Нзобретение относится к системам автоматического управления и регулирования, может быть использовано; в приводах следящих компонентов и является усовершенствованием устройства по авт. св. № 1314303.
Целью изобретения является повыше- ние быстродействия и точности устройства.
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - графики переходных процессов.
Устройство (фиг. 1) содержит нелинейный элемент 1 с зоной нечувствительности 1, первьй сумматор 2, поляризованное реле 3, первьпЧ дифференциатор 4, суммирующий усилитель 5, второй дифференциатор 6, интегратор 7, первый - третий блоки задержки 8 - 10, второй сумматор 11.
Устройство работает следующим образом.
Входной сигнал, представляющий собой рассогласование регулируемой
00 (У1
«
00
NJ
личины, поступает одновременно на входы первого и второго дифференциаторов 4,6, первого блока задерлжи 8 и интегратора 7, На выходе суммирую- щего усилителя 5 формируется сигнал согласно соотношению (1):
(t)k,x(t)+k2x(t), , (1)
где k,kj - коэффициенты пропорцио-
нальности;
x(t),x(t) - входная вел1гчина рассо- гласования регулируемой
величины и ее проиэвод- ная,
повышанлций быстродействие срабатывания реле 3, сигнал с которого подается на йторой вход первого сумматора 2 На первый вход первого сумматора 2 поступает входная величина x(t) с первого блока 8 задержки, задержанная на время, необходимое для формир.ова- корректирующего сигнала. Выходной сигнал первого сумматора 2 подается на нелинейный элемент 1 с зоной не- чувствительности и компенсирует его зону нечувствительности. Скомпенсированный сигнал зоны нечувствительности поступает на третий вход второго сумматора 11, Одновременно входная вели- чина рассогласования x(t) дифференцируется и интегрируется во втором дифференциаторе 6 и интеграторе 7, а затем через второй и третий блоки задержки 9 и 10 соответственно подается на первый и второй входы второго сумматора 11, Величина времени задержки при этом определяется временем, необходимым для дифференцирования и интегрирования сигнала x(t) и их последо- вательным сзлммированием в сумматоре 11,
Таким образом, на выходе второго сумматора 11 формируется сигнал управления согласно закону (2):
U(t)/,x(t)-«-rfjx(t)(3 , (2)
to
где 0,, ofj, коэффициенты пропорциональности; x(t) - входная величина рас-
согласования;
tj,tj - соответственно заданные начальная и конечная дли гельности переходного процесса,
Этот новый сформированный сигнал управления подается на привод следящих комплексов.
Q
15
20 25 зд эе до
45
50
55
Введение дифференциатора 6, интегратора 7, Первого/ 8, второго 9, третьего 10 блоков задержки и второго сумматора 11 позволяют реализовать формирование управляющего воздействия в соответствии с законом (2), Это приводит к снижению влияния помех, по частоте соизмеримых с частотой формируемого управляющего сигнала, а также вьщелить составляющую этого сигнала по частоте, соизмеримой с. частотой поворота исполнительного органа летательного аппарата.
Следовательно, отставание процесса изменения регулирующего воздействия от процесса изменения величины рассогласования K(t) текущего и расчетного положения исполнительного органа будет уменьшено, а значит, точность и быстродействие регулятора- увеличатся.
Современная элементная база позволяет осуществить выбор элементов для практической реализации дифференциатора 6, интегратора 7, блоков задержки 8 - 10, сумматора 11. Например, дифференциатор, интегратор и сумматор могут быть выполнены на базе операционного усилителя и КС-элементов, а блоки задержки на пассивных элементах (RC-цепочках),
Таким образом, предлагаемое устройство обеспечивает повьшенное качество управляющих воздействий, связанное с увеличением быстродействия в динамических режимах и повьшением точности в установившихся процессах,
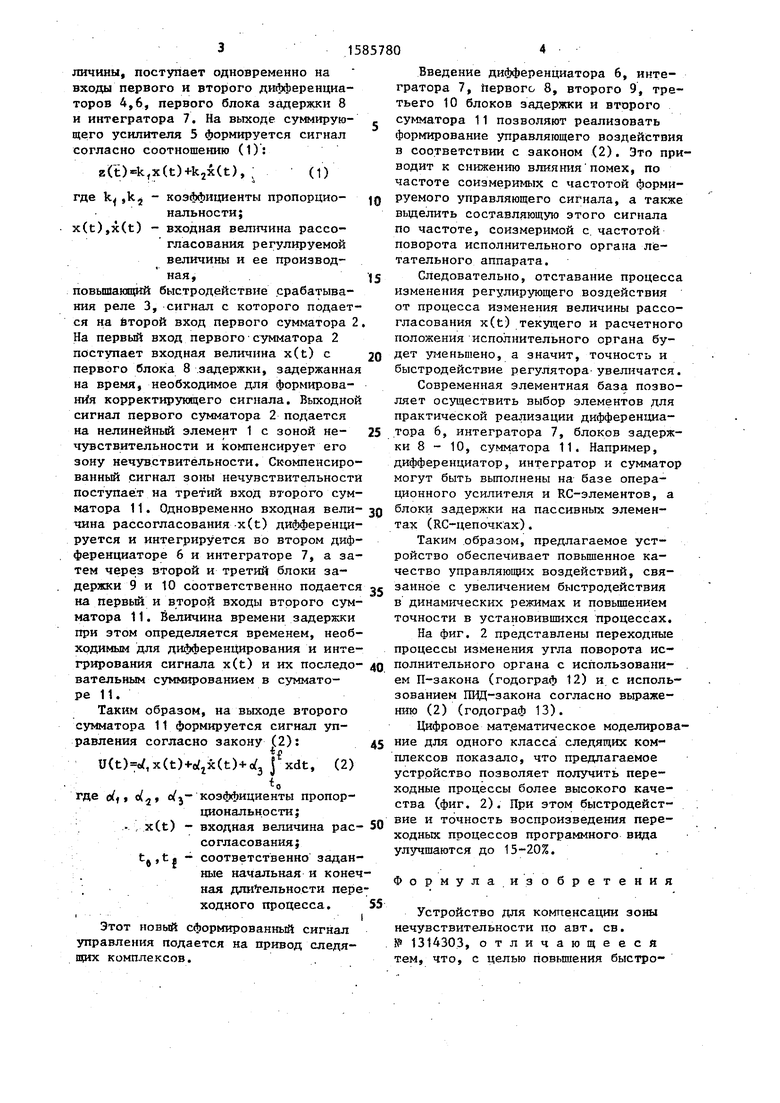
На фиг, 2 представлены переходные процессы изменения угла поворота исполнительного органа с использовани- , ем II-закона (годограф 12) и с использованием ШЗД-закона согласно выражению (2) (годограф 13),
Цифровое мат.ематическое моделирование для одного класса следящих комплексов показало, что предлагаемое устройство позволяет получить переходные процессы более высокого качества (фиг, 2), При этом быстродействие и точность воспроизведения переходных процессов программного вида улучшаются до 15-20%,.
Формулаиз обретения
Устройство для компенсации зоны нечувствительности по авт, ев, hP 1314303 отличающееся тем, что, с целью повьш1ения быстродействия и точности устройства, в не- .го дополнительно введены второй лиф- ференциатор, интегратор, второй сумматор и три блока задержки, причем в;сод первого дифференциатора соединен с первым входом первого сумматора через первый блок задержки, входы второго дифференциатора и интегратора
подключены к входу первого дифференциатора, а их выходы через второй и третий блоки задержки,- соответственно к первому и второму входам второго сумматора, третий вход которого подключен к выходу нелинейного элемента с зоной неч: вствительности, а выход является выходом устройства.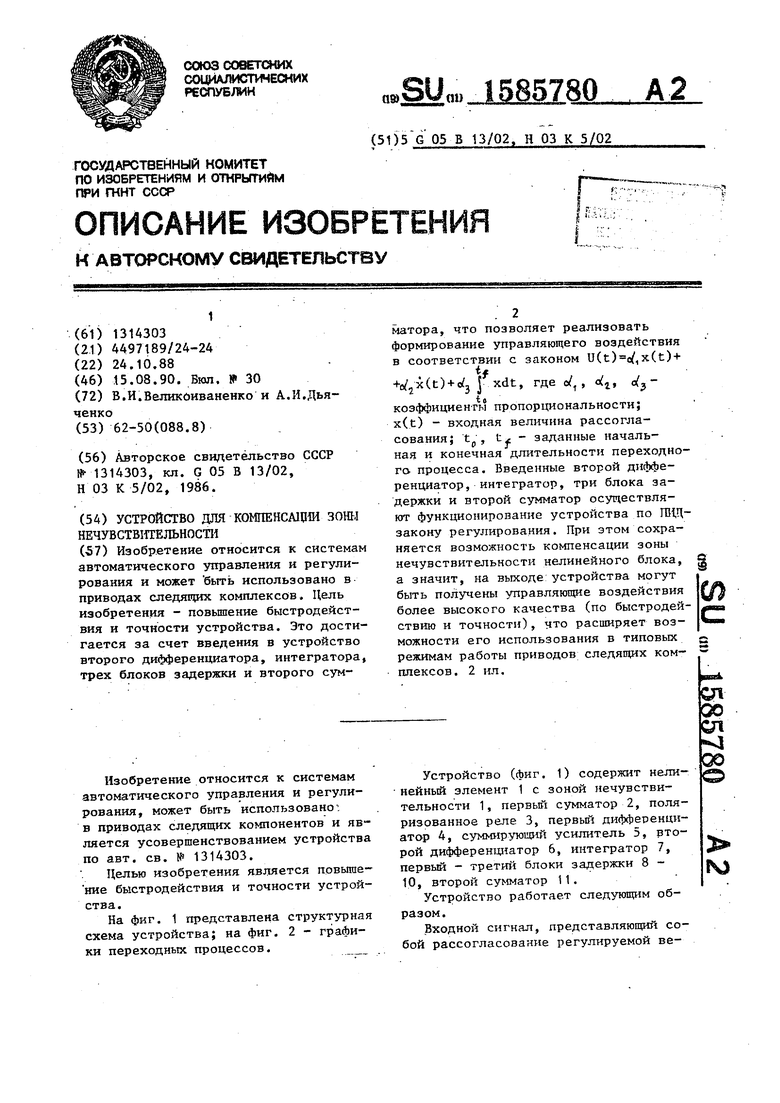
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| Следящая система | 1979 |
|
SU842711A1 |
| Следящая система | 1979 |
|
SU822148A1 |
Изобретение относится к системам автоматического управления и регулирования и может быть использовано в приводах следящих комплексов. Цель изобретения - повышение быстродействия и точности устройства. Это достигается за счет введения в устройство второго дифференциатора, интегратора, трех блоков задержки и второго сумматора, что позволяет реализовать формирование управляющего воздействия в соответствии с законом U(T)=Α 1X(T)+Α 2X .(T)+Α 3 *981 XDT, где α 1, α 2, α 3 - коэффициенты пропорциональности
X(T) - входная величина рассогласования
T 0,T F - заданные начальная и конечная длительности переходного процесса. Введенные второй дифференциатор, интегратор, три блока задержки и второй сумматор осуществляют функционирование устройства по ПИД-закону регулирования. При этом сохраняется возможность компенсации зоны нечувствительности нелинейного блока, а значит, на выходе устройства могут быть получены управляющие воздействия более высокого качества (по быстродействию и точности), что расширяет возможности его использования в типовых режимах работы приводов следящих комплексов. 2 ил.
6 1град.
Фиг.1
| Устройство для компенсации зоны нечувствительности | 1986 |
|
SU1314303A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
