Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов в условиях внешнего нагружения, может быть преимущественно использовано при проектировании и создании перспективных систем управления объектами ограниченной жесткости и является усовершенствованием изобретения по авторскому свидетельству №1596306 [1] (прототип).
Целью изобретения является повышение быстродействия устройства.
Функциональная схема устройства [1] представлена на фиг 1. Устройство содержит объект 1 управления (подвижное основание), присоединенный к нему упругий элемент 2, датчик 3 отклонения, дифференцирующий блок 4, регулятор 5 жесткости, блок 6 формирования управления жесткостью, блок 7 формирования функции переключения, акселерометр 8.
Блок 6 формирования управления жесткостью состоит из схемы 12 сравнения знаков, двух релейных элементов 13 и 14, сумматора 15.
Блок 7 формирования функции переключения включает два делителя 9 и 10, сумматор 11.
Это устройство реализует закон управления жесткостью упругого элемента в виде:

где q,  - фазовые координата и скорость упругого элемента; ωmax, ωmin - максимальная и минимальная частоты колебаний упругого элемента из диапазона возможных изменении;
- фазовые координата и скорость упругого элемента; ωmax, ωmin - максимальная и минимальная частоты колебаний упругого элемента из диапазона возможных изменении;  - стационарное положение упругого элемента при максимальной жесткости;
- стационарное положение упругого элемента при максимальной жесткости;  ;
;  - ускорение подвижного (вращающегося) основания; J - момент инерции подвижного основания; В - коэффициент взаимовлияния основания и упругого элемента; m - масса упругого элемента;
- ускорение подвижного (вращающегося) основания; J - момент инерции подвижного основания; В - коэффициент взаимовлияния основания и упругого элемента; m - масса упругого элемента;  - уравнение линии переключения жесткости; θ - угол логики.
- уравнение линии переключения жесткости; θ - угол логики.
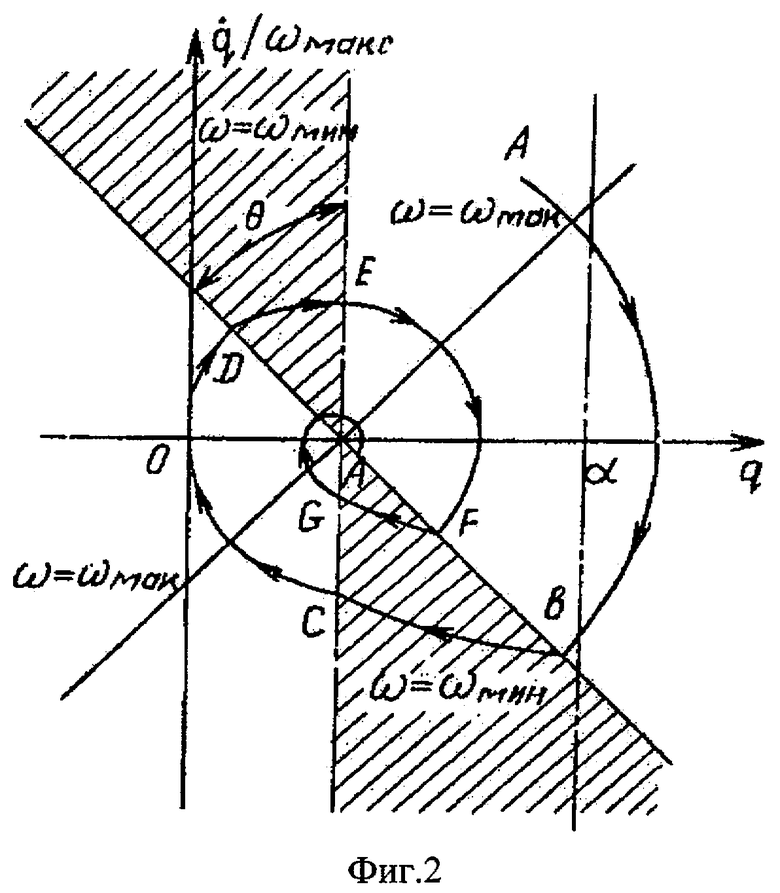
Типовая фазовая траектория упругого элемента, реализующаяся при использовании устройства [1] в условиях действия постоянного нагружения, показана на фиг.2. Здесь  где
где 
Характерным является спиралевидность траектории, скручивающейся к стационарному положению ( , 0). Этот факт "наследован" от логики [2], построенной для гашения свободных колебаний упругого элемента. При недостаточно широком диапазоне регулирования частоты упругого элемента скручивание спирали - фазовой траектории оказывается медленным, и процесс перевода упругой системы в стационарное состояние (, 0) может существенно затянуться. Вместе с тем, для нагруженного упругого элемента существует возможность его приведения в требуемое стационарное положение по апериодической "попадающей" траектории. При этом время гашения вибраций сокращается.
, 0). Этот факт "наследован" от логики [2], построенной для гашения свободных колебаний упругого элемента. При недостаточно широком диапазоне регулирования частоты упругого элемента скручивание спирали - фазовой траектории оказывается медленным, и процесс перевода упругой системы в стационарное состояние (, 0) может существенно затянуться. Вместе с тем, для нагруженного упругого элемента существует возможность его приведения в требуемое стационарное положение по апериодической "попадающей" траектории. При этом время гашения вибраций сокращается.
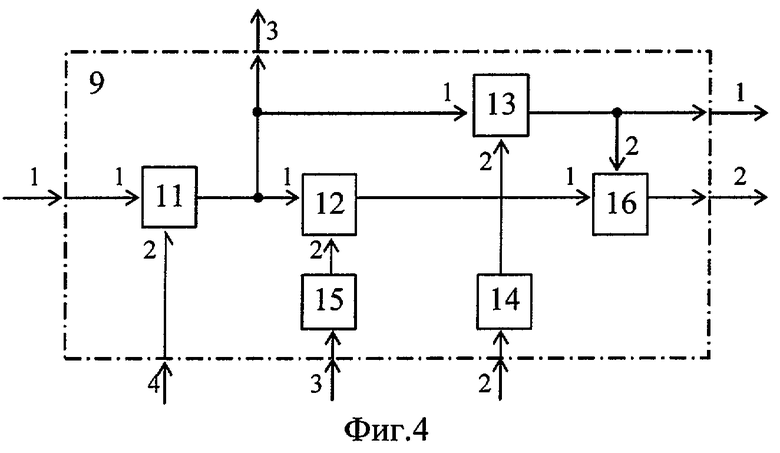
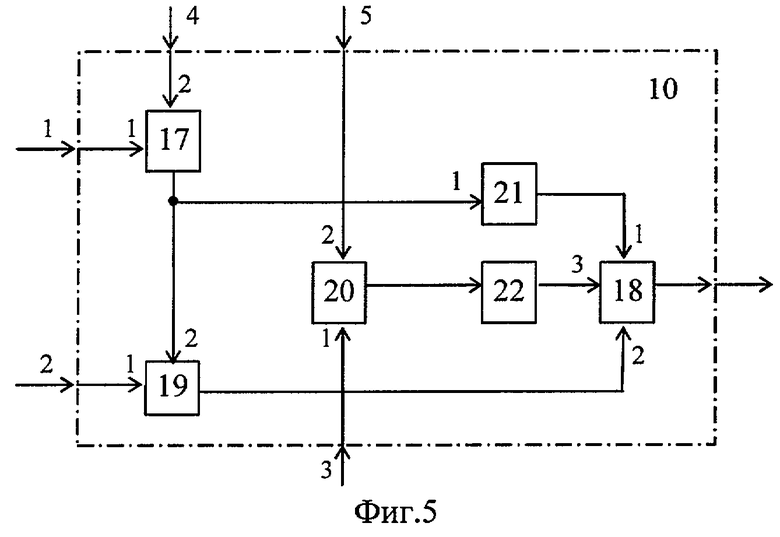
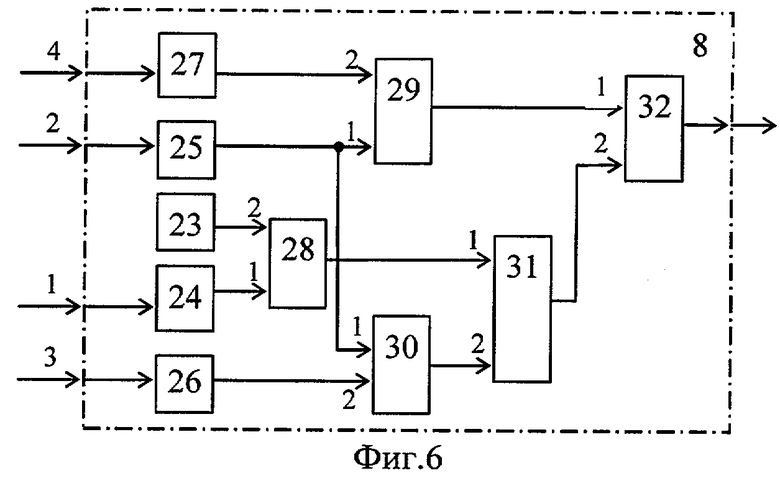
На фиг.3 представлена функциональная схема предлагаемого устройства, на фиг.4 - структурная схема блока расчета внешнего нагружения и стационарных положений, на фиг.5 - то же, блока расчета линии переключения, на фиг.6 - то же, блока формирования управления.
Устройство для подавления вибраций упругого элемента переменной жесткости (фиг.3) содержит: подвижное основание 1, присоединенный к нему упругий элемент 2, регулятор 3 жесткости, датчик 4 отклонений, дифференцирующий блок 5, акселерометр 6, блок 7 формирования функции переключения, блок 8 формирования управления жесткостью.
Блок 7 формирования функции переключения состоит из блока 9 расчета внешнего нагружения и стационарных положений, блока 10 расчета линии переключения.
Блок 9 расчета внешнего нагружения и стационарных положений (фиг.4) содержит: блок 11 умножения, первый и второй делители 12 и 13, первый и второй квадраторы 14 и 15, сумматор 16.
Блок 10 расчета линии переключения (фиг.5) содержит: первый и второй сумматоры 17 и 18, блок умножения 19, делитель 20, первый и второй квадраторы 21 и 22.
Блок 8 формирователя управления жесткостью (фиг.6) содержит: источник 23 постоянного напряжения, первый-четвертый релейные элементы 24-27, первую-третью схемы сравнения знаков 28-30, элемент И 31, элемент ИЛИ 32.
В основу изобретения положено следующее.
Динамика слабодемфированного упругого элемента на подвижном основании может быть представлена в виде [3, 4]
где  - фактор внешнего нагружения упругого элемента, связанный с силами инерции, обусловленными движением основания; - ускорение основания; В - коэффициент взаимовлияния основания и упругого элемента; q1, q2 - обобщенные координата и скорость колебаний упругого элемента соответственно, m, ω - масса и собственная частота колебаний упругого элемента;
- фактор внешнего нагружения упругого элемента, связанный с силами инерции, обусловленными движением основания; - ускорение основания; В - коэффициент взаимовлияния основания и упругого элемента; q1, q2 - обобщенные координата и скорость колебаний упругого элемента соответственно, m, ω - масса и собственная частота колебаний упругого элемента;  - управляющий параметр; ωmax, ωmin - максимальное и минимальное значения собственной частоты колебаний упругого элемента из диапазона возможных изменений.
- управляющий параметр; ωmax, ωmin - максимальное и минимальное значения собственной частоты колебаний упругого элемента из диапазона возможных изменений.
Заметим, что динамика нагруженного упругого элемента переменной жесткости (1) качественно в значительной мере отличается от динамики свободного осциллятора, задача оптимального по быстродействию гашения колебаний которого поставлена и решена в работах [5-8]. Отличие это проявляется, прежде всего, в том, что стационарная точка (положение устойчивого равновесия) нагруженного упругого элемента не совпадает с началом координат его фазовой плоскости, а определяется действующим нагруженном f(t). Иными словами, недеформированное состояние нагруженного упругого элемента является неустойчивым.
В силу независимости нагружения f(t) от управления V невозможно только лишь целенаправленным изменением жесткости устранить вынужденное движение упругого элемента, но можно и, с технической точки зрения необходимо, управлять его вибрациями относительно траектории вынужденного движения. В этой связи представляется целесообразным осуществлять перевод упругого элемента в стационарное состояние, отвечающее конечному моменту Т интервала управления. Вместе с тем, в общем случае любое изменение внешнего нагружения при t>Т неизбежно приводит к смещению стационарной точки на фазовой плоскости и возникновению колебаний вокруг нее, что само по себе диктует необходимость решения новой задачи управления. Таким образом, всякая вариация внешнего нагружения при отсутствии колебаний продуцирует задачу подавления вибраций упругого элемента. С другой стороны, принадлежность функций f(t) внешнего нагружения к весьма широкому классу, как правило, не позволяет на начальном этапе управления точно аппроксимировать значение f(T) на достаточно продолжительный интервал, что препятствует получению полезного на практике решения в аналитическом виде.
В то же время при высокой эффективности подавления вибраций длительность T интервала управления, вообще говоря, сокращается. В пределе она может стать весьма малой, и тогда задача гашения колебаний может быть сведена к задаче наискорейшего приведения упругого элемента в его текущее стационарное состояние, отвечающее действующему в настоящий момент нагружению. Такой подход является продуктивным, особенно в случаях, когда нет никакой априорной информации о характере нагружения f(t).
Аналогично [5, 8], с использованием формализма принципа максимума получим структуру оптимального управления жесткостью нагруженного упругого элемента (1) в виде:

где 
и 
- уравнения линий переключения управления на фазовой плоскости упругого элемента (1), причем линия (4) в явном виде не задана.
Отметим, что на самих линиях переключения (3) и (4) управление (2) может быть доопределено из условий его непрерывности справа (слева). При этом оптимальное управление становится кусочно-постоянной функцией и на каждом интервале постоянства может принимать значения либо V=Vmax, либо V=Vmin
Задача синтеза управления, собственно, и состоит в построении линии (4), применение которой в логике (2) обеспечивает эффективное решение задачи гашения колебаний упругого элемента относительно траектории вынужденного движения.
Трудности, связанные со сложным характером внешнего нагружения, можно обойти за счет использования дельта-метода [9, С.279], согласно которому реальная функция f(t) на последовательности интервалов времени Δi=[ti-1, ti),  аппроксимируется постоянными значениями, например, сi=f(ti-1). В общем случае близость кусочно-постоянной аппроксимации к функции f(t) тем лучше, чем короче интервал Δi.
аппроксимируется постоянными значениями, например, сi=f(ti-1). В общем случае близость кусочно-постоянной аппроксимации к функции f(t) тем лучше, чем короче интервал Δi.
При таком подходе на каждом интервале времени t∈Δi=[ti-1, ti) система уравнений (1) аппроксимируется системой вида:

с начальными условиями

В силу кусочно-постоянного характера управления V стационарным состоянием системы (5) на интервале Δi является точка с координатами  . Существенно, что стационарные точки нагруженной упругой системы (5) при максимальной и минимальной жесткостях не совпадают. Следствием этого, как будет видно в дальнейшем, является возможность осуществления апериодических режимов приведения упругого элемента в стационарные состояния за счет переключения его жесткости.
. Существенно, что стационарные точки нагруженной упругой системы (5) при максимальной и минимальной жесткостях не совпадают. Следствием этого, как будет видно в дальнейшем, является возможность осуществления апериодических режимов приведения упругого элемента в стационарные состояния за счет переключения его жесткости.
Энергия деформаций, запасенная в упругом элементе (5) на интервале Δi, под воздействием нагружения сi составит
и будет минимальна при максимальной жесткости упругой системы. Поэтому с технической точки зрения целесообразно осуществлять перевод упругого элемента (5) в стационарное состояние

а режим максимальной жесткости принять в качестве номинального.
В номинальном режиме полная энергия колебаний упругого элемента (5) относительно стационарного состояния (7) на интервале Δi, определяется из соотношения

В соответствии с развиваемым подходом сформулируем задачу параметрически активного подавления вибраций следующим образом.
Требуется на интервале Δi согласно структуре оптимального управления (2) выбрать такое значение параметра V=V0∈{Vmin, Vmax}, при котором обеспечивается перевод объекта (5) из начального состояния (6) в конечное  удовлетворяющее условию
удовлетворяющее условию

Заметим, что в общем случае динамичного изменения внешнего нагружения q1i(ti)≠q1, i+1(ti)=q1(ti), q2i(ti)≠q2, i+1(ti)=q2(ti), Ei(ti)≠Ei+1(ti)=E(ti), поэтому в конце (начале) каждого интервала аппроксимации возможны скачки параметров, обусловленные отклонением математической модели (5) процесса от реальной динамики упругого элемента (1). С учетом (8) в координатном базисе

соотношение (9) эквивалентно требованию минимизации расстояния до точки {0,0}.
Если в координатном базисе (10) дополнительно ввести масштабирование времени, полагая

то с использованием (10), (11) уравнения (5) преобразуются к виду:
при V=Vmax

при V=Vmin

где x=Vmin/Vmax∈(0,1) - параметр глубины управления; 
Соответственно начальные условия (6) трансформируются следующим образом:

Анализ фазовых траекторий упругой системы. Уравнения (12) описывают свободные колебания одиночного осциллятора с единичной угловой скоростью относительно начала координат и имеют решения


где Aimax, ϕmax - постоянные начальные амплитуда и фаза колебания соответственно. Последнее соотношение является уравнением фазовой траектории упругого элемента в координатах (10) при максимальной жесткости и определяет дугу окружности с центром в начале координат и радиусом Аimax.
Уравнения (13) путем замены переменной  приводятся к системе уравнений
приводятся к системе уравнений

которая, аналогично (12), в координатном базисе (10) описывает свободные колебания одиночного осциллятора, однако, с угловой скоростью  относительно центра с координатами
относительно центра с координатами

и имеет решение

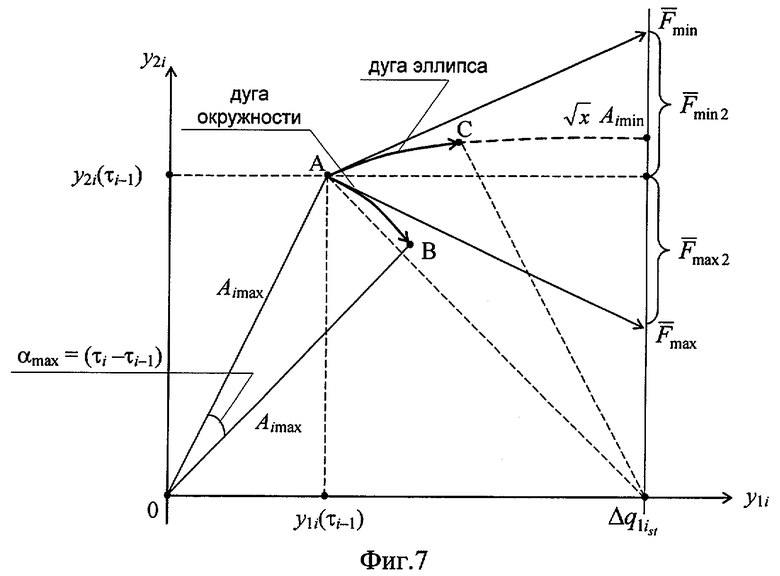
где Aimin, ϕmin - постоянные начальные амплитуда и фаза колебания соответственно. Из последнего соотношения следует, что фазовая траектория упругого элемента при минимальной жесткости в координатах (10) есть соответствующая дуга эллипса, полученного путем сжатия окружности с центром в точке (16) и радиусом Aimin относительно оси ординат с коэффициентом .
Движение по всем траекториям относительно их центров осуществляется по часовой стрелке.
На фиг.7 показаны траектории упругого элемента на интервале Δi, при максимальной (дуга АВ) и минимальной (дуга АС) жесткостях при тождественных начальных условиях. Без ограничения общности здесь принято, что сi>0.
Вектор фазовой скорости  - касательный к фазовой траектории в начальный момент времени τi-1. Согласно (12) и (13) при максимальной жесткости
- касательный к фазовой траектории в начальный момент времени τi-1. Согласно (12) и (13) при максимальной жесткости

а при минимальной жесткости

Синтез управления жесткостью. Поскольку критерием выбора значения управляющего параметра V на интервале управления [τi-1, τi) является минимизация расстояния до начала координат в момент времени τi, и при достаточно малой длительности Δτ=τi-τi-1 интервала управления приращение вектора координат  , то основу синтеза управления может составить сравнительный анализ соответствующих компонент векторов
, то основу синтеза управления может составить сравнительный анализ соответствующих компонент векторов  и
и  в каждой точке фазовой плоскости (у1,у2).
в каждой точке фазовой плоскости (у1,у2).
Согласно соотношениям (17) и (18), первые компоненты векторов и тождественны, поэтому достаточно сравнивать лишь их вторые компоненты.
Так, например, в ситуации, представленной на фиг.7,


Следовательно, движение из точки А с максимальной жесткостью приводит к уменьшению компоненты y2 (дуга АВ) а движение с минимальной жесткостью - напротив, к ее увеличению (дуга АС). Поэтому движение с максимальной жесткостью в данном случае предпочтительней. Ясно, что полученный результат справедлив для любой точки фазовой плоскости, лежащей в области  ограниченной прямыми, на которых компоненты векторов и обращаются в нуль (см. (17), (18)).
ограниченной прямыми, на которых компоненты векторов и обращаются в нуль (см. (17), (18)).
Аналогичным образом проводится анализ компонент  и
и  в других областях фазовой плоскости, обобщенные результаты которого приведены в табл.1. При этом в рассмотрение введена еще одна граница - прямая
в других областях фазовой плоскости, обобщенные результаты которого приведены в табл.1. При этом в рассмотрение введена еще одна граница - прямая  , - которая определена из условия
, - которая определена из условия  . Учтен также знак внешнего нагружения: сi>0.
. Учтен также знак внешнего нагружения: сi>0.
Заметим, что на границах рассмотренных областей фазовой плоскости значение управления V может быть выбрано из условия его непрерывности справа (слева).
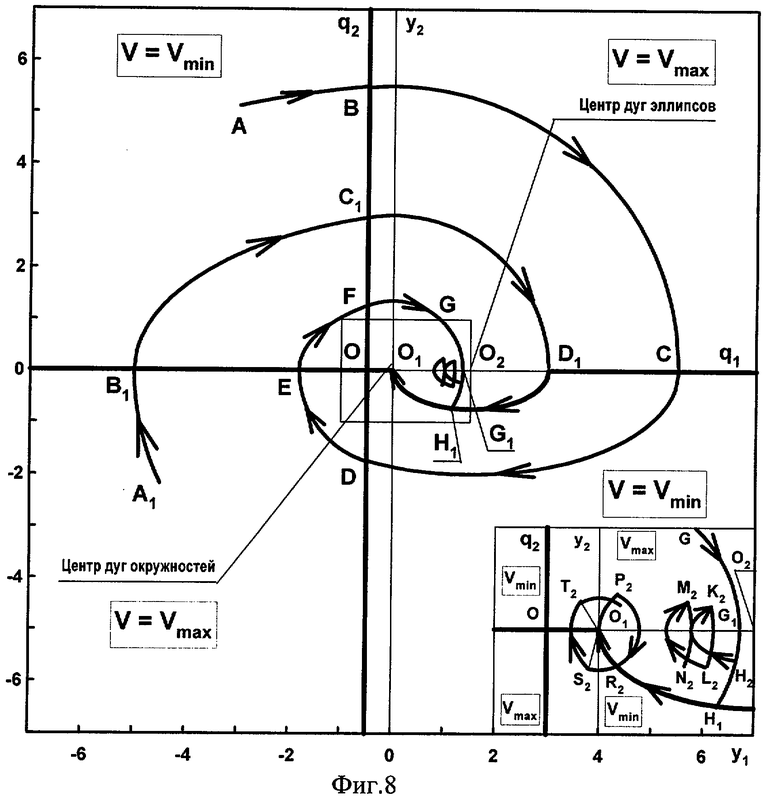
На фиг.8 изображена фазовая траектория ABCDEFGG1 упругого элемента при условии, что Сi=С=const>0, в случае реализации логики управления жесткостью, согласно табл.1. В компактном виде эта логика с точностью до множества нулевой меры (значений управления на линиях переключения) может быть представлена, например, следующим образом:

Из фиг.8 можно сделать вывод о том, что фазовая траектория ABCDFGG1 упругого элемента "скручивается" к началу координат. Однако с учетом инерционности исполнительного органа последующее переключение управления в точке Н2 согласно логике (19) на минимальную жесткость обеспечивает движение упругого элемента по эллиптической траектории в точку К2, где осуществляется переход на максимальную жесткость и начинается движение по дуге окружности K2L2, затем снова движение по дуге эллипса L2М2, дуге окружности M2N2 и т.д. Таким образом, движение упругого элемента после точки G1 переходит в скользящий режим с частыми переключениями управления в окрестности оси O1y1, что нежелательно по следующим причинам:
1) существенно снижается эффект от управления;
2) значительно возрастает нагрузка на исполнительные органы системы управления жесткостью;
3) возможно возбуждение высокочастотных колебаний распределенного упругого элемента.
Однако можно избежать скользящего режима, если "подправить" логику (19) за счет использования "попадающей" траектории (дуга D1O1, фиг.8), приходящей точно в начало координат и имеющей аналитическое выражение (при сi>0):

где  . Яркой иллюстрацией здесь служит, например, траектория A1B1C1D1O1 (фиг.8).
. Яркой иллюстрацией здесь служит, например, траектория A1B1C1D1O1 (фиг.8).
Применительно к ранее рассматриваемой траектории после точки G1 движение должно продолжаться с максимальной жесткостью по дуге окружности G1H1 до пересечения с линией (20). Переключение в точке Hi на минимальную жесткость обеспечит апериодическое приведение упругого элемента по дуге H1O1 в начало координат. Существенно, что согласно построенной логике управления жесткостью, в точке O1 обеспечивается техническая устойчивость положения упругого элемента (см. фиг.8).
Таким образом, объединяя логику (19) и соотношение (20), представим синтезированную логику управления для случая сi>0 в виде:

Вариант, когда Сi=С=const<0 может быть получен из логики (21) путем ее центрального симметричного отображения относительно начала координат.
В аналитической форме эта логика может быть представлена следующим образом:

Объединяя (21) и (22) с учетом (7), (10), (13) и (20), получим общий вид логики управления в координатном базисе (q1, q2):

где  .
.
Отметим, что при f=0 логика (23) тождественна логике (1) при  .
.
Предлагаемое устройство функционирует следующим образом. После воздействия внешнего нагружения, обусловленного движением основания 1, упругий элемент 2 начинает колебаться с максимальной частотой, поскольку в состоянии покоя жесткость упругого элемента 2 максимальна (из условия снижения амплитуды колебаний, возникающих от действия внешнего нагружения). Датчик 4 отклонения начинает выдавать текущее значение обобщенной координаты q2 отклонения упругого элемента 2, которое поступает на вход дифференцирующего блока 5, первый вход блока 7 формирования функции переключения и четвертый вход блока 8 формирования управления жесткостью (фиг.3). Текущее значение обобщенной скорости q2 упругого элемента 2 выдается с выхода дифференцирующего блока 5 на второй вход блока 8 формирования управления жесткостью и на шестой вход блока 7 формирования функции переключения.
Информация об ускорении подвижного основания 1 снимается акселерометром 6 и поступает на второй вход блока 7 формирования функции переключения, а затем - на первый вход блока 9 расчета внешнего нагружения и стационарных положений (фиг.3, 4). В блоке 11 умножения формируется текущее значение внешнего нагружения  , которое поступает на первый и второй делители 12 и 13, а также на третий вход блока 8 формирования управления. В первом делителе 12 рассчитывается
, которое поступает на первый и второй делители 12 и 13, а также на третий вход блока 8 формирования управления. В первом делителе 12 рассчитывается  , во втором делителе 13 -
, во втором делителе 13 -  , а в сумматоре 16 вычисляется
, а в сумматоре 16 вычисляется  (фиг.4). Величины
(фиг.4). Величины  и
и  с первого и второго выходов блока 9 расчета внешнего нагружения и стационарных положений поступают на первый и второй входы блока 10 расчета линии переключения (фиг.3, 5), где в первом сумматоре 17 формируется
с первого и второго выходов блока 9 расчета внешнего нагружения и стационарных положений поступают на первый и второй входы блока 10 расчета линии переключения (фиг.3, 5), где в первом сумматоре 17 формируется  в первом квадраторе
в первом квадраторе  поступающее на первый вход второго сумматора 18; в блоке 19 умножения рассчитывается
поступающее на первый вход второго сумматора 18; в блоке 19 умножения рассчитывается  которое поступает на второй вход второго сумматора 18; в делителе 20 формируется
которое поступает на второй вход второго сумматора 18; в делителе 20 формируется  пройдя через второй квадратор 22, этот сигнал поступает на третий вход второго сумматора 18. В результате на выходе блока 10 расчета линии переключения согласно (23), формируется сигнал Г, который поступает на первый вход блока 8 формирования управления.
пройдя через второй квадратор 22, этот сигнал поступает на третий вход второго сумматора 18. В результате на выходе блока 10 расчета линии переключения согласно (23), формируется сигнал Г, который поступает на первый вход блока 8 формирования управления.
В блоке 8 формирования управления (фиг.6) входные сигналы, пройдя через первый-четвертый релейные элементы 24-27, преобразуются в sgn Г, sgn q2, sgn f, sgn q1 соответственно. В первой схеме 28 сравнения знаков осуществляется проверка условия sgn Г=-1, причем постоянный сигнал - 1 поступает на второй вход этой схемы с источника 23 постоянного напряжения. Во второй схеме 29 сравнения знаков проверяется условие sgn q2=sgn q1, а в третьей схеме 30 сравнения знаков - условие sgn q2=-sgn f. Логические элементы И 31 и ИЛИ 32 реализуют логику управления (23), выдавая на выходе блока 8 формирования управления сигнал, равный логической единице, если необходимо установить V=Vmax и логическому нулю, если V=Vmin.
В остальном функционирование предлагаемого устройства аналогично известному.
Положительный эффект - сокращение длительности переходных процессов в предлагаемом устройстве достигается за счет осуществления перевода упругого элемента в стационарное состояние, отвечающее минимальному коэффициенту динамичности, по "попадающей" траектории.
Таким образом, отличительные признаки предлагаемого устройства способствуют достижению поставленной цели.
Источники информации
1. А.С. СССР №1596306, G 05 В 13/00, 1989 (прототип).
2. А.С. СССР №1129585, G 05 В 11/01, 1983.
3.Шиманский А.Ю. Динамический расчет судовых конструкций. - Л.: Судпромгиз, 1963. - 444 с.
4. Ликинз П. Уравнение в квазикоординатах для космических аппаратов нежесткой конструкции // Ракетная техника и космонавтика. 1975. Т.13, №4. С.137-140.
5. Шалымов С.В. Гашение колебаний упругой системы за счет оптимального управления жесткостью. Часть 1. Постановка задачи, структура управления, инвариант оптимального процесса гашения колебаний // Изв. вузов. Приборостроение. 1998. Т.41, №6. С.36-40.
6. Шалымов С.В. Гашение колебаний упругой системы за счет оптимального управления жесткостью. Часть 2. Уравнения линий переключения управления // Изв. вузов. Приборостроение. 1999. Т.42, №3-4. С.46-50.
7. Шалымов С.В. Гашение колебаний упругой системы за счет оптимального управления жесткостью. Часть 3. Построение оптимальных линий переключения жесткости // Изв. вузов. Приборостроение. 1999. Т.42, №7. С.39-47.
8. Шалымов С.В. Оптимальное гашение колебаний простых упругих систем с управляемой жесткостью - СПб.: МО РФ, 2001. - 101 с.
9. Вибрации в технике. Справочник в шести томах. Т.6. Защита от вибрации и ударов / Под ред. К.В.Фролова. - М.: Машиностроение, 1995. - 456 с.
Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов в условиях внешнего нагружения. Устройство содержит подвижное основание с присоединенным к нему упругим элементом. К выходу упругого элемента подключен датчик отклонений упругого элемента, а ко входу - регулятор жесткости упругого элемента. Выход датчика отклонений упругого элемента соединен с входом дифференцирующего блока и первым входом блока формирования функции переключения. Выход подвижного основания подключен к входу акселерометра, выход которого связан со вторым входом блока формирования функции переключения, первый выход которого соединен с первым входом блока формирования управления. Выход дифференцирующего блока подключен ко второму входу блока формирования управления, выход которого связан с входом регулятора жесткости упругого элемента. Устройство снабжено первым, вторым и третьим источниками постоянного напряжения, выходы которых подключены соответственно к третьему, четвертому и пятому входам блока формирования функции переключения, шестой вход которого соединен с выходом дифференцирующего блока, а второй выход - с третьим входом блока формирования управления. Четвертый вход блока формирования управления связан с выходом датчика отклонений упругого элемента. Технический результат изобретения заключается в повышении быстродействия устройства. 4 з.п. ф-лы, 8 ил. 1 табл.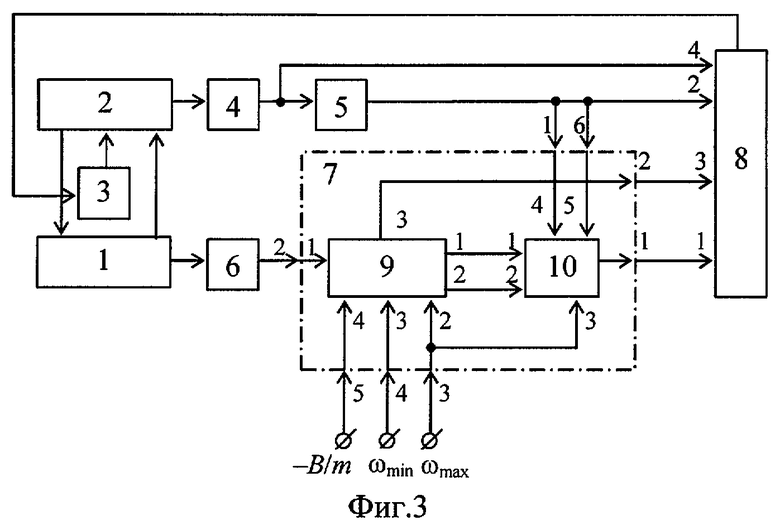
| Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости | 1989 |
|
SU1596306A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192036C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2241251C1 |
| US 4207957 A, 17.06.1980 | |||
| US 4633982 A, 06.01.1980. | |||

