ | 2009 |
|
RU2407989C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
| Способ приведения главной оси гирокомпаса в меридиан | 1990 |
|
SU1728662A1 |