Изобретение относится к прокатному производству, а именно к автоматическому управлению процессом прокатки полосы.
Цель изобретения - повышение качества поверхности и плоскостности прокатываемых полос, а также уменьшение расхода электроэнергии, затрачиваемой в процессе регулирования плоскостности.
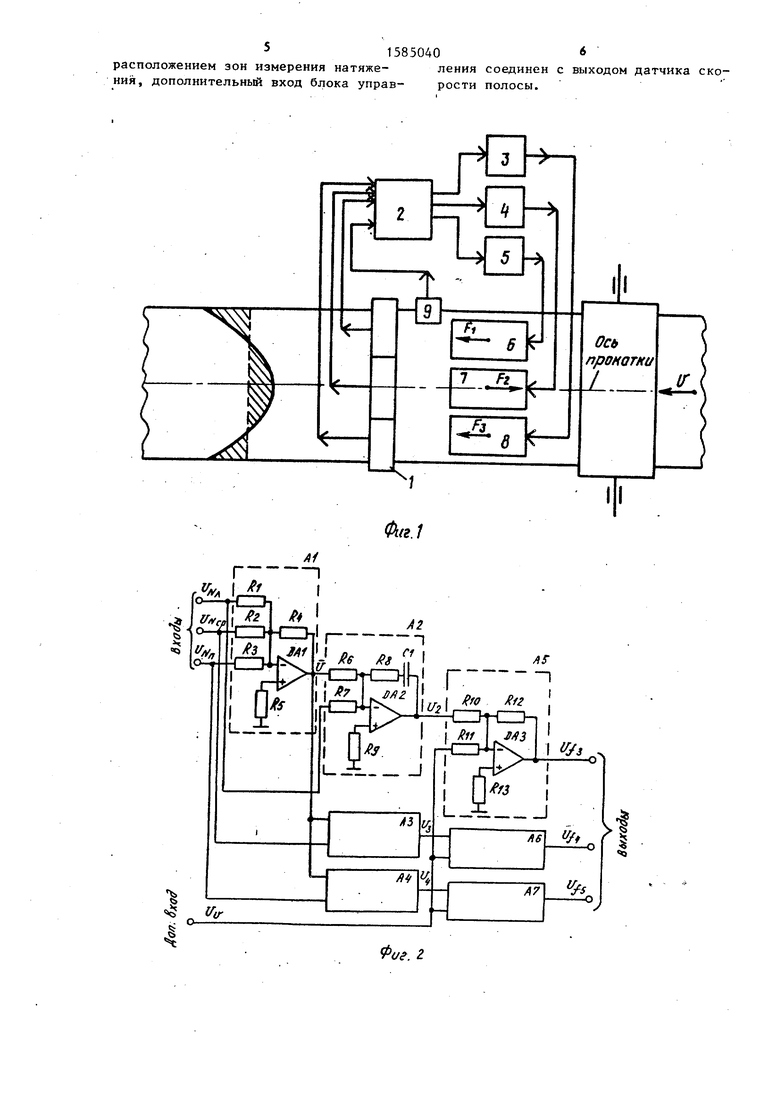
На фиг. 1 представлена структурная схема устройства автоматического управления плоскостностью полосы; на
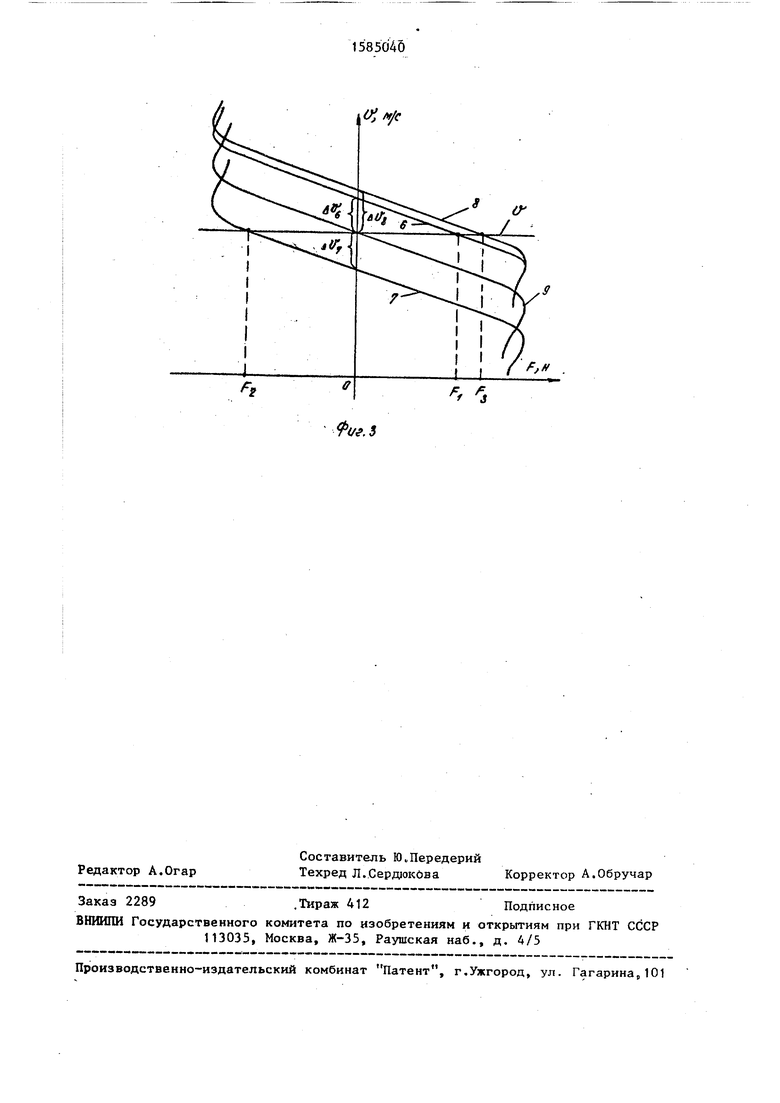
фиг. 2 - принципиальная схема блока управления; на фиг. 3 - механические характеристики линейных асинхронных электродвигателей.
Устройство автоматического управления плоскостностью полосы содержит датчик 1 распределения натяжения по ширине полосы, выходы которого по числу зон измерения натяжения соединены с входами блока 2 управления, тиристорные преобразователи 3-5 частоты с рекуперативным торможением, входы которых соединены с выходами
сл
00 СП
о U
о
блока 2 управления, а выходы - с входами линейных асинхронных электродвигателей 6-8, установленных под полосой в соответствии с расположением зон измерения натяжения, дополнительный вход блока 2 управления соединен с выходом датчика 9 скорости полосы.
Устройство работает следующим образом.
При возникновении неплоскостности полосы эпюра натяжений по ширине полосы, как правило, имеет параболическую форму ( фиг. 1). На входы блока ч 2 с выходов датчика 1 поступают сиг
него арифметического натяжения. нитное поле двигателя 7 имеет скорость vt 2f7 Т меньшую, чем скорость v полосы, поэтому двигатель 7 тормозит среднюю часть полосы с силой F, выравнивая натяжение по ширине полосы. Двигатель 7 работает в режиме рекуперативного торможения и отдает энергию в сеть. Величины усилий FI - F (фиг. 3) определяются точками пересечений механических характеристик 6-8 соответствующих двигателей с линией скорости v полосы.
При равенстве сигнала среднего натяжения U с сигналами действительных

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления телескопичностью рулона при намотке полосы | 1988 |
|
SU1551440A1 |
| Устройство управления тепловым профилем валка прокатного стана | 1983 |
|
SU1130425A2 |
| Регулятор натяжения | 1984 |
|
SU1232621A2 |
| Устройство автоматического регулирования профиля прокатываемой полосы | 1974 |
|
SU880530A1 |
| Способ регулирования размеров проката на непрерывных преимущественно проволочных и мелкосортных станах | 1981 |
|
SU1005971A1 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| Устройство для регулирования толщины полосы | 1974 |
|
SU524580A1 |
| Способ автоматического управления электроприводами петледержателей чистовой непрерывной группы клетей стана горячей прокатки | 1982 |
|
SU1041189A2 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1979 |
|
SU860254A2 |
| Система автоматического регулирования натяжения и размеров полосы | 1983 |
|
SU1097403A1 |
Изобретение относится к прокатному производству, а именно к автоматическому управлению процессом прокатки полосы. Цель изобретения повышение качества поверхности и плоскостности прокатываемых полос, а также уменьшение расхода электроэнергии, затрачиваемой в процессе регулирования плоскостности. Исполнительное устройство выполнено в виде линейных электродвигателей, а прокатываемая полоса является их вторичным элементом. Устройство регулирует распределение натяжения по ширине полосы на уровне среднеарифметического натяжения. Управление величинами сил линейных двигателей осуществлено с помощью частотного управления, для этого в блок управления поступает сигнал о скорости полосы. 3 ил.
налы U,
Л/
U
(Vcp
и
rtn , пропорциональ
ные натяжению на левой кромке полосы, в средней части и на правой кромке. Узел А1 (фиг. 2) определяет среднеарифметическое значение натяжения
UN/I + UNCP + Уровень которого показан пунктирной линией на фиг. 1 (устройство регулирует натяжение по ширине полосы на1 уровне рассчитанного среднего значения натяжения). Сопротивления резисторов R - R4 связаны соотношением R, Rz- R з R 4 / 3.
Сигнал U является заданием для регуляторов А2 - А4, на вторые входы которых поступают сигналы Uj,)/, U д/Ср, иМп. Так как U N/l и U Nn U, a uNcp 7 U, то сигналы U и U 4 на выходе A2 и АД положительные, а сигнал U3 на выходе A3 отрицательный.
Выходные сигналы регуляторов А2- А4 алгебраически суммируются с положительным сигналом U, пропорциональным скорости v полосы. Выходные сигналы сумматоров А5-А7 UЈ3 U v+ Ut, Uf«j Uv-U3 и Vff Uv + U4 поступают с выходов блока 2 на входы ти- ристорных преобразователей 3-5 частоты (фиг. 1). Благодаря этому к линейным асинхронным электродвигателям 6-8 подводятся соответственно напряжения частотой fЈ Kn-UЈ5, 7 Kn-Uf4 Hfg Kn-UЈs, (К „- коэффициент передачи преобразователя по каналу частоты). Магнитные поля двигателей 6 и 8 движутся со скоростями vt 2ft U , v g 2f )$ , где С - полюсное деление электродвигателя, большими, чем скорость v полосы (так как Ufj и Ujs больше Uv) . При это двигатели 6 и 8 создают двигательные усилия F ,, FJ, увеличивающие натяжения на кромках полосы до уровня сред
0
5
0
5
5
0
5
0
натяжений U
WA
IJ
Ncp
U
Nn
механические характеристики двигателей проходят через точку пересечения линии v с осью ординат (характеристика 9) .
Использование предлагаемого технического решения позволяет по срав нению с известным повысить эффективность управления. При этом благодаря отсутствию механического контакта между исполнительным устройством и полосой исключается влияние на поверхность полосы, т.е. исключаются царапины, разрывы и др., что обеспечивает высокое качество поверхности полосы.
Экономия электроэнергии достигается за счет принятого в устройстве регулирования натяжений по ширине полосы на уровне среднеарифметического значения, а также за счет использования рекуперации энергии.
Формула изобретения
Устройство автоматического управления плоскостностью полосы, содержащее датчик распределения натяжения по ширине полосы, выходы которого по числу зон измерения натяжения соединены с входами блока управления, отличающееся тем, что, с целью повышения качества поверхности и плоскостности прокатываемых полос, а также уменьшения расхода электроэнергии, затрачиваемой в процессе регулирования плоскостности, устройство дополнительно содержит тиристор- ные преобразователи частоты с рекуперативным торможением, входы которых соединены с выходами блока управления, а выходы - с входами линейных асинхронных электродвигателей, установленных под полосой в соответствии с
515850406
расположением зон измерения натяже- ления соединен с выходом датчика ско- ния, дополнительный вход блока управ- рости полосы.
Фиг. г
Цм/с
V
Ь Ъ
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
