Изобретение-относится к гидромеханизации и может быть использовано для управления процессом обрушения подводных забоев при разработке карьеров с прослойками мерзлых грунтов и твердых пород.
Известно устройство для управляемого обрушения забоев земснарядом, содержащее приемный бункер, гидромониторы и раму с налравляющими, по которым движется тележка, выполненная в форме ковша с режущими кромками, снабженными насадками для подачи воды. Оно позволяет разрабатывать сТзязные грунты типа слежавшихся песков, супесей и песчано-гра- вийных смесей с прослойками глин, но неэффективно при разработке твердых пород и мерзлоты. Другим недостатком этого устройства является отсутствие средств контроля за процессом обрушения и грун- тозабора, что может привести к засорению тележки или всасывающего наконечника и снижению производительности земснаряда.
К недостаткам аналога также относится снижение производительности системы за счет потерь грунта, обусловленного выносом значительной его части из зоны всасывания струями напорной воды гидронасадков.
Наиболее близким к изобретению техническим решением является система для управляемого обрушения забоев земснарядом (2), содержащее всасывающую трубу, приемный бункер, гидромониторы, раму с направляющими, по которым движется тележка с виброактивными зубьями, а также компрессор, отсекатель грунта и устройство контроля параметров содержащее датчик вакуума и датчик консистенции пульпы, установленные на всасывающей трубе, четыре компаратора, пять элементов И, три элемента НЕ, семь элементов задержки, индикаторы: Перегрузка, Нормальный режим, Засорение грунтозабора, Засорение тележки (зубьев), Засорение отсека- теля и блок установки допустимых величин, причем первый выход блока подключен к первому входу первого компаратора, выход которого соединен с входом первого элемента НЕ, выход датчика вакуума подключен к одному входу второго компаратора, к другому входу которого подключен второй выход блока установки допустимых величин, выход второго компаратора соединен с первым входом первого элемента И и через второй элемент НЕ - с первым входом второго и третьего элементов И, выход третьего элемента И через первый элемент задержки соединен с индикатором Засорение отсе- кателя, выход первого элемента И соединен через второй элемент задержки с третьим элементом задержки и с индикатором Засорение грунтозабора, выход второго элемента И соединен с первыми входами
четвертого и пятого элементов И, выход четвертого элемента И подключен через четвертый элемент задержки к индикатору Нормальный режим, а выход пятого элемента И подключен через пятый элемент
0 задержки к индикатору Засорение зубьев, второй вход пятого элемента И и вход шестого элемента задержки объединены, а выход шестого элемента задержки подключен к индикатору Перегрузка и входу седьмого
5 элемента задержки, датчик консистенции пульпы подключены к одному входу третье- то компаратора, к другому входу которого подключен третий выход блока установки допустимых величин, выход третьего компа0 ратора соединен с вторыми входами первого и третьего элементов И и через третий элемент НЕ - со вторым входом второго элемента И, третий вход третьего элемента И и второй вход четвертого элемента И объ5 единены, а к входу четвертого компаратора подключен четвертый выход блока установки допустимых величин.
Эта система принята за прототип. Она позволяет управлять обрушением подвод0 ного забоя при разработке мерзлых и твердых грунтов, однако имеет ряд недостатков: во-первых, громоздкая конструкция рамы снижает маневренность земснаряда, во вторых, отсутствие системы контроля пройден5 ного расстояния при углублении в забой затрудняет ориентацию приемного бункера в забое и может привести к опрокидыванию рамы, в-третьих, обуславливает наличие на земснаряде дополнительного оборудовао ния - компрессора.
Кроме того, при выполнении гидромеханизированных работ в северной климатической зоне, для которой характерны короткий летний сезон и большая заторфо5 ванность берегов, акватории земснарядов часто засорены льдом или остатками растительного слоя. В этих условиях рама, выходящая на поверхность воды, снижает эффективность системы управления обру0 шением забоев из-за возможного засорения трособлочной системы, а большая парусность рамы делает систему неустойчивой при сильных волнениях водоема и при уменьшении глубины разработки. К недо5 статкам прототипа также можно отнести и высокую энергоемкость разработки твердых пород грунта.
Экспериментальные исследования способа разработки мерзлых грунтов вибрирующей гидроструей, имеющей давление
порядка 20-30 МПа, показывают его высокую эффективность(Мосин В. Д. Разработка мерзлых грунтов высоконапорной вибрирующей гидроструей. М.: НИИ оснований и подземных сооружений им. Н. М. Герсева- нова, 1985). Это позволяет использовать высоконапорную вибрирующую струю для подводной разработки мерзлых прослоек и одновременно заменить воздушный привод виброактивных зубьев на гидравлический, исключив компрессор, несвойственный для земснаряда, из состава оборудования.
Целью изобретения является повышение эффективности работы системы за счет снижения энергозатрат на рыхление грунта и увеличение точности ориентации земснаряда в забое.
Поставленная цель достигается тем, что шарнирно закрепленная на всасывающей трубе рама выполнена в виде многоступенчатой телескопической стрелы, на крайней верхней ступени которой размещен рыхлитель, выполненный в виде параллельно расположенных зубьев. Каждый зуб рыхлителя состоит из цилиндрической гильзы с дном и коническим дулом, конического ударника, установленного в дуле с возможностью осевого перемещения, и радиально расположенных продольных ограничительных ребер, установленных на внутренней стороне гильзы. Полость гильзы сообщена посредством водовода с источником напорной воды,а угол конусности ударника равен углу конусности дула. Отсекатель грунта имеет высоту боковых ножей меньше центральных, а расстояние между ножами больше внешнего диаметра гильзы. Устройство контроля параметров дополнительно содержит датчик давления привода выдвижения стрелы, датчик линейного перемещения папиль- онажной лебедки, два ключа, три элемента ИЛИ, исполнительный механизм включения папильонажной лебедки, исполнительный механизм включения насоса и индикаторы Аварийное выключение, Останов папиль- онироеания, Максимальная длина стрелы и Минимальная длина стрелы. При этом выход датчика давления привода выдвижения стрелы подключен ко второму входу первого компаратора, выход которого соединен, также, со вторым входом пятого элемента И, выход первого элемента НЕ подключен ко второму входу четвертого элемента И, выход датчика линейного перемещения пяпильонажной лебедки подключен ко второму входу четвертого компаратора, выход которого соединен с первым входом первого элемента ИЛИ, с одним входом исполнительного механизма включения насоса и с индикатором Останов папильонирования, выход первого ключа соединен с первым входом второго элемента ИЛИ с индикатором Максимальная длина стрелы, выход второго ключа подключен к одному входу исполнительного механизма включения папильонирования лебедки и к индикатору Минимальная длина стрелы, выход первого элемента ИЛИ подключен к другому входу исполнительного механизма
0 включения папильонирования лебедки, а выход второго элемента ИЛИ подключен ко второму входу исполнительного механизма включения насоса, выход третьего элемента задержки подключен к первому входу треть5 его элемента ИЛ И и ко второму входу первого элемента ИЛИ, выход седьмого элемента задержки соединен со вторыми входами второго и третьего элементов ИЛИ, выход третьего элемента ИЛИ подключен к инди0 катору Аварийное выключение.
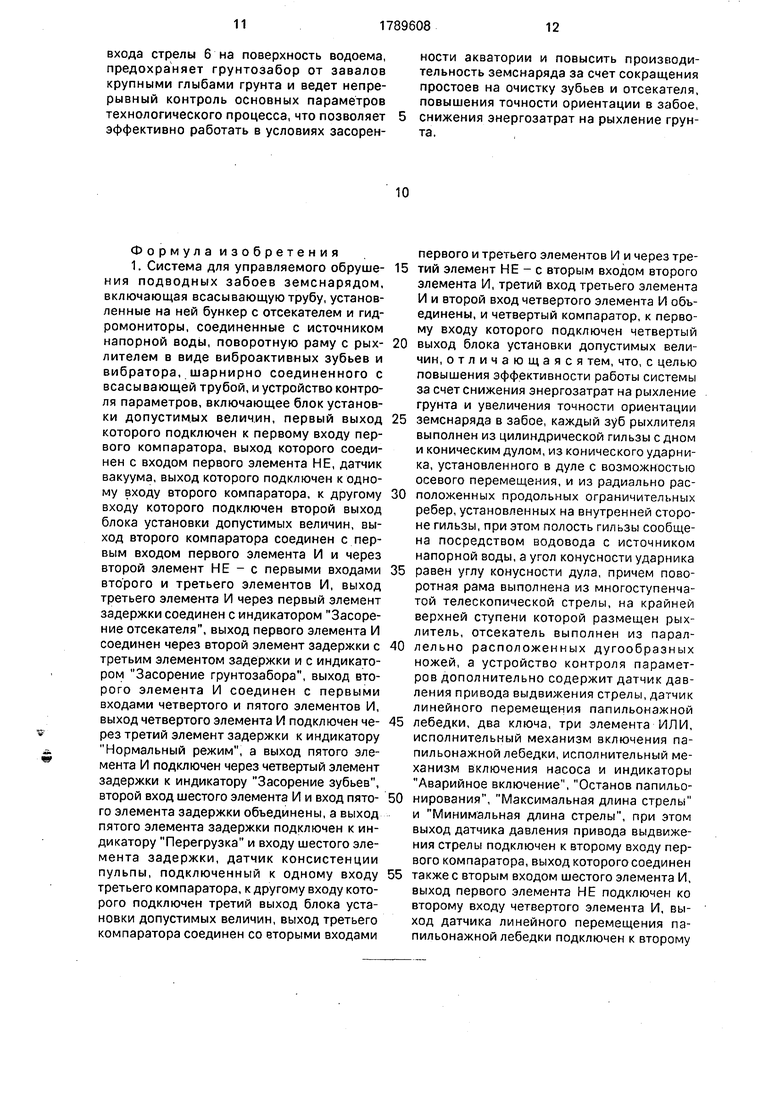
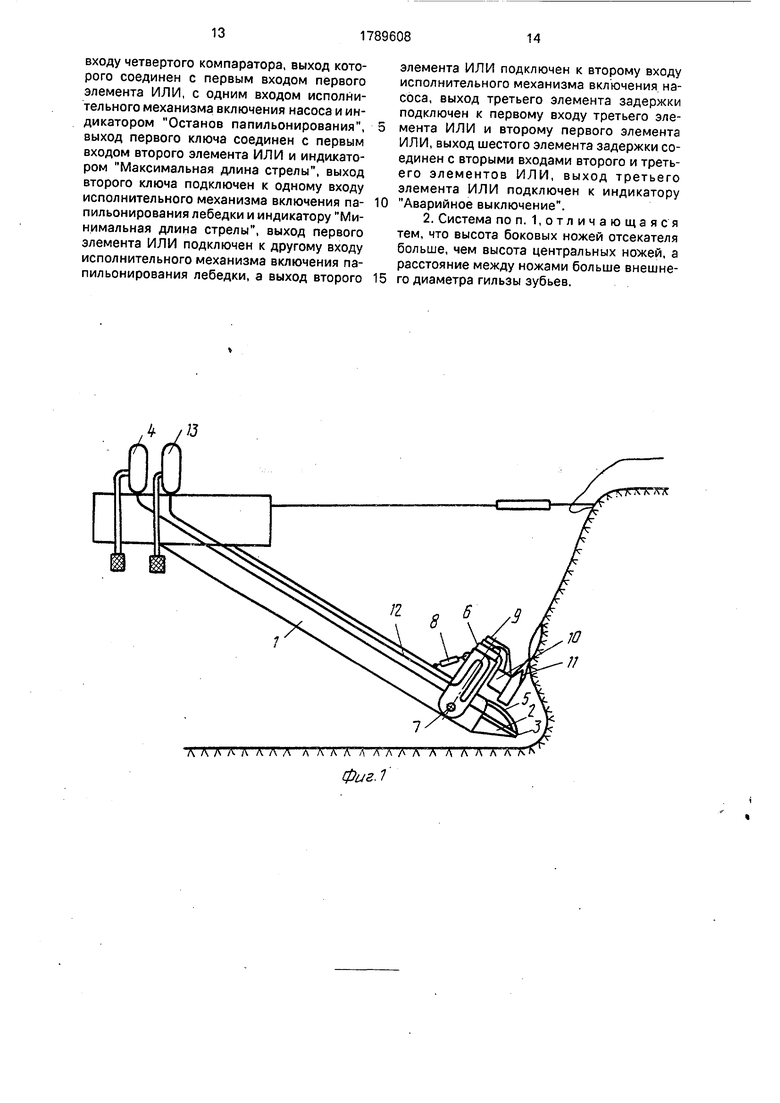
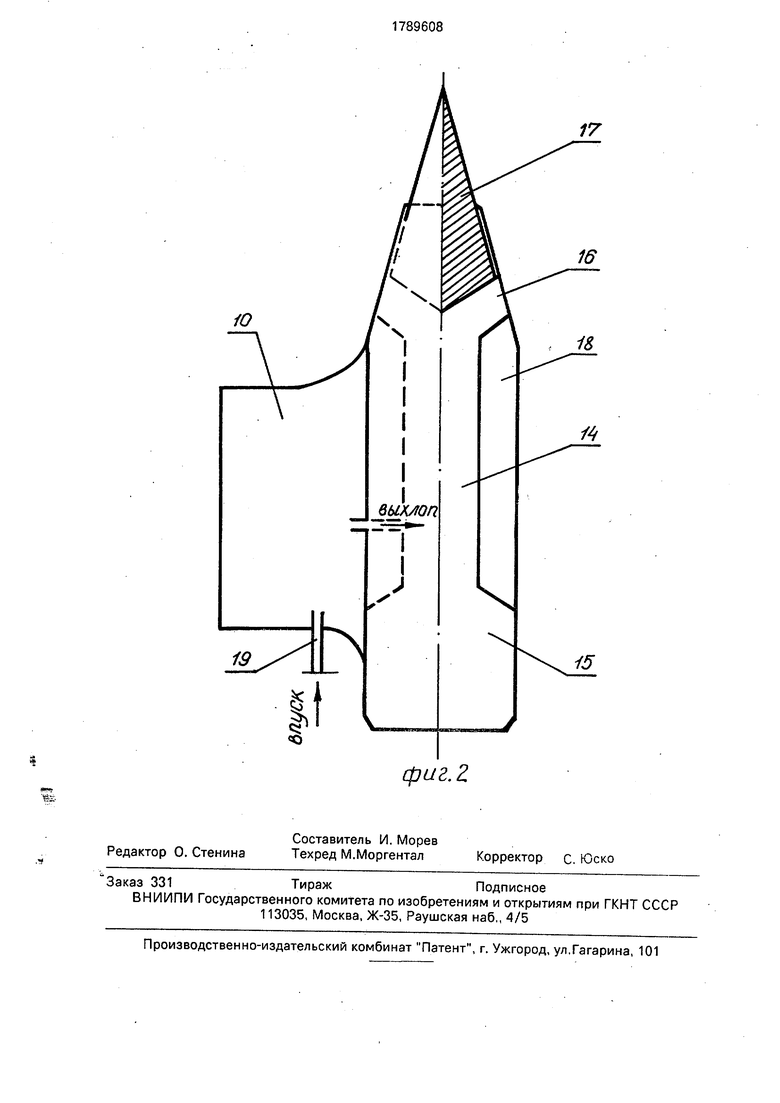
На фиг. 1 изображена система в работе; на фиг. 2 - конструкция рабочего зуба, на фиг. 3 - функциональная схема устройства контроля параметров.
5 Система, как и в прототипе, смонтирована на всасывающей трубе 1, конец которой выполнен в виде бункера 2, снабженного отсекателем грунта 5 и гидромониторами 3, которые питаются от водяного
0 насоса 4, установленного на земснаряде. Телескопическая стрела 6 закреплена на всасывающей трубе 1 с помощью шарнирного соединения 7 и снабжена гидроприводом 8. Верхний конец телескопической
5 стрелы 6 соединен амортизатором 9 с гидравлическим вибратором 10, на котором закреплены рабочие зубья 11. Гидравлический вибратор 10 и рабочие зубья 11 соединены общим гибким водоводом 12 с
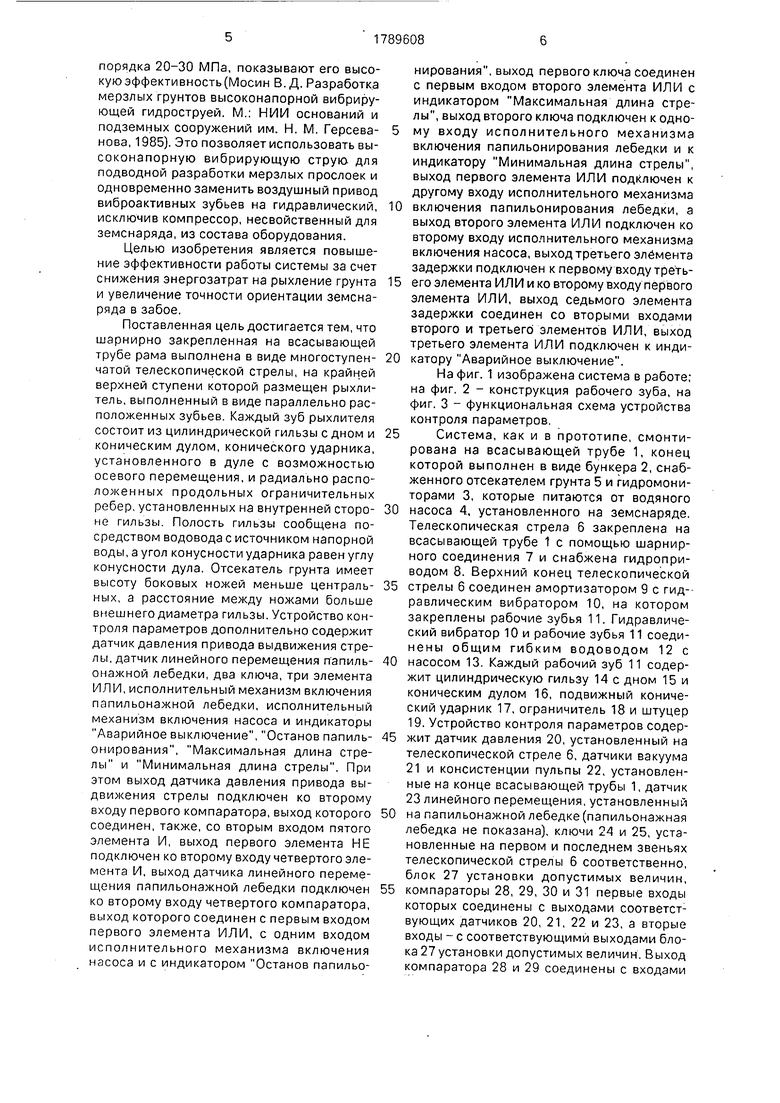
0 насосом 13. Каждый рабочий зуб 11 содержит цилиндрическую гильзу 14 с дном 15 и коническим дулом 16, подвижный конический ударник 17, ограничитель 18 и штуцер 19. Устройство контроля параметров содер5 жит датчик давления 20, установленный на телескопической стреле 6, датчики вакуума 21 и консистенции пульпы 22, установленные на конце всасывающей трубы 1, датчик 23 линейного перемещения, установленный
0 на папильонажной лебедке (папильонажная лебедка не показана), ключи 24 и 25, установленные на первом и последнем звеньях телескопической стрелы 6 соответственно, блок 27 установки допустимых величин,
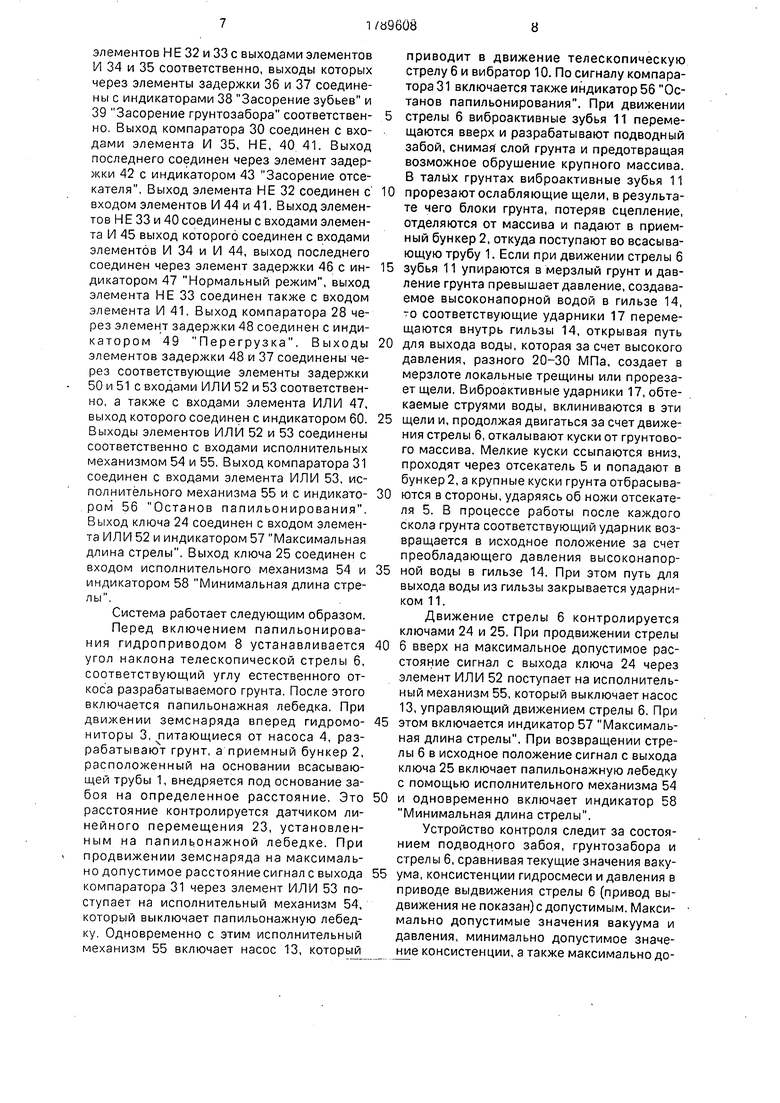
5 компараторы 28, 29, 30 и 31 первые входы которых соединены с выходами соответствующих датчиков 20, 21, 22 и 23, а вторые входы - с соответствующими выходами блока 27 установки допустимых величин. Выход компаратора 28 и 29 соединены с входами
элементов НЕ 32 и 33 с выходами элементов И 34 и 35 соответственно, выходы которых через элементы задержки 36 и 37 соединены с индикаторами 38 Засорение зубьев и 39 Засорение грунтозабора соответственно. Выход компаратора 30 соединен с входами элемента И 35, НЕ, 40 41. Выход последнего соединен через элемент задержки 42 с индикатором 43 Засорение отсе- кателя, Выход элемента НЕ 32 соединен с входом элементов И 44 и 41, Выход элементов НЕ 33 и 40 соединены с входами элемента I/I 45 выход которого соединен с входами элементов И 34 и И 44, выход последнего соединен через элемент задержки 46 с индикатором 47 Нормальный режим, выход элемента НЕ 33 соединен также с входом элемента И 41. Выход компаратора 28 через элемент задержки 48 соединен с индикатором 49 Перегрузка. Выходы элементов задержки 48 и 37 соединены через соответствующие элементы задержки 50 и 51 с входами ИЛИ 52 и 53 соответственно, а также с входами элемента ИЛИ 47, выход которого соединен с индикатором 60. Выходы элементов ИЛИ 52 и 53 соединены соответственно с входами исполнительных механизмом 54 и 55. Выход компаратора 31 соединен с входами элемента ИЛИ 53, исполнительного механизма 55 и с индикатором 56 Останов папильонирования. Выход ключа 24 соединен с входом элемента ИЛИ 52 и индикатором 57 Максимальная длина стрелы. Выход ключа 25 соединен с входом исполнительного механизма 54 и индикатором 58 Минимальная длина стрелы.
Система работает следующим образом.
Перед включением папильонирования гидроприводом 8 устанавливается угол наклона телескопической стрелы 6, соответствующий углу естественного откоса разрабатываемого грунта. После этого включается папильонажная лебедка. При движении земснаряда вперед гидромониторы 3, питающиеся от насоса 4, разрабатывают грунт, а приемный бункер 2, расположенный на основании всасывающей трубы 1, внедряется под основание забоя на определенное расстояние. Это расстояние контролируется датчиком линейного перемещения 23, установленным на папильонажной лебедке. При продвижении земснаряда на максимально допустимое расстояниесигнал с выхода компаратора 31 через элемент ИЛИ 53 поступает на исполнительный механизм 54, который выключает папильонажную лебедку. Одновременно с этим исполнительный механизм 55 включает насос 13, который
приводит в движение телескопическую стрелу 6 и вибратор 10. По сигналу компаратора 31 включается также индикатор 56 Останов папильонирования. При движении
стрелы 6 виброактивные зубья 11 перемещаются вверх и разрабатывают подводный забой, снимая слой грунта и предотвращая возможное обрушение крупного массива. В талых грунтах виброактивные зубья 11
0 прорезают ослабляющие щели, в результате чего блоки грунта, потеряв сцепление, отделяются от массива и падают в приемный бункер 2, откуда поступают во всасывающую трубу 1. Если при движении стрелы 6
5 зубья 11 упираются в мерзлый грунт и давление грунта превышает давление, создаваемое высоконапорной водой в гильзе 14, то соответствующие ударники 17 перемещаются внутрь гильзы 14, открывая путь
0 для выхода воды, которая за счет высокого давления, разного 20-30 МПа, создает в мерзлоте локальные трещины или прорезает щели, Виброактивные ударники 17, обтекаемые струями воды, вклиниваются в эти
5 щели и, продолжая двигаться за счет движения стрелы 6, откалывают куски от грунтового массива. Мелкие куски ссыпаются вниз, проходят через отсекатель 5 и попадают в бункер 2, а крупные куски грунта отбрасыва0 ются в стороны, ударяясь об ножи отсекате- ля 5. В процессе работы после каждого скола грунта соответствующий ударник возвращается в исходное положение за счет преобладающего давления высоконапор5 ной воды в гильзе 14. При этом путь для выхода воды из гильзы закрывается ударником 11.
Движение стрелы 6 контролируется ключами 24 и 25. При продвижении стрелы
0 6 вверх на максимальное допустимое расстояние сигнал с выхода ключа 24 через элемент ИЛИ 52 поступает на исполнительный механизм 55, который выключает насос 13, управляющий движением стрелы 6. При
5 этом включается индикатор 57 Максимальная длина стрелы. При возвращении стрелы 6 в исходное положение сигнал с выхода ключа 25 включает папильонажную лебедку с помощью исполнительного механизма 54
0 и одновременно включает индикатор 58 Минимальная длина стрелы.
Устройство контроля следит за состоянием подводного забоя, грунтозабора и стрелы 6, сравнивая текущие значения ваку5 ума, консистенции гидросмеси и давления в приводе выдвижения стрелы 6 (привод выдвижения не показан) с допустимым. Максимально допустимые значения вакуума и давления, минимально допустимое значение консистенции, а также максимально допустимое расстояние папильонирования устанавливаются до начала работы с помощью блока 27 установки допустимых величин. В процессе работы системы контролируются следующие ситуации:
1) При увеличении скорости папильони- рования выше номинальной возрастает вакуум во всасывающей трубе 1 и снижается консистенция гидросмеси. Если они выходят за пределы допустимых значений, то на выходах компаратора 29 и 30 появляются единичные сигналы, которые через элемент И 35 поступают на элемент задержки 37. Если данная ситуация сохраняется в течение некоторого промежутка времени, порядка Юс, то она соответствует засорению грунтозабора. По истечении указанного времени элемент задержки 37 вырабатывает сигнал, который включает индикатор 39 Засорение грунтозабора.
2) При увеличении скорости стрелы 6 выше номинальной для данной категории грунта возрастает давление в приводе выдвижении стрелы 6 выше допустимого значения. Это приводит к тому, что на выходе компаратора 28 появляется сигнал, который поступает на элемент задержки 48 и через установленное время включает индикатор 49 Перегрузка.
3) Одной из причин перегрузки может быть засорение зубьев мерзлой глыбой, валуном и др., поэтому если при перегрузке величины вакуума и консистенции гидросмеси находятся в пределах допустимых значений, то единичные сигналы с выходов элемента И 46 и компаратора 28 поступают на входы элемента 34 и затем на вход элемента задержки 36. При сохранении этой ситуации в течение установленного времени включается индикатор 38 Засорение зубьев.
4) При снижении консистенции гидросмеси ниже минимально допустимой величины и нормальных параметрах вакуума и давления единичные сигналы поступают с выходов компаратора 30 и элементов НЕ 32 и 33 на входы элемента И 41. По истечении времени, определяемого элементом задержки 42, включается индикатор 43 Засорение отсекателя.
5) В том случае, когда все контролируемые параметры находятся в допустимых пределах, единичные сигналы поступают с выходов элементов И 45 и НЕ 32 на входы элемента И 44, который через элемент задержки 46 включает индикатор 47 Нормальный режим.
Указанные сигналы позволяют багер- мейстеру управлять технологическим процессом, своевременно устраняя его
нарушения. Например, при засорении отсекателя 5 или зубьев 11 он может очистить их, опустив стрелу 6 вниз до упора с последующим изменением угла наклона стрелы 6,
При этом рабочие зубья 11 проходят между ножами отсекателя 5 и разрушают или проталкивают застрявшие комья. При засорении грунтозабора можно уменьшить скорость выдвижения стрелы 6 путем умень0 шения давления в приводе выдвижения или временно остановить выдвижение до нормализации ситуации. При перегрузке привода выдвижения стрелы 6 можно уменьшить количество грунта захватываемого рабочи5 ми зубьями 11 путем изменения угла наклона стрелы б.
Если засорение грунтозабора при перегрузке не будут устранены в течение времени, заданного элементами задержки 50 и 51,
0 то управляющие сигналы поступают через элементы ИЛИ 52 и 53 на исполнительные механизмы 54 и 55 соответственно и выключают папильонажную лебедку и насос 13, управляющий движение стрелы 6. Сигнал с
5 входа элемента ИЛИ 47 включают индикатор 60 Аварийное выключение. При устранении причин, вызывающих засорение или перегрузку, выключается индикатор 60 и ба- гермейстер продолжает работу.
0 Элементы системы могут быть выполнены следующим образом.
Исполнительные механизмы 54 и 55, предназначенные для включения и выключения электродвигателей папильонажной
5 лебедки и насоса гидропривода стрелы соответственно, представляют собой сдвоенные электромеханические реле. Первое реле, включаясь, замыкает замыкающие контакты электромагнитного пускателя,
0 контакты которого включают фазные обмотки двигателя, а второе реле, включаясь, размыкает размыкающие контакты пускателя, который выключает двигатель. Такая конструкция обеспечивает выключения элект5 родвигателя в случае одновременного поступления сигналов на оба входа исполнительного механизма, который возможен при нарушении работы системы. Ключи 24 и 25 могут быть выполнены в виде механиче0 ских контактов, которые соединяют свои выходы с источником единичного сигнала. Элементы задержки и датчики не отличаются от аналогичных элементов задержки и датчиков, приведенных в прототипе и вы5 полняют те же функции. Элементы И, ИЛИ, НЕ, компараторы и блок установки допустимых величин могут быть выполнены на интегральных микросхемах серии К 176 и др. Таким образом, система позволяет управлять обрушением подводного забоя без
входа стрелы 6 на поверхность водоема, предохраняет грунтозабор от завалов крупными глыбами грунта и ведет непрерывный контроль основных параметров технологического процесса, что позволяет эффективно работать в условиях засоренности акватории и повысить производительность земснаряда за счет сокращения простоев на очистку зубьев и отсекателя, повышения точности ориентации в забое, снижения энергозатрат на рыхление грунта.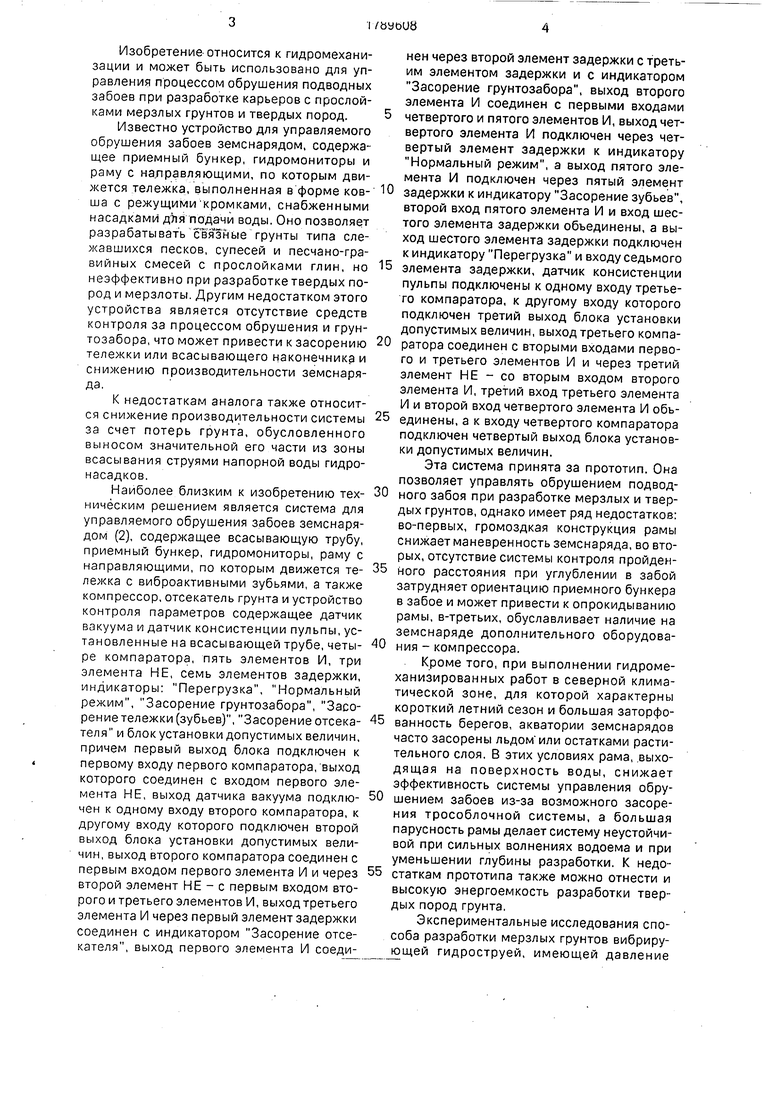
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управляемого обрушения забоев земснарядом | 1988 |
|
SU1587142A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для поддержания заданного момента на валу привода черпаковой цепи многочерпакового земснаряда | 1986 |
|
SU1406303A1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| ЗЕМСНАРЯД | 2004 |
|
RU2285090C2 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство автоматизированного управления земснарядом | 1987 |
|
SU1497358A1 |
Использование: в гидромеханизации. Сущность изобретения: система содержит: датчик давления 20; датчик вакуума 21; датчик консистенции пульпы 22; датчик линейного перемещения 24; два ключа 24 и 25; блок установки получаемых величин 27; четыре компаратора 28-31; три элемента НЕ 32, 33, 40; три элемента ИЛИ 47, 52, 53; пять элементов И 34,35,41,44,45; шесть элементов задержки 36, 37, 42, 46, 48, 50; два исполнительных механизма 54, 55; девять индикаторов Перегрузка 49; Засорение зубьев 38; Нормальный режим 47; Засорение грунтозабора 39; Засорение отсека- теля 43; Аварийное выключение 60; Останов папильонирования 56; Максимальная длина стрелы 57; Минимальная длина стрелы 58. 1 з. п. ф-лы, 3 ил. (/) С
Ф о р м у л а и з о б р е т е н и я 1. Система для управляемого обрушения подводных забоев земснарядом, включающая всасывающую трубу, установленные на ней бункер с отсекателем и гидромониторы, соединенные с источником напорной воды, поворотную раму с рыхлителем в виде виброактивных зубьев и вибратора, шарнирно соединенного с всасывающей трубой, и устройство контроля параметров, включающее блок установки допустимых величин, первый выход которого подключен к первому входу первого компаратора, выход которого соединен с входом первого элемента НЕ, датчик вакуума, выход которого подключен к одному входу второго компаратора, к другому входу которого подключен второй выход блока установки допустимых величин, выход второго компаратора соединен с первым входом первого элемента И и через второй элемент НЕ - с первыми входами второго и третьего элементов И, выход третьего элемента И через первый элемент задержки соединен с индикатором Засорение отсекателя, выход первого элемента И соединен через второй элемент задержки с третьим элементом задержки и с индикатором Засорение грунтозабора, выход второго элемента И соединен с первыми входами четвертого и пятого элементов И, выход четвертого элемента И подключен через третий элемент задержки к индикатору Нормальный режим, а выход пятого элемента И подключен через четвертый элемент задержки к индикатору Засорение зубьев, второй вход шестого элемента И и вход пятого элемента задержки объединены, а выход пятого элемента задержки подключен к индикатору Перегрузка и входу шестого элемента задержки, датчик консистенции пульпы, подключенный к одному входу третьего компаратора, к другому входу которого подключен третий выход блока установки допустимых величин, выход третьего компаратора соединен со вторыми входами
первого и третьего элементов И и через третий элемент НЕ - с вторым входом второго элемента И, третий вход третьего элемента И и второй вход четвертого элемента И объединены, и четвертый компаратор, к первому входу которого подключен четвертый
выход блока установки допустимых величин, отличающаяся тем, что, с целью повышения эффективности работы системы за счет снижения энергозатрат на рыхление грунта и увеличения точности ориентации
земснаряда в забое, каждый зуб рыхлителя выполнен из цилиндрической гильзы с дном и коническим дулом, из конического ударника, установленного в дуле с возможностью осевого перемещения, и из радиально расположенных продольных ограничительных ребер, установленных на внутренней стороне гильзы, при этом полость гильзы сообщена посредством водовода с источником напорной воды, а угол конусности ударника
равен углу конусности дула, причем поворотная рама выполнена из многоступенчатой телескопической стрелы, на крайней верхней ступени которой размещен рыхлитель, отсекатель выполнен из параллельно расположенных дугообразных ножей, а устройство контроля параметров дополнительно содержит датчик давления привода выдвижения стрелы, датчик линейного перемещения папильонажной
лебедки, два ключа, три элемента ИЛИ, исполнительный механизм включения папильонажной лебедки, исполнительный механизм включения насоса и индикаторы Аварийное включение, Останов папильонирования, Максимальная длина стрелы и Минимальная длина стрелы, при этом выход датчика давления привода выдвижения стрелы подключен к второму входу первого компаратора, выход которого соединен
также с вторым входом шестого элемента И, выход первого элемента НЕ подключен ко второму входу четвертого элемента И, выход датчика линейного перемещения папильонажной лебедки подключен к второму
входу четвертого компаратора, выход которого соединен с первым входом первого элемента ИЛИ, с одним входом исполнительного механизма включения насоса и индикатором Останов папильонирования, выход первого ключа соединен с первым входом второго элемента ИЛИ и индикатором Максимальная длина стрелы, выход второго ключа подключен к одному входу исполнительного механизма включения папильонирования лебедки и индикатору Минимальная длина стрелы, выход первого элемента ИЛИ подключен к другому входу исполнительного механизма включения папильонирования лебедки, а выход второго
0
элемента ИЛИ подключен к второму входу исполнительного механизма включения насоса, выход третьего элемента задержки подключен к первому входу третьего элемента ИЛИ и второму первого элемента ИЛИ, выход шестого элемента задержки соединен с вторыми входами второго и третьего элементов ИЛИ, выход третьего элемента ИЛИ подключен к индикатору Аварийное выключение.
Фиг. Т
| Устройство для управляемого обрушения забоев земснарядом | 1979 |
|
SU861474A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система для управляемого обрушения забоев земснарядом | 1988 |
|
SU1587142A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
