Изобретение относится к гидромеханизации и может быть использовано для управления процессом обрушения забоев при разработке карьеров с прослойками мерзлых грунтов и твердых пород.
Цель изобретения - повышение производительности земснаряда при разработке карьеров с прослойками мерзлых грунтов и твердых пород.
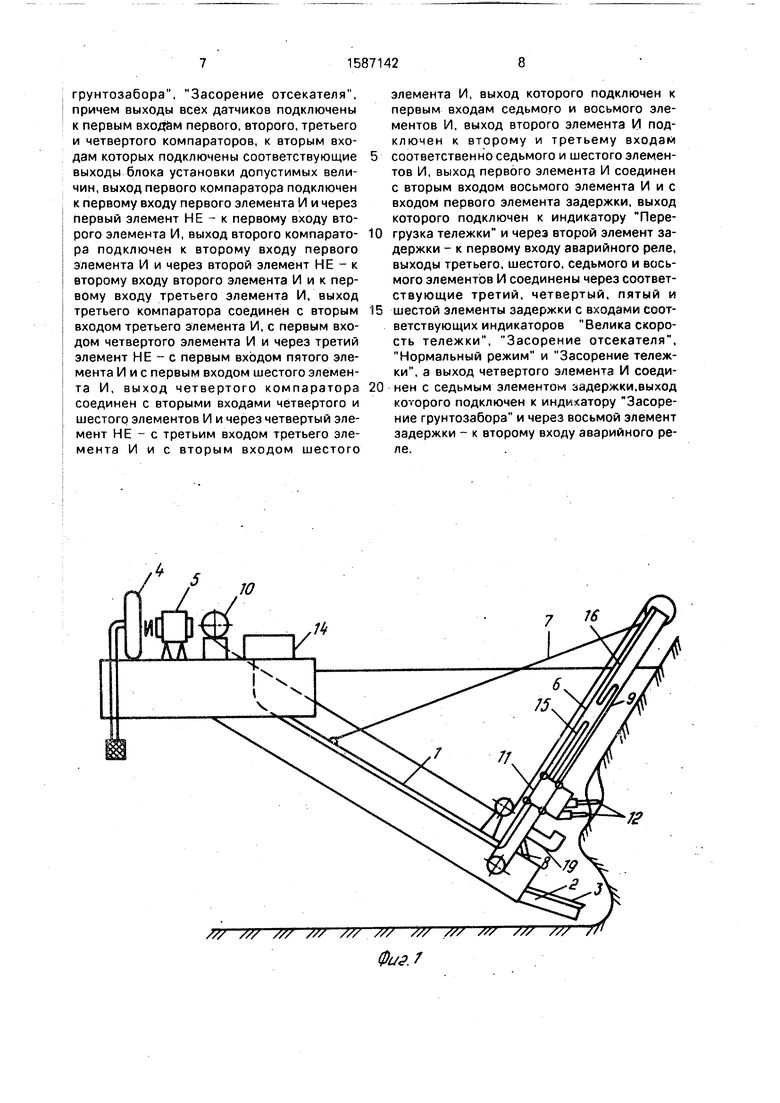
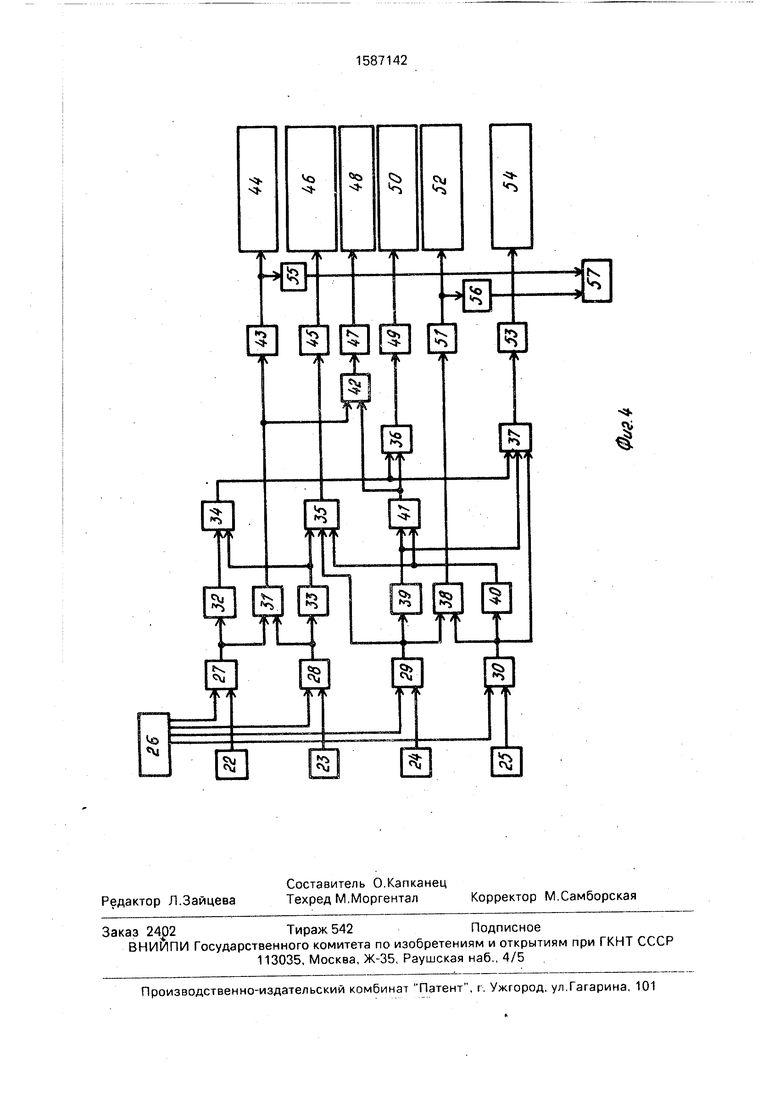
На фиг. 1 изображено устройство в работе,- на фиг.2 - конструкция тележки и рабочего органа: на фиг,3 - конструкция отсекателя; на фиг.4 - функциональная схе- ма устройства для контроля параметров.
Система для управляемого обрушения забоев земснарядом содержит всасывающую трубу 1, конец которой выполнен в виде приемного бункера 2, снабженного гидромониторами 3, которые питаются от водяного насоса 4 с электродвигателем 5, установленных на земснаряде. Рама 6 закреплена посредством тросовой стяжки 7 и упора 8, По направляющим 9 рамы с помощью лебедки 10 и трособлочной системы перемещается тележка 11, выполненная в виде треугольной станины, в углах которой установлены три виброактивных зуба 12 с пневмоприводами 13, питающимися от комел
00 XI
4:5. ю
прессора 14. Возлухоподводящий 15 и воз- духоотводящий 16 шланги закреплены на середине рамы и подключаются к соответствующим патрубкам 17 и 18 пневмоприводов. Выпускной конец воздухоотводящего шланга выведен на поверхность воды и закреплен на верхнем конце рамы. За счет этого достигается сокращение потерь мощности пневмоприводов, вызванных изменением давления воды, и выравнивание мощности при работе на разных глубинах. На нижнем конце рамы установлен отсека- тель 19 грунта, выполненный в виде четырех параллельных лучей 20. соединенных у основания общей станиной 21, которая крепится к раме. Лучи имеют скосы вершин на внешние стороны. Расстояние между лучами зависит от диаметра всасывающей трубы и расстояния между рабочими зубьям и 12 и выбирается таким, чтобы крупные куски грунта, которые могут забить всасывающую трубу, не проходили через отсекатель, а, ударяясь о вершины лучей, отбрасывались в стороны. В нижнем положении тележки вершины лучей отсекателя проходят между рабочими зyбьями что позволяет очищать зубья и отсекатель в случае их засорения.
Усгройство контроля параметров содержит датчик 22 силы натяжения троса и датчик 23 скорости перемещения тележки, которые установлены на лебедке, датчики вакуума 24 и консистенции пульпы 25. которые установлены на конце всасывающей трубы, блок 26 установки допустимых величин, компараторы 27-30, первые входы которых Соединены с выходами соответствующих датчиков 22-25, а вторые входы - с выходами блока 26 установки допустимых величин. Выходы компараторов 27 и 28 соединены с входами элемента И 31 и с входами соответствующих элементов НЕ 32 и 33, выходы которых соединены с входами соот- se. ствующих элементов И 34 и 35. Выход элемента НЕ 33 соединен также с входом элемента И 34, выход которого соединен с входами элементов И 36 и 37. Выходы компараторов 29 и 30 соединены с входами элемента И 38, с входами соответствующих элементов НЕ 39 и 40 и с входами соответствующих элементов И 35 и 37. Выход элемента НЕ 39 соединен с входами элементов И 37 и 41. Выход элемента НЕ 40 соединен с входами элементов И 35 и 41, выход последнего соединен с входами элеметов И 36 и 42. Выход элемента И 31 соединен с входом элемента И 42 и через элемент 43 задержки соединен с входом индикатора 44 Перегрузка тележки, выход элемента И 35 соединен через элемент 45 задержки с индикатором 46 Велика скорость тележки,
выход элемента И 42 соединен через элемент 47 задержки с индикатором 48 Засорение тележки, выход элемента И 36 соединен через элемент 49 задержки с ин- 5 дикатором 50 Нормальный режим, выход элемента И 38 соединен через элемент 51 задержки с индикатором 52 Засорение грунтозабора, выход элемента И 37 соединен через элемент 53 задержки с индикато0 ром 54 Засорение отсекателя, при этом выходы элементов задержки 43 и 51 через соответствующие элементы 55 и 56 задержки подключены к входам аварийного реле 57.
5 Система работает следующим образом. При движении земснаряда вперед гидромониторы 3 разрабатывают грунт и приемный бункер 2 внедряется под основание уступа. Затем нк 1юч5втг,я .a 10, те0 лежка 11 перемещается вверх и разрабатывает подводный забой, снимая слой грунта и предотвращая возможное обрушение крупного массива. При этом в талых грунтах рабочие зубья 12 прорезают ослабляющие
5 щели. Блоки грунта, потеряв сцепление, отделяются от. массива и падают в приемный бункер 2. откуда поступают во всасывающую трубу 1. Если при движении тележки 11 рабочие зубья 12 входят в контакт с твердым
0 грунтом (мерзлота, валуны и др.), то они начинают раскалывать его за счет ударов, обусловленных включением пневматических вибраторов. Мелкие куски грунта ссыпаются вниз, проходят через отсекатель 19
5 и попадают в бункер 2. а крупные куски грунта или валуны ударяются об отсекатель 19 и отбрасываются в сторону.
Устройство контроля следит за состоя0 нйем подводного забоя, грунтозабора и тележки, сравнивая текущие значения вакуума, консистенции пульпы, силы натяжения троса и скорости перемещения тележки с допустимыми. Максимально
5 допустимые величины вёкуума и силы натяжения троса, а также минимально допустимые величины консистенции пульпы и скорости перемещения тележки устанавливаются до начала работы с помощью блока
0 26 установки допустимых величин. При возрастании вакуума и снижении консистенции пульпы за пределы допустимых значений на выходах компараторов 29 и 30 появляются единичные сигналы, которые через элемент
5 И 38 поступают на элемент 51 задержки. Если данная ситуация сохраняется в течение некоторого промежутка времени, порядка 10 с. то она соответствует засорению грунтозабора. По истечении указанного вре- элемент 51 задержк / выргбатывает
сигнал, который включает индикатор 52 Засорение грунтозабора.
Одной из причин засорения грунтозабора может быть чрезмерная скорость разработки грунта, поэтому, если при возрастании вакуума выше допустимого значения скорость движения тележки и консистенция пульпы превышают минимально допустимые, то единичные сигналы с выхода компаратора 29 и с выходов элементов НЕ 33 и 40 поступают на входы элемента И 35 и затем на вход элемента 45 задержки. Через установленное время включается инди| атор Велика скорость тележки.
При возрастании силы натяжения троса и снижения скорости перемещения тележки 11 за пределы допустимых значений на выходах компараторов 27 и 28 появляются единичные сигналы,которые через элемент И 31 поступают на элемент 43 задержки. Через установленное время загорается индикатор Перегрузка тележки.
Одной из причин перегрузки тележки может быть засорение зубьев 12 мерзлой глыбой, валуном и др., поэтому, если при перегрузке тележки 11 величина вакуума и консистенции пульпы находятся в пределах допустимых величин, то единичные сигналы с выходов элементов НЕ 39 и 40 поступают на входы элемента И 41, а с выходов элементов И 31 и 41 поступают на входы элемента И 42 и затем на вход элемента 47 задержки. Через установленное время включается индикатор Засорение тележки.
При снижении консистенции пульпы ниже допустимой величины и нормальных параметрах вакуума, силы натяжения троса и скорости перемещения тележки единичные сигналы поступают с выходов компаратора 30 и элементов НЕ 39, И 34 на входы эгэмента И 37. По истечении времени, оп- редалйемом элементом 53 задержки, включается индикатор Засорение отсекателя. В том случае, когда все контролируемые параметры находятся в допустимых пределах, единичные сигналы поступают с выходов элементов И 34 и 41 на входы элемента И 36, который через установленное элементом 49 задержки время включает индикатор Нормальный режим.
Указанные сигналы позволяют багермейстеру управлять технологическим процессом, своевременно устраняя его нарушения. Например, при засорении отсекателя или тележки он может очистить их, обеспечив свободное падение тележки вниз до упора. При ударе лучи отсекателя проходят между зубьями тележки и проталкивают застрявшие комья. При засорении грунтоза55
бора можно уменьшить скорость перемещения тележки или временно остановить ее до нормализации ситуации. При перегрузке тележки можно уменьшить скорость переме- 5 щения тележки, очистить ее при необходимости или уменьшить количество грунта, захватываемого рабочими зубьями путем маневрирования рамой и т.д.
Если перегрузка тележки или засорение 10 грунтозабора не будут устранены в течение времени, заданного элементами 55 и 56 .- держки соответственно, то аварийное реле 57 остановит лебедку 10, управляющую движением тележки 11, или включит 5 нажную лебедку, управляющую движением всасывающей грубы соответственно. ри устранении перегрузки или засорения аварийное реле 57 возвращается в исходное состояние.
образом, устройство позволяет
управлять обрушением подводного ззбоя, предохраняет грунтозабор от завалов мерзлыми глыбами или валунами и ведет непрерывныйконтрольпараметров5 технологического процесса, что повышает производительность земснаряда за счет сокращения непроизводительных простоев.
30
Формула изобретения
Система для управляемого обрушения забоев земснарядом, включающая гидромониторы, смонтированные на бункере, насос, лебедку и раму с движущейся тележкой, о т- 35 личающаяся тем, что, с целью повышения производительности земснаряда при разработке мерзлых грунтов, она снабжена компрессором, установленным на земснаряде, устройством для контроля парамет- 40 ров, отсекателем грунта, закрепленным на нижнем конце рамы и выполненным в виде четырех параллельных лучей, вершины которых имеют разную высоту и скосы на внешние стороны, тележка выполнена в еи- 5 де треугольной станины, в углах которой установлены три виброактивных зуба с пневмоприводами, при этом воздухоподво- дящий и воздухоотводящий шланги пневмо- вибраторов закреплены на середине рамы, 0 а устройство контроля параметров снабжено датчиком силы натяжения троса, датчиком скорости перемещения тележки, датчиком вакуума и датчиком консистенции пульпы, блоком установки допустимых вели- 5 чин, четырьмя компараторами, восемью элементами И. четырьмя элементами НЕ. восемью элементами задержки, аварийным реле, индикаторами Перегрузка тележки. Велика скорость тележки, Засорение те- лежки. Нормальный режим. Засорение
грунтозабора, Засорение отсекателя, причем выходы всех датчиков подключены к первым вход&м первого, второго, третьего и четвертого компараторов, к вторым входам которых подключены соответствующие выходы блока установки допустимых величин, выход первого компаратора подключен к первому входу первого элемента И и через первый элемент НЕ - к первому входу второго элемента И, выход второго компаратора подключен к второму входу первого элемента И и через второй элемент НЕ - к второму входу второго элемента И и к первому входу третьего элемента И, выход третьего компаратора соединен с вторым входом третьего элемента И, с первым входом четвертого элемента И и через третий элемент НЕ - с первым входом пятого элемента И и с первым входом шестого элемента И, выход четвертого компаратора соединен с вторыми входами четвертого и шестого элементов И и через четвертый элемент НЕ - с третьим входом третьего элемента И и с вторым входом шестого
элемента И, выход которого подключен к первым входам седьмого и восьмого элементов И, выход второго элемента И подключен к второму и третьему входам
соответственно седьмого и шестого элементов И, выход первого элемента И соединен с вторым входом восьмого элемента И и с входом первого элемента задержки, выход которого подключен к индикатору Перегрузка тележки и через второй элемент задержки - к первому входу аварийного реле, выходы третьего, шестого, седьмого и восьмого элементов И соединены через соответствующие третий, четвертый, пятый и
шестой элементы задержки с входами соответствующих индикаторов Велика скорость тележки, Засорение отсекателя, Нормальный режим и Засорение тележки, а выход четвертого элемента И соединен с седьмым элементом задержки,выход которого подключен к индикатору Засорение грунтозабора и через восьмой элемент задержки - к второму входу аварийного реле.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управляемого обрушения подводных забоев земснарядом | 1990 |
|
SU1789608A1 |
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Устройство для контроля технологических параметров процесса грунтозабора земснаряда | 1981 |
|
SU998674A1 |
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Грунтозаборное устройство земснаряда | 1979 |
|
SU870603A1 |

Изобретение относится к гидромеханизации и предназначено для управления процессом обрушения забоев при разработке карьеров. Цель - повышение производительности земснаряда при разработке карьеров с прослойками мерзлых грунтов и твердых пород. Система содержит гидромониторы , смонтированные на бункере, насос, лебедку и раму с движущейся тележкой (Т), выполненной в виде треугольной станины, в углах которой установлены три виброактивных зуба с пневмоприводом. На земснаряде установлен компрессор. На нижнем конце рамы закреплен отсекатель грунта, выполненный в виде четырех параллельных лучей, вершины которых имеют высоту и скосы на внешние стороны. На середине рамы закреплены воздухоподводящий и воздухоотводящий шланги пневмовибраторов. Для контроля за состоянием подводного забоя, грунтозабора и Т система снабжена устройством контроля параметров. Последнее состоит из датчиков силы натяжения троса, скорости перемещения Т, вакуума и консистенции пульпы, блока установки допустимых величин, компараторов, логических элементов И и НЕ, элементов задержки, аварийного реле и индикаторов состояний грунтозабора и Т. Последние включаются при отклонении контролируемых параметров от их допустимых значений, что позволяет багерместеру управлять технологическим процессом, своевременно устраняя его нарушения. 4 ил.
Фи.7
79
71
IX .-s. I/
/ b,e J
(«.7 ,Nl
V
i
/
«
1
/
6;.J
«о
-
«iO
}
г
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управляемого обрушения забоев земснарядом | 1979 |
|
SU861474A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
