Изобретение относится к транспортному машиностроению, в частности к устройствам для автоматического управления тормозами сельскохозяйственных тракторов с передним и задним ведущими мостами.
Цель изобретения - повышение эффективности.
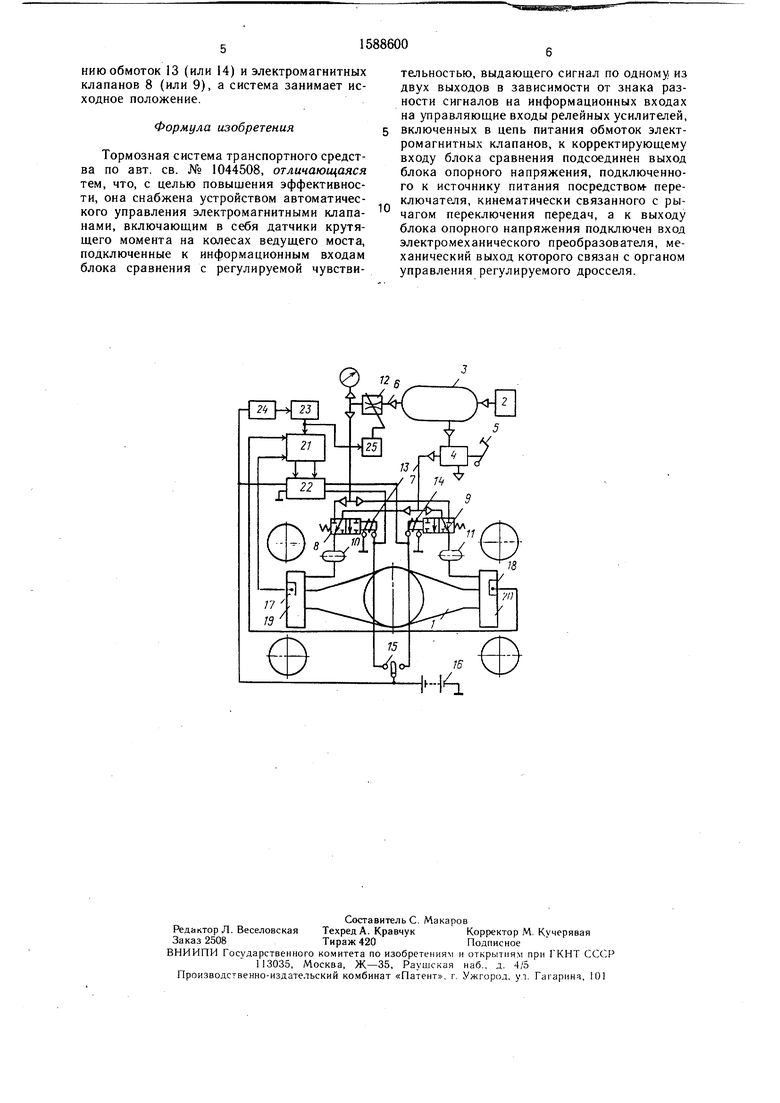
На чертеже представлена электропневматическая принципиальная схема тормозной системы транспартного средства.
Тормозная система транспортного средства с одним или несколькими ведущими мостами 1 содержит компрессор 2, ресивер 3, тормозной кран 4 управления с педалью 5, магистрали 6 и 7 питания, соединяющие соответственно ресивер 3 и тормозной кран 4 с электромагнитными клапанами 8 и 9, которые последовательно соединены с пневмокамерами 10 и 11. В магистрали 6 питания установлен регулируемый дроссель 12, позволяющий регулировать давление в магистрали от О до 6-7,65 кгс/см;-. Обмотки 13 и 14 электромагнитных клапанов 8 и 9 электрической связью попарно по ведуи 1,им мостам 1 соединены с трех- позиционными тумблерами 15 для соединения с источником 16 питания при ручном управлении работой пневмокамер. Датчики крутящего момента 17 и 18 установлены соответственно на левом 19 и правом 20 колесах каждого из ведущих мостов 1 и подключены к информационным входам блока 21 сравнения с регулируемой чувствительностью, который своими двумя выводами связан с управляющими входами релейных усилителей 22, включенных в цепь питания обмоток 13 и 14 электромагнитных клапанов 8 и 9. К корректирующему входу блосд
00 00 О5
К)
ка 21 сравнения подсоединен выход блока 23 опорного напряжения, подсоединенного к источнику 16 питания посредством переключателя 24, кинематически связанного с рычагом переключения передач. К выходу блока 23 опорного напряжения подключен вход электромеханического преобразователя. 25, механический выход которого связан с органами управления регулируемого дросселя 12.
При тяжелых дорожных условиях, когда сцепление ведущих колес с грунтом различно и одно из ведущих колес ведущего моста начинает пробуксовывать, крутящий с момент резко уменьщается. Это уменьшение фиксируется датчиком 17 или 18 крутящего момента. Рассогласующий сигнал от этих датчиков поступает на информационный вход блока 21 сравнения. На корректирующий вход блока 21 сравнения поступает
Тормозная система транспортного средст- Ю эталонный сигнал крутящего момента, вели- ва с ведущими мостами работает следую-чина которого зависит от включаемой пещим образом.редачи. Этот сигнал поступает от выхода блоВ зависимости от вида работы транс-ка 23 опорного напряжения, подключеннопортного средства и дорожных условий пред-го к источнику 16 питания посредством
лагаемая система управления тормозами мо- ig переключателя 24, который имеет столько жет работать в нескольких режимах: тор-положений, сколько передач в трансмиссии
можения всех колес одновременно, ручное транспортного средства. При каждом таком управление подтормаживанием колеса или од- переключении в блоке 23 опорного напря- ного из бортов, автоматическое управле-жения включается соответствующая нагрузние тормозами.ка, чтобы на его выходе был сигнал, проДля торможения всех колес одновремен- 20 порциональный крутящему моменту на веду- но воздействуют на педаль 5. При этомщих колесах на соответствующей передарукоятк и тумблеров 15 находятся в нейтраль-че. Это объясняется тем, что крутящий моном положении, а электромагнитные клана-мент на различных передачах различен и
ны 8 и 9 соединяют магистраль 7 от тор-существенно отличается, поэтому сигналы
мозного крана 4 с пневмокамерами 10 и 11. с рассогласования от датчика 17 или 18 крутя- При нажатии на педаль 5 происходит от-щих мо.ч ентов на различных передачах
также существенно отличаются. Устраняется это подачей эталонного сигнала на корректирующий вход блока 21 сравнения для регулирования его чувствительности, т. е. на 30 каждой передаче будет своя величина сигнала. В блоке 21 сравнения сигналы от датчиков 17 или 18 крутящего момента сравниваются между собой. Если какой-то из сигналов будет меньще другого, то рассогласованный сигнал поступает на ссответствуюна 8 или 9. В -результате этого сраба- 35 щий релейный усилитель 22, который замы- тывает соответствующий клапан 13 или 14, кает обмотку 13 или 14 электромагнит- который отсекает питающую магистраль 7 ного клапана 8 (9) того колеса 19 (20),дат- от тормозного крана и подключает питаю- чик 17 (18) крутящего момен-а которого щую магистраль 6 от ресивера к пневмо- подает меньщую величину сигнала, что при- камере 10 или 11. Происходит включение водит к соединению ресивера 3 с-пневмотормоза только буксующего колеса 19 или 20. камерой 10 (11), и как следствие, происхо- Преодолев препятствие, водитель отпускает дит подтормаживание данного ведущего ко- рукоятку тумблера 15, что обеспечивает при- леса. Величина подтормаживающего момен- ведение тормозной системы в первоначаль-та регулируется также автоматически. Паное положение.раллельно с передачей сигнала от блока 23
Ручное управление подтормаживанием од-45 опорного напряжения на блок 21 сравне- ного из бортов осуществляется с помощью ния с регулируемой чувствительностью он пе- трехпозиционных тумблеров 15. В этом слу- редается и на механический преобразова- чае комбинированная система управления тель 25, механический вывод которого свя- тормозами позволяет (независимо от пе- зан с органом управления регулируемого дального управления тормозами) перейти надросселя 12, регулируя величину давления
ручное управление и выборочно, в зависимое- 50 воздуха от О до его максимального знати от того, в какую сторону произво-чения 6,0-7,5 кгс/см в зависимости от
величины крутящего момента, передаваемого от коробки передач на ведущий мост. Рабочий процесс приостанавливается по мере выравнивания величины крутящего мо- 35 мента на правом и левом колесах 19 и 20 ведущего моста и останавливается, когда на блок 21 сравнения подаются равные по величине сигналы, что приводит к отключекрытие тормозного крана 4 и воздух из ресивера 3, где он находится под давлением б-7,65 кгс/см , поступает в пневмо- камеры 10 и 11. В результате происходит торможение всех ведущих колес.
В случае, когда буксует одно из колес, водитель переводит рукоятку тумблера 15 в соответствующее положение, замыкая электрическую цепь, питающую обмотку 13 или 14 соответствующего электромагнитного клападить поворот, подтормаживать колеса этого борта. При этом происходит перераспределение угловых скоростей колес ведущих мостов в соотнощениях, зависящих от величины подтормаживающего момента.
В автоматическом режиме управления тор мозная система работает следующим образом.
При тяжелых дорожных условиях, когда сцепление ведущих колес с грунтом различно и одно из ведущих колес ведущего моста начинает пробуксовывать, крутящий момент резко уменьщается. Это уменьшение фиксируется датчиком 17 или 18 крутящего момента. Рассогласующий сигнал от этих датчиков поступает на информационный вход блока 21 сравнения. На корректирующий вход блока 21 сравнения поступает
эталонный сигнал крутящего момента, вели- чина которого зависит от включаемой пению обмоток 13 (или 14) и электромагнитных клапанов 8 (или 9), а система занимает исходное положение.
Формула изобретения
Тормозная система транспортного средства по авт. св. № 1044508, отличающаяся тем, что, с целью повышения эффективности, она снабжена устройством автоматического управления электромагнитными клапанами, включающим в себя датчики крутящего момента на колесах ведущего моста, подключенные к информационным входам блока сравнения с регулируемой чувствительностью, выдающего сигнал по одному из двух выходов в зависимости от знака разности сигналов на информационных входах на управляющие входы релейных усилителей, включенных в цепь питания обмоток электромагнитных клапанов, к корректирующему входу блока сравнения подсоединен выход блока опорного напряжения, подключенного к источнику питания посредством- переключателя, кинематически связанного с рычагом переключения передач, а к выходу блока опорного напряжения подключен вход электромеханического преобразователя, механический выход которого связан с органом управления регулируемого дросселя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормозная система транспортного средства | 1980 |
|
SU1044508A1 |
| Ручной привод для избирательного торможения колес транспортного средства | 1980 |
|
SU912571A1 |
| Электропневматический тормозной привод транспортного средства | 1988 |
|
SU1594029A1 |
| Устройство управления механизмами поворота и тормозами шарнирно-сочлененного транспортного средства | 1988 |
|
SU1576409A1 |
| Механизм управления дифференциалом ведущего моста колесной машины | 1987 |
|
SU1523411A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| Комбинированная противоблокировочная и противобуксовочная тормозная система | 1980 |
|
SU1726299A1 |
| Тормоз наката с механизмом стабилизации движения одноосного прицепа | 2023 |
|
RU2820724C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
Изобретение относится к транспортному машиностроению. Цель изобретения - повышение эффективности. Тормозная система снабжена устройством автоматического управления электромагнитными клапанами 8 и 9 повышения и сброса давления в тормозном приводе. Это устройство включает в себя датчики 17 и 18 крутящего момента на колесах 19 и 20 ведущего моста, подключенные к блоку 21 сравнения, выдающему сигнал на одном из двух выходов в зависимости от знака разности сигналов на входах, подаваемый на управляющий вход соответствующего релейного усилителя 22, включенного в цепь питания обмотки соответствующего клапана. Блок 21 имеет корректирующий вход, на который подается опорное напряжение с блока 23, управляемого переключателем 24, кинематически связанным с рычагом переключения передач трансмиссии транспортного средства. К выходу блока 23 подключен вход электромеханического преобразователя 25, механический выход которого связан с органом управления регулируемого дросселя 12, изменяющего давление в питающей магистрали тормозного привода. 1 ил.
| Тормозная система транспортного средства | 1980 |
|
SU1044508A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
