Изобретение относится к машино- .строению, в частности к оборудованию для намотки рулонного металлического материала.
Цель изобретения - повышение качества намотки и надежности работы путем бесконтактного воздействия на полосу, кроме того, экономия электроэнергии и повышение устойчивости полосы.
На фиг.1 приведена блок-схема
устройства; на фиг.
расположение
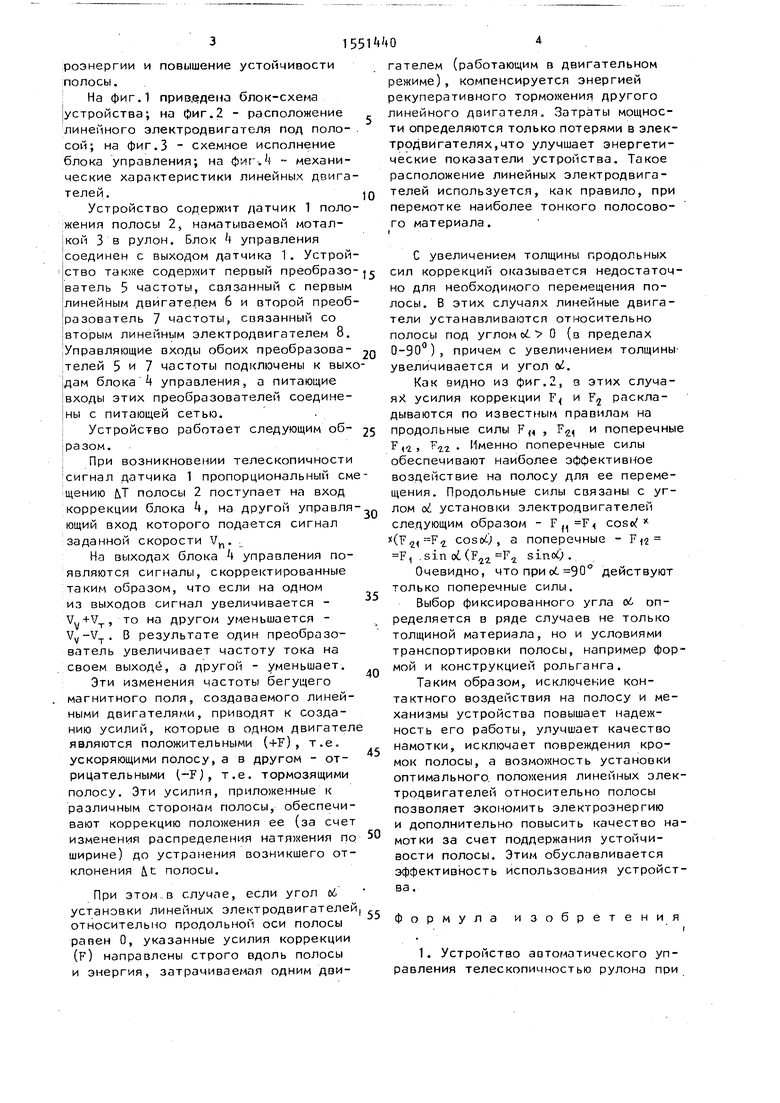
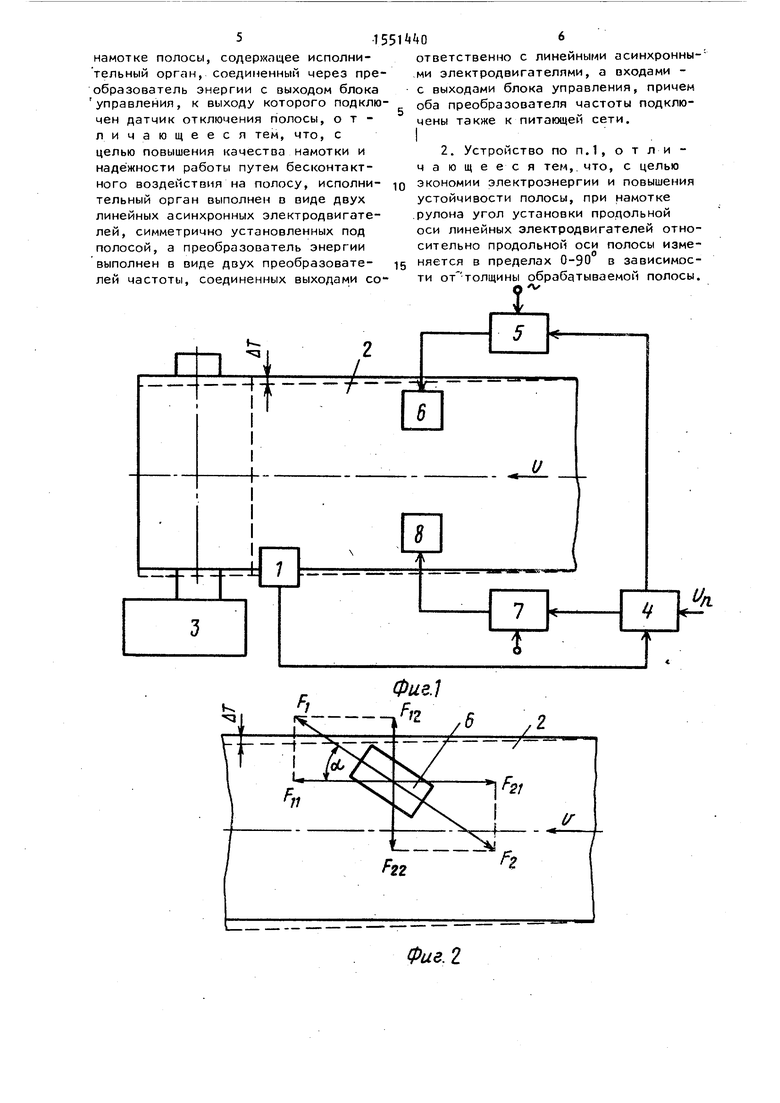
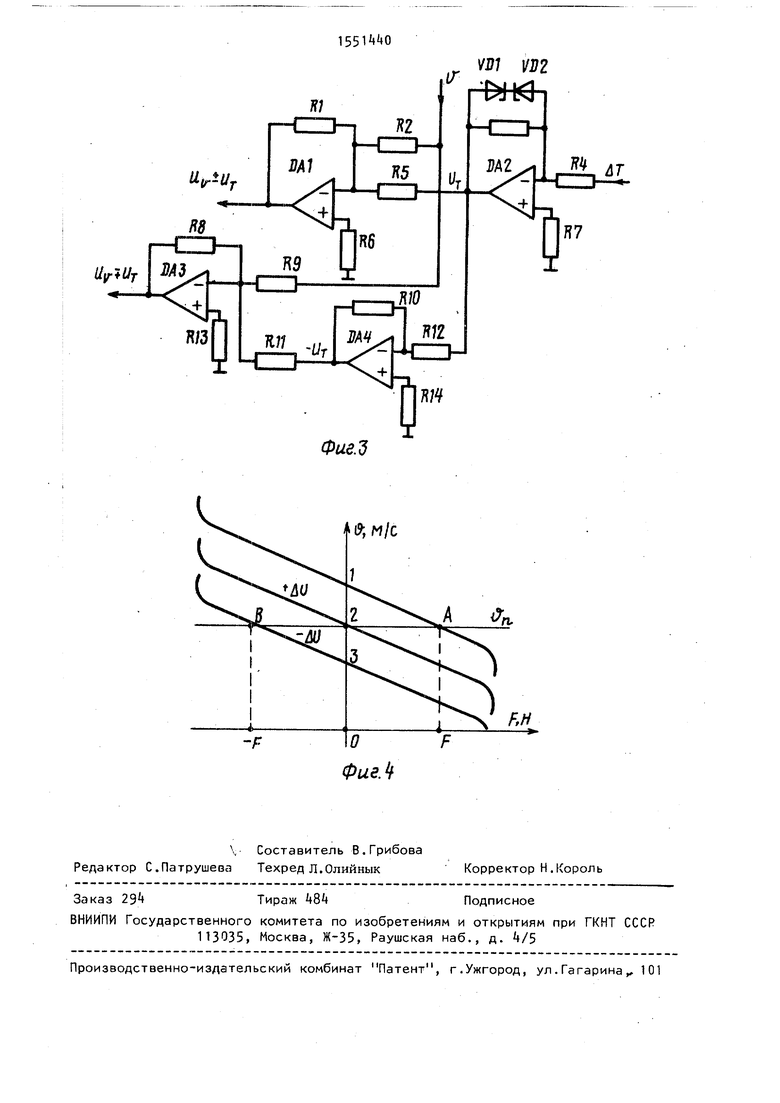
линейного электродвигателя под полосой; на фиг.З - схемное исполнение блока управления; на ФИЕ . 4 - механические характеристики линейных двигателей.
Устройство содержит датчик 1 положения полосы 2, наматываемой моталкой 3 в рулон. Блок k управления соединен с выходом датчика I. Устройство также содержит первый преобразо- сил коррекций оказывается недостаточватель 5 частоты, связанный с первым линейным двигателем 6 и второй преобразователь 7 частоты, связанный со вторым линейным электродвигателем 8.
но для необходимого перемещения полосы. В этих случаях линейные двигатели устанавливаются относительно полосы под угломui 0 {в пределах
Управляющие входы обоих преобразова- 2о 0-90°), причем с увеличением толщины
телей 5 и 7 частоты подключены к выходам блока 4 управления, а питающие входы этих преобразователей соединены с питающей сетью.
Устройство работает следующим об- 25 разом.
При возникновении телескопичности сигнал датчика 1 пропорциональный смещению &Т полосы 2 поступает на вход
увеличивается и угол si.
Как видно из фиг.2, в этих случаях усилия коррекции F и F2 раскладываются по известным правилам на продольные силы F(, , F2 и поперечные гг Именно поперечные силы обеспечивают наиболее эффективное воздействие на полосу для ее перемещения. Продольные силы связаны с угкоррекции блока 4, на другой управля-,0 лом oi установки электродвигателей
35
VVT
vv-VT .
40
ющий вход которого подается сигнал заданной скорости V.
На выходах блока управления появляются сигналы, скорректированные таким образом, что если на одном из выходов сигнал увеличивается - то на другом уменьшается - В результате один преобразователь увеличивает частоту тока на своем выходе, а другой - уменьшает.
Эти изменения частоты бегущего магнитного поля, создаваемого линейными двигателями, приводят к созданию усилий, которые в одном двигателе являются положительными (+F), т.е. ускоряющими полосу, а в другом - отрицательными (-FJ, т.е. тормозящими полосу. Эти усилия, приложенные к различным сторонам полосы, обеспечивают коррекцию положения ее (за счет изменения распределения натяжения по ширине) до устранения возникшего отклонения &t полосы.
При этом в случае, если угол об установки линейных электродвигателей г относительно продольной оси полосы равен 0, указанные усилия коррекции (р) направлены строго вдоль полосы и энергия, затрачиваемая одним дви45
50
следующим образом - cosoL) , а поперечные - F F, sin oi (F72 Fa sincO.
Очевидно, что приoi 90° действу только поперечные силы.
Выбор фиксированного угла об о ределяется в ряде случаев не толь толщиной материала, но и условиям транспортировки полосы, например мой и конструкцией рольганга.
Таким образом, исключение контактного воздействия на полосу и ханизмы устройства повышает надеж ность его работы, улучшает качест намотки, исключает повреждения кр мок полосы, а возможность установ оптимального положения линейных э тродвигателей относительно полосы позволяет экономить электроэнерги и дополнительно повысить качество мотки за счет поддержания устойчи вости полосы. Этим обуславливаетс эффективность использования устро ва.
формула изобретен
1. Устройство автоматического равления телескопичностью рулона п
Q
гателем (работающим в двигательном режиме), компенсируется энергией рекуперативного торможения другого линейного двигателя. Затраты мощности определяются только потерями в электродвигателях, что улучшает энергетические показатели устройства. Такое расположение линейных электродвигателей используется, как правило, при перемотке наиболее тонкого полосового материала.
С увеличением толщины продольных
но для необходимого перемещения полосы. В этих случаях линейные двигатели устанавливаются относительно полосы под угломui 0 {в пределах
0-90°), причем с увеличением толщины
увеличивается и угол si.
Как видно из фиг.2, в этих случаях усилия коррекции F и F2 раскладываются по известным правилам на продольные силы F(, , F2 и поперечны гг Именно поперечные силы обеспечивают наиболее эффективное воздействие на полосу для ее перемещения. Продольные силы связаны с углом oi установки электродвигателей
лом oi установки электродвигателей
следующим образом - cosoL) , а поперечные - F F, sin oi (F72 Fa sincO.
Очевидно, что приoi 90° действуют только поперечные силы.
Выбор фиксированного угла об определяется в ряде случаев не только толщиной материала, но и условиями транспортировки полосы, например формой и конструкцией рольганга.
Таким образом, исключение контактного воздействия на полосу и механизмы устройства повышает надежность его работы, улучшает качество намотки, исключает повреждения кромок полосы, а возможность установки оптимального положения линейных электродвигателей относительно полосы позволяет экономить электроэнергию и дополнительно повысить качество намотки за счет поддержания устойчивости полосы. Этим обуславливается эффективность использования устройства.
формула изобретения
i
1. Устройство автоматического управления телескопичностью рулона при
намотке полосы, содержащее исполни- тельный орган, соединенный через преобразователь энергии с выходом блока
ответственно с линейными асинхронными электродвигателями, а входами - с выходами блока управления, причем
управления, к выходу которого подклю- оба преобразователя частоты подклюответственно с линейными асинхронными электродвигателями, а входами - с выходами блока управления, причем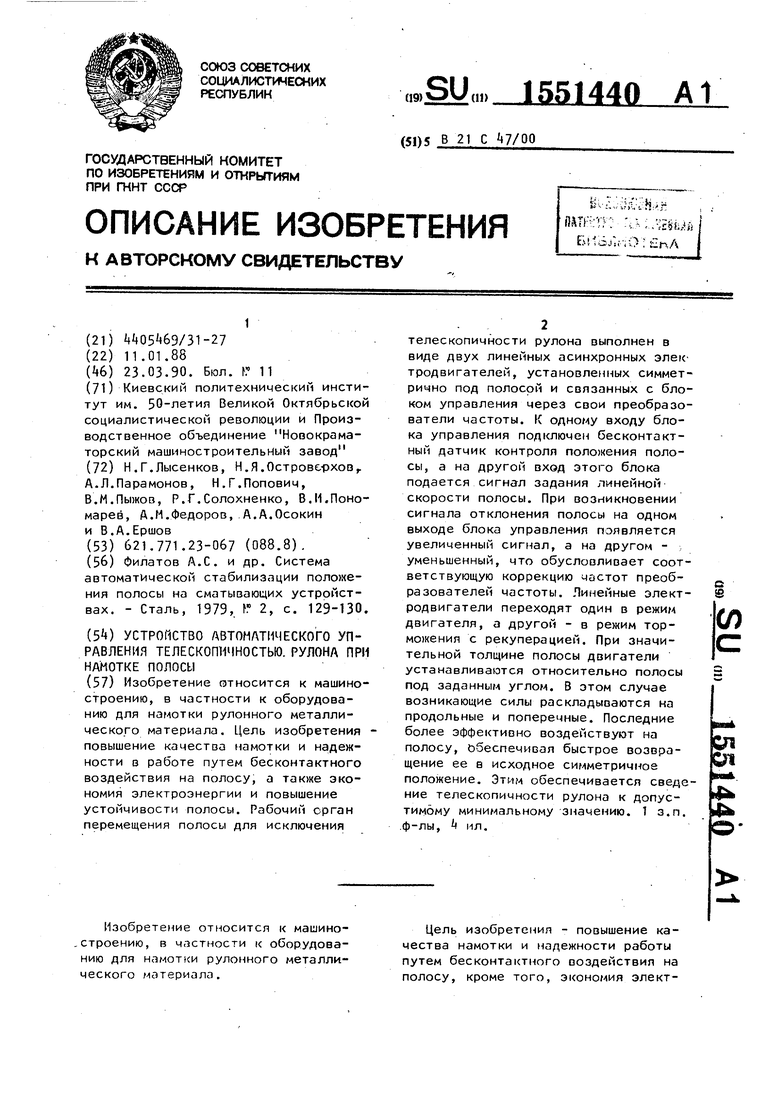
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления плоскостностью полосы | 1988 |
|
SU1585040A1 |
| Диагонально-резательная машина | 1986 |
|
SU1368185A1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1288887A1 |
| Устройство для коррекции уставки натяжения на моталке стана холодной прокатки | 1982 |
|
SU1050771A1 |
| Устройство для управления установкой направляющих линеек | 1980 |
|
SU876226A1 |
| СОСТАВ ДЛЯ НАНЕСЕНИЯ ФТОРПОЛИМЕРНОГО ПОКРЫТИЯ НА ПОЛИИМИДНУЮ ПЛЕНКУ И УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ СОСТАВА НА ПОЛИИМИДНУЮ ПЛЕНКУ | 2011 |
|
RU2503691C2 |
| Устройство для регулирования натяжения нити на мотальном автомате | 1981 |
|
SU1027127A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВАНИЯ РУЛОНОВ ПОЛОСЫ НА РАЗМАТЫВАТЕЛЕ | 2004 |
|
RU2268804C1 |
| Система управления параметрами движения полосового и пленочного материала | 1986 |
|
SU1471237A1 |
Изобретение относится к машиностроению, в частности к оборудованию для намотки рулонного металлического материала. Цель изобретения - повышение качества намотки и надежности в работе, путем бесконтактого воздействия на полосу, а также экономия электроэнергии и повышение устойчивости полосы. Рабочий орган перемещения полосы для исключения телескопичности рулона выполнен в виде двух линейных асинхронных электродвигателей, установленных симметрично под полосой и связанных с блоком управления через свои преобразователи частоты. К одному входу блока управления подключен бесконтактный датчик контроля положения полосы, а на другой вход этого блока подается сигнал задания линейной скорости полосы. При возникновении сигнала отклонения полосы на одном выходе блока управления появляется увеличенный сигнал, а на другом - уменьшенный, что обусловливает соответствующую коррекцию частот преобразователей частоты. Линейные электродвигатели переходят один в режим двигателя, а другой - в режим торможения с рекуперацией. При значительной толщине полосы двигатели устанавливаются относительно полосы под заданным углом. В этом случае возникающие силы раскладываются на продольные и поперечные. Последние более эффективно воздействуют на полосу, обеспечивая быстрое возвращение ее в исходное симметричное положение. Этим обеспечивается сведение телескопичности рулона к допустимому минимальному значению. 1 з.п. ф-лы, 4 ил.
чен датчик отключения полосы, отличающееся тем, что, с целью повышения качества намотки и надёжности работы путем бесконтактного воздействия на полосу, исполни- тельный орган выполнен в виде двух линейных асинхронных электродвигателей, симметрично установленных под полосой, а преобразователь энергии выполнен в виде двух преобразовате- лей частоты, соединенных выходами сочены также к питающей сети.
I
Г
% ъ
Фиг. 2
Фие.д
VS1 ДО
feH3
(9; м/с
A ffn.
| Филатов А.С | |||
| и др | |||
| Система автоматической стабилизации положения полосы на сматывающих устройствах | |||
| - Сталь, 1979, Р 2, с | |||
| Способ применения резонанс конденсатора, подключенного известным уже образом параллельно к обмотке трансформатора, дающего напряжение на анод генераторных ламп | 1922 |
|
SU129A1 |
| ( УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕЛЕСКОПИИНОСТЫО | |||
| РУЛОНА ПРИ НАМОТКЕ ПОЛОСЫ | |||
