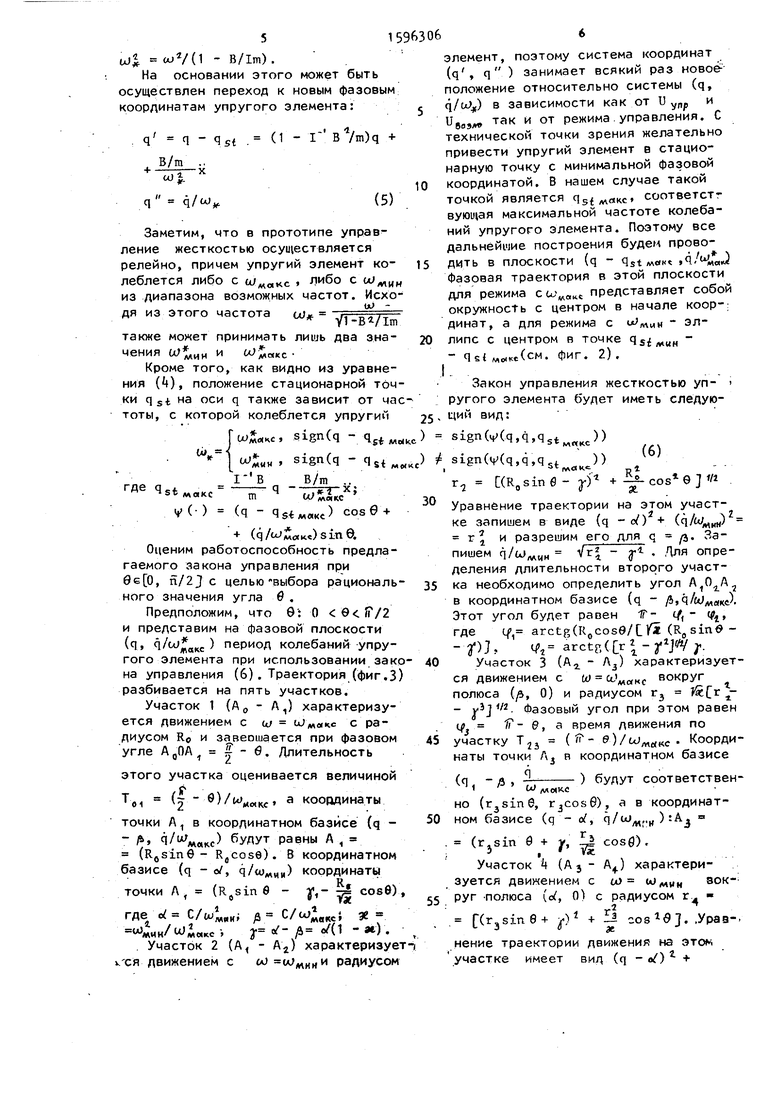
Изобретение относится кустройст вам управления упругими динамическими объектами, а именно активного демпфирования колебаний упругих эле ментов при наличии возмущающих воздействий. Цель изобретения - сокращение длительности переходных процессов при демпфировании колебаний упругого .элемента большой амплитуды. На фиг. 1 представлена функциональная схема адаптивного устройст ва для гашения колебаний упругого элемента переменной жесткости, на фиг о 2 и 3 - траектории колебаний упругого элемента. Устройство содержит объект управ ления 1 с присоединенным упругим элементом 2, датчик 3 отклонения, дифференциатор Ц, исполнительный орган 5 управления жесткостью, блок 6 формирования управления жесткость блок 7 формирования функции переклю чения, акселерометр 8. Блок 7.формирования функции переключения содержит два делителя напряжения 9, 10 и сумматор 11. Блок 6 формирования управления жесткостью содержит два релейных элемента 13, 1, схему 12 сравнения знаков. (ССЗ) и сумматор 15. Динамика упругого элемента на подвижном основании может быть пред ставлена в виде 1х + Bq М ,np + Мввзлл 1 В .. q -W q - - X , где X - фазовая координата подвижно го (вращающегося) основания I - момент инерцииJ пр Мри - управляющий и возмущающий моментЫ} В - коэффициент взаимовлияния основания и упругого элемен та; q - обобщенная координата колебаний упругого элементаj mjwJ- масса и собственная частота колебаний упругого элемента Уравнение колебаний упругого эле мента записано для случая отсутстви собственного демпфирования. Из системы (1) путем взаимной подстановки уравнений q- -U/q - -(- I q - и пр после несложных преобразований запишем 1 - В Vim . 1 - В Vim Р U6o,M. (2) и 1 - BVira . -1 - BVim ивозм). (3) хЗаметим, что влияние подвижного основания на движение упругого элемента сводится в тому, что изменяется частота колебаний последнего и имеет место возмущающее воздействие С (jc)qg, которое линейно зависит от Uvjnp + всэ/л Аппроксимируя С const на каждом интервале управления, из уравнения (3) для qCt,) q) q(to) Чо нетрудно получить решение q Acos(tLi,.t 4- i/) + C/uj|. ; q -Au)| s in (( ), где;А (q - C/u.)2 ql UV W/ с 1 - BVlmj , c/ I sign(q)sin(q, )- 1 - .. - arctg qj/u;((q, - ,)) начальные условия. Задача гашения свободных колебаий упругого элемента при отсутствии возмущений решена. Поэтому в данном случае все дело водится к прогнозированию стациоарной точки q St по информации о вижении подвижного основания и уп- угого элемента: полученной из формулы (2) под ста нов-) кой формулы (3) с учетом q О, где uJ cuVd - B/Im). Ha основании этого может быть осуществлен переход к новым фазовым координатам упругого элемента: (1 - I В /m)q + q п - qst q q/u), Заметим, что в прототипе управление жесткостью осуществляется релейно, причем упругий элемент колеблется либо с Либо с u)( из диапазона возможных частот. Исхо дя из этого частота ц} yi-BVIm также может принимать лишь два значения и , Кроме того, как видно из уравнения (k), положение стационарной точ ки q g на оси q также зависит от ча тоты, с которой колеблется упругий ГсиД«кс, signCq - м«н . signCq - fl,. B/m 5с.. где i«. V(-) (q - qsi««Ke) cose + + (q/uJ;Jo(K«)sine. Оценим работоспособность предлагаемого закона управления при , fi/2j с целью выбора рациональ ного значения угла б. Предположим, что в: О и представим на фазовой плоскости (q, . ) период колебаний упругого элемента при использовании зак на управления (6) . Траектория (фиг.3 разбивается на пять участков. Участок 1 (АО - Л,) характеризуется движением с w с радиусом RO и за веошается при фазовом - б. Длительность угле А jOA ЭТОГО участка оценивается величиной 2 . а координаты точки А, в координатном базисе (q - А q/i MctKC будут равны А , ( - RjCose). В координатном базисе (q - «S/, q/w,uu) координаты R. точки А ( в - у,- cos6) где с C/wJ,,; ;3 ge MMH/UJ C,KC i 3- oi-- ;5 e/(1 - ж) . Участок 2 (A - Aj,) характеризуе х.ся движением с радиусом 1 М лемент, поэтому система координат (q q) занимает всякий раз новоеоложение относительно системы (q, q/u) в зависимости как от U „ и UBOSA ° режима, управления. С технической точки зрения желательно привести упругий элемент в стационарную точку с минимальной фазовой координатой. В нашем случае такой точкой является соответстг вующая максимальной частоте колебаний упругого элемента. Поэтому все дальнейшие построения будем проводить в плоскости (q - qjt «««« .А/Чча Фазовая траектория в этой плоскости для режима представляет собой окружность с центром в начале коор-; динат, а для режима с ьлмии - эллипс с центром в точке - qs{ „„.ксСсм. фиг. 2) . Закон управления жесткостью упругого элемента будет иметь следующий вид: sig(,q,qst««Kc stgn(v(q,q,q C(R,sin0- 3-) + Уравнение траектории на этом участке запишем в виде (q - с) + ( Tj и разрешим его для q . Запишем (l/u)н Vr| - j-i . Для определения длительности второго участка необходимо определить угол ,.j в координатном базисе (q - /b,4/u}f eiK.t). Этот угол будет равен 1Г- t/t Vj, где 1, arctgCR cosQ/L/ (RflSine-/), , arctaCCrl-y joV/. Участок 3 (А,. - А) характеризуется движением с W ( вокруг полюса (/5, 0) и радиусом tj - Фазовый угол при этом равен ( - 8, а время движения по участку Т,, ( 0)/ы Координаты точки Ад в координатном базисе (q. /в, т) будут соответствен W /««КС но (rising, ), а в координатном базисе (q - 0, q/oJ,,, ) :А, jr, COS0). (г.sin 0 + I Участок k (А 3 - А) характеризуется движением с о) Шмии вокруг -полюса (о, 0) с радиусом 2 . (Гз81пе+ -f} + . .Ураа-нение траектории движения на этоь участке имеет вид (q - в) + ( ) t-. Отсюда при q о можно найти коорлинаты точки А « (of, TrJ в координатном базисе (q , 4/4Чийн угол в рассматриваемом координатном ба:зисе будет определяться выражением (f, arctg r -/Vy. Однако фазовый угол этой траектории равен 4 arctgCfr -; / / - arctg 8,. Тогда длительность эт го участка может быть оценена выражением . Уг.-г., (arctg-TJ:) - arctggr, ГзСОВб Т«(гзз1пв+о) Участок 5(А4- Лу) характеризуется движением с w . вокруг полюса (р, 0) с радиусом гу- - У в течение времени Т4 - J/Zw,}. Таким образом, за период 4Т-, + Т 34 + + Т,, + Т 2(1Г- е) (arctg е«,+ W,MM t макс ЛЛО rsv----- + arctg i) « arctgCy г - у/ ) - arctgCYTI (7) устройством обеспечивается гашение амплитуды на RO -iZ Для более детального анализа пре имуществ предлагаемого устройства перед противопоставляемым необходи мо проведение расчетов 4К(,) , (в, л RO) соответственно по формулам (8) и (7) для ОвСо,|J, 2 j at€CO,1 и ,2e/. Сопоставлени Предлагаемого устройства с противо поставляемым целесообразно -вести п коэффициенту демпфирования 3(0, жj Rj), вычисляемому по формуле в 1 ( InRT-), где Т - мерный интервал времени. например средний перибд ко лебаний} R,,R - начальная и конечная ампли туда колеба НИИ, Логика управления (6) реализуется с помощью устройства, представленного на фиг. 1, которое функционирует следующим образом. Акселерометром 8 снимается информация о текущем состоянии подвижного основания (х ). Си1- нал с выхода акселерометра 8 проходит через первый делитель напряжения блока 7 с коэффициентом передачи В/т и поступает на первый вход сумматора 11. Информация о фазовом положении q упругого элемента 2 снимается с датчика 3 углового отклонения, через дифференцирующий блок Л, поступает на вход сумматора 15 блока.6, а также проходит через второй делитель напряжения с коэффициентом передачи и подается на второй вход сумматора 11 блока 7. На выходе сумматора 11 формируется сигнал q-q м«к: поступающий на второй вход блока 6 (второй вход сумматора 15 и на вход второго релейного элемента 14), В остальном предлагаемое устройство функционирует аналогично прототипу. Как указывалось, реализация логики (6) позволяет сократить длительность переходных процессов перевода упругого элемента в окрестность (/J ± J) стационарных состояний и за счет этого уменьшить вероятность возникновейия усталостных явлений в упругой конструкции из-за многократного превышения предельно допусТ1 -(ых отклонений ее от положения равновесия. Формула изобретени-я 1.Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости, содержащее исполнительный орган управления жескостью, выход которого соединен с входом упругого элемента объекта управления, связанного с объектом управления датчик отклонения, вход которого соединен с упругим элемен- том переменной жесткости, а выход подключен к ВХОДУ дифференциатора и«первому входу блока формирования управления жесткостью, выход которой го соединен с входом исполнительного органа управления жесткостью. отличающееся тем, что, с целью сокращения длительности пере ходных процессов при демпфировании колебаний упругого элемента большой амплитуды, оно дополнительно снабжено акселерометром и блоком формирования функции переключения, причем вход акселерометра подключен к выходу объекта управления, а выход - к первому входу блока формирования функции переключения, второй вход котор го соединен с выходом датчика отклонения, выход блока формирования функции переключения соединен с вто15,0 рым входом блока формирования управ ления жесткостью. 2. Устройство по п. 1, о т л и чающееся тем, что блок формирования функции переключения содержит первый и второй делители и сумматор, причем первый и второй входы блока формирования функции переключения соединены с входами соответственно первого и второго делителей, выходы которых подключены к входам сумматора, выход сумматора связан с выходом блока формирования фу нкции переключения.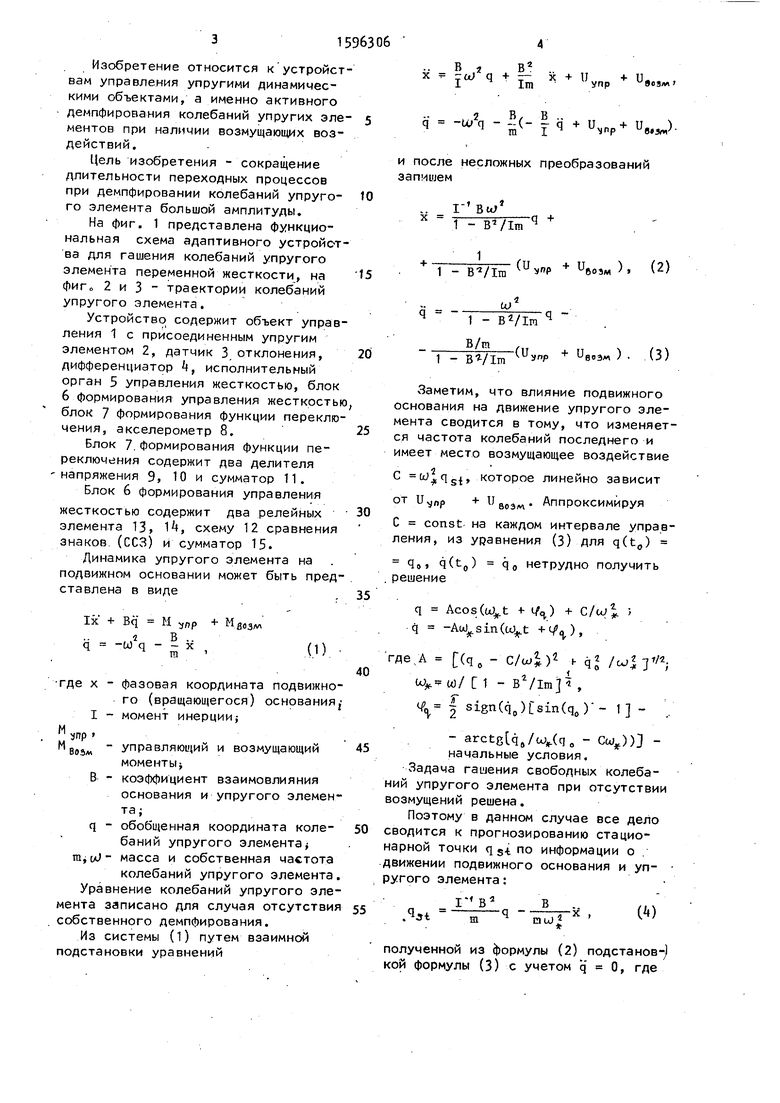
Изобретение относится к устройствам управления упругими динамическими объектами, а именно активного демпфирования колебаний упругих элементов при наличии возмущающих воздействий. Целью изобретения является сокращение длительности переходных процессов при демпфирования колебаний упругого элемента большой амплитуды. Адаптивное устройство содержит объект управления 1 с присоединенным упругим элементом 2, датчик отклонения 3, дифференциатор 4, исполнительный орган управления жесткостью 5, блок формирования управления жесткостью 6, блок формирования функции переключения 7, акселерометр 8. 1 з.п.ф., 3 ил.
LI СО макс
////А
/,
Фие. Z /////. СО СОглнН
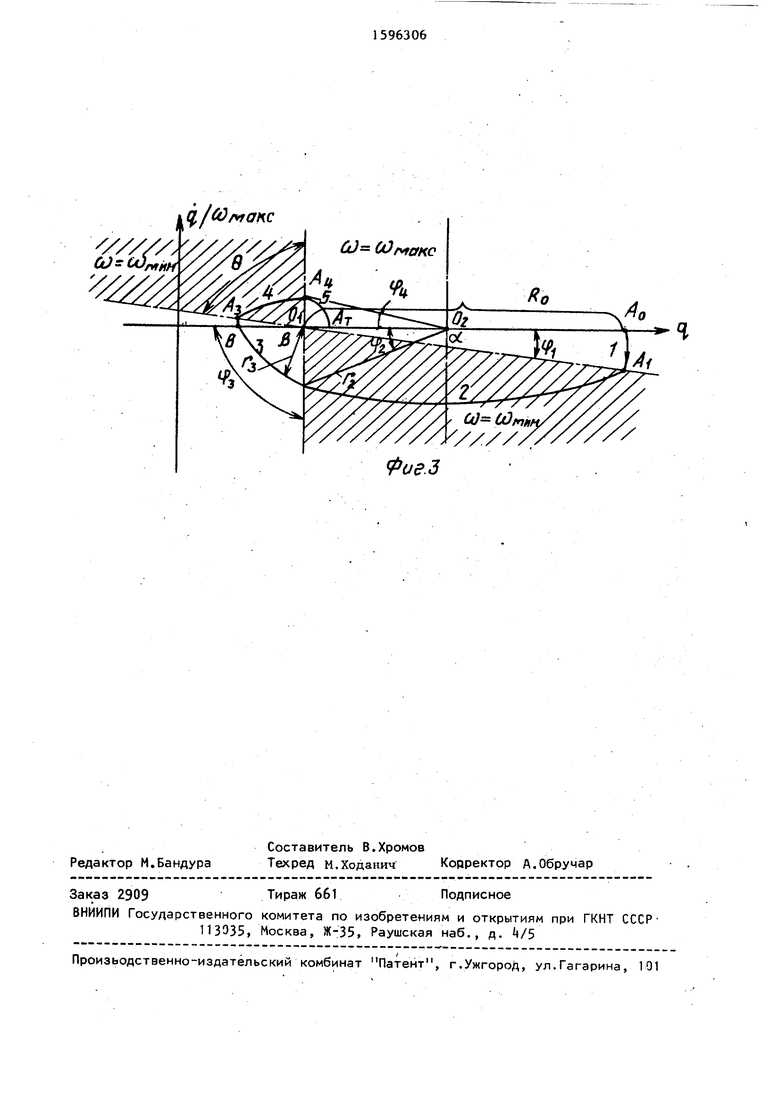
ФиеЗ
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1983 |
|
SU1129585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
