ФигЛ
19
Изобретение относится к области гидро- автоматикн и может быть использовано в следящих системах транспортных средств, манипуляторов и летательных аппаратов.
Целью изобретения является расширение функциональных возможностей и повышение точности.
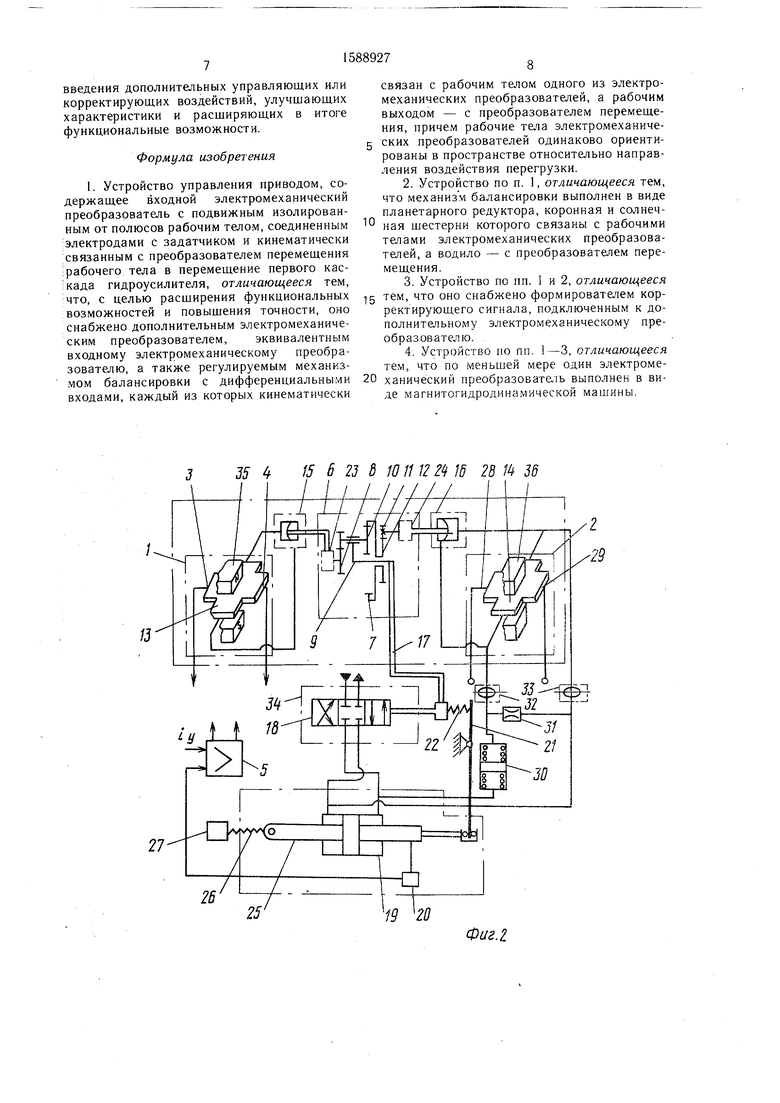
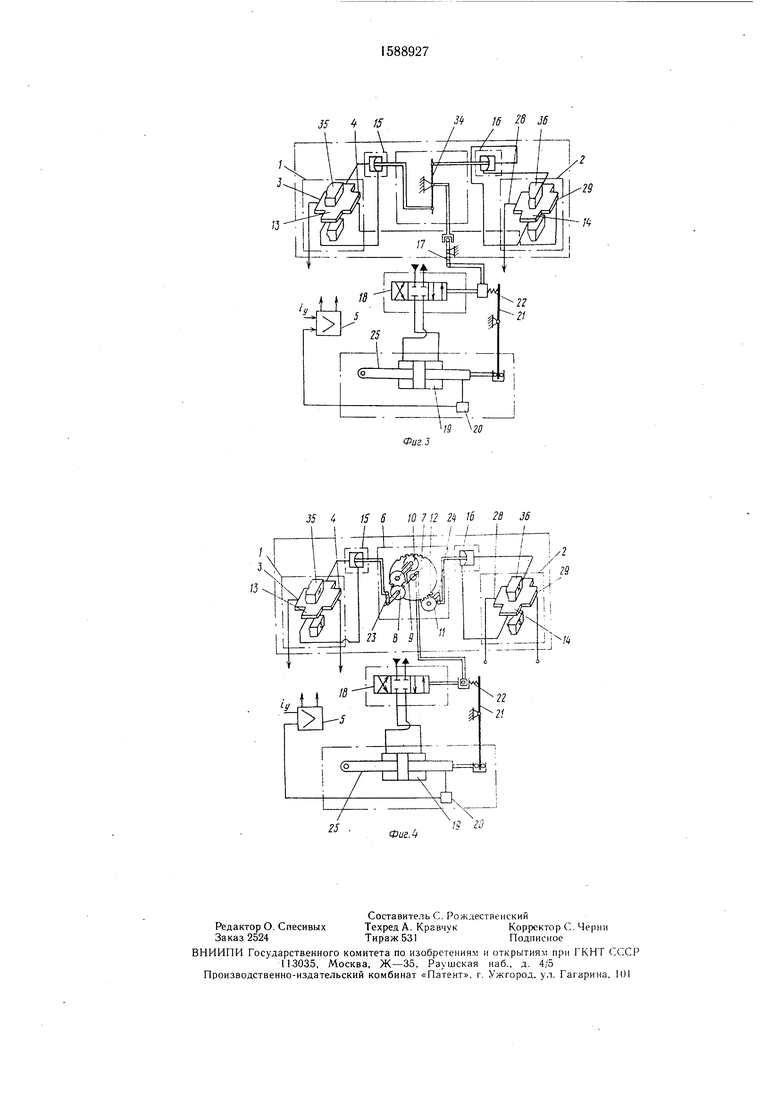
На фиг. 1 изображена схема устройства управления приводом с управлением элект- ;ромеханическими преобразователями парал- :лельными электрическими сигналами; на :фиг. 2 - то же, с комбинированной коррек- цией; на фиг. 3 - то же, с последователь- :ными электрическими сигналами; на фиг. 4- схема фиг. 1 с планетарным редуктором в аксонометрической проекции.
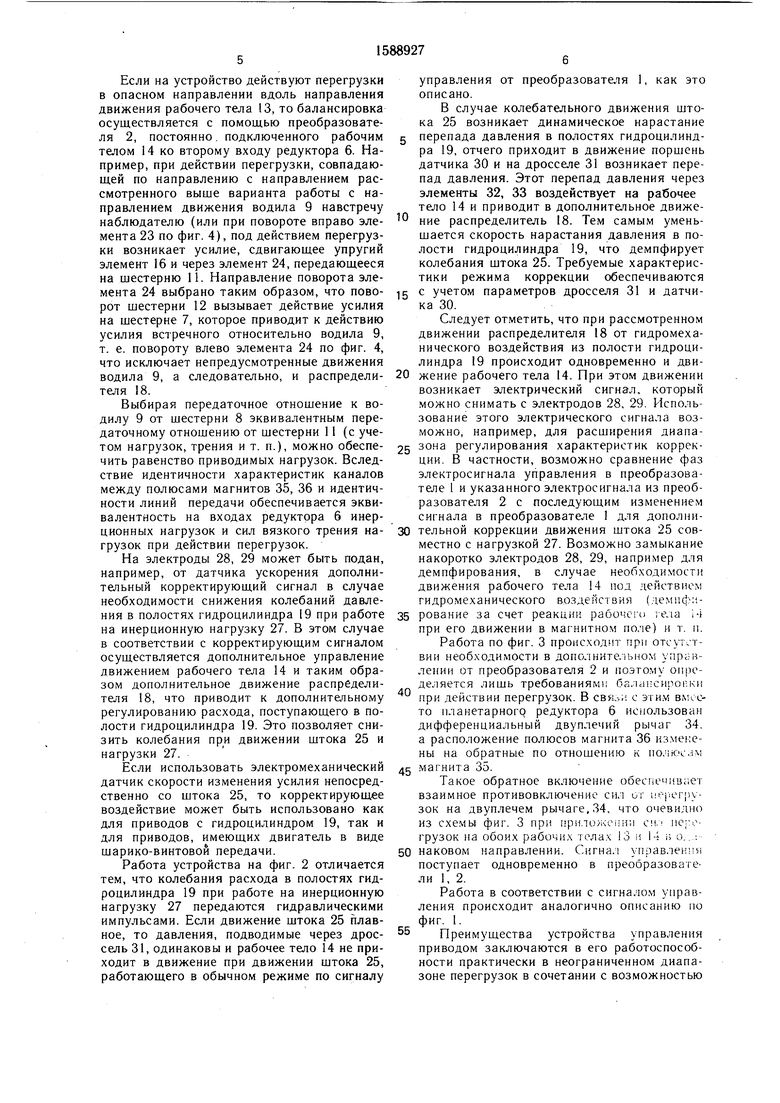
Устройство содержит входной электромеханический преобразователь в виде магни- тоэлектрического преобразователя 1. до- полнитатьный электромеханический преобразователь 2, эквивалентный преобразователю 1, связанному электродами 3, 4 с за- датчиком 5, механизм балансировки в виде планетарного редуктора 6 {фиг. I, 2, 4) с к(.г- ронной шестерней 7, солнечной шестерней 8, водилом 9 и сатаалитом 10 и входными шестернями П, 12. Электропроводные рабочие тела 13, 14 преобразователей i, 2 кинематически связаны упругими элементами 15, 16 с шестернями 8, 11, выполняющими функции дифференциальных входов редуктора 6, и одинаково ориентированы в нростра1 стве относительно направления воздействия перегрузки.
Выход мехаь изма балансировки - водило 9 связан преобразователем перемещения рабочего тела, выполненным в виде рычага 17 с первым каскадом, напри.м ер гидравлическим распределителем 18 гидроусилителя (не обозначен). Распределитель 18 подключен к гидроцилиндру 19, имеющему датчик 20 обратной связи и рычаг 21 обратной связи, связанный с распределителем 18 пружиной 22. Кинематические элементы 23, 24 связи снабжены управляемыми фрикционными муфтами (не обозначены). Гидроцилиндр 19 соединен штоком 25 и пружиной 26 с инерционной нагрузкой 27. Формирователь корректирующего сигнала (не изображен) подключается к электродам 28, 29 преобразователя 2.
На фиг. 2 комбинированная коррекция обеспечивается подключением к рабочему телу 14 преобразователя 2 гидромеханического устройства, включающего датчик 30 динамического перепада давления с подпружиненным поршнем (не обозначен), дроссель 31 и разделительные элементы 32, 33. Датчик 30 и дроссель 31 гидравлически связаны с полостями гидроцилиндра 19.
На фиг. 3 механизм балансировки выполнен в виде дифференциального рычага 34 Рабочие тела 13, 14 изолированы от полюсов магнитов 35, 36 преобразователей 1, 2. За0
датчик 5 выполнен в виде электронного блока сравнения. Преобразователи 1, 2 могут быть выполнены в виде магнитогидродина- мических машин с жидкими рабочими телами 13, 14. Формирователь корректирующего сигнала может быть выполнен с датчиком ускорения или с датчиком скорости изменения усилия штока 25.
Устройство управления приводом (фиг. 1, 4) работает следующим образом.
Сигнал управления, подаваемый из блока 5, проходит от электрода 3 к электроду 4, пересекая магнит11ьге линии полюсов магнита 35. По правилу левой руки возникает электродинамическая сила, приводящая в движение электропроводное рабочее тело 13. В случае использования жидкого рабочего тела 13 оно движется в канале между полюсами магнита 35 и передает движение через упруг.чй эле.мент 15 и элемент 23 па шестерню 8. Дальше движение передается на во- ди;1о 9 и на рычаг- 17, а от него - на распределитель 18.
Согласование требуемых направлений движения в редукторе 6 осуществляется простым Bi i6opoNi .злений движения
5 элементов 23 и 24. Например, при движении элемента 15 впра130 (по чертежу) передача движения через элемент 23 происходит так, что ось сателлита 10 направлена навстречу на наблюдателя от п;1оскости чертежа (или при повороте вправо элемента 23 на фиг. 4),
0 а движение расиределиге.ля 18 происходит при этом влево по чертежу с растяжением пружины 22. , Шток 25 1 идроциликдра 18 выдвигается, преодолезая нагрузку, в том числе инерционную нагрузку 27. При этом рычагом 27 распределнте: Ь 18 возвращается
5 в исходное положение, а с ио.мощью датчика 20 поступает сигнал отрицательной электрической обратной связи в блок 5, где он нейтрализует сигнал управления, после чего в исходное положение приходит и рабочее
Q тело 13.
Шток 25 устанавливается в требуемом положении в условиях колебательности, обусловленной влиянием инерционной нагрузки и межесткостей. При поступлении
5 сигнала в обратном направлении, т. е. от электрода 4 к электроду 3 все движение происходит в обратном направлении, т. е. ось сателлита 10 движется от наблюдате тя пер- пендикулярпо плоскости чертежа (или при повороте влево э;1емен:та 23 по фиг. 4), и рас0 пределите„ть 8 движется вправо по чертежу, сжи.мая пружину 22.
Шток 25 гидроцилиндра i9 и рычаг 21 с пружиной 22 возвращают распределитель 18 в исходное положение. С датчика 20 поступает в блок 5 электрический сигнал
отрицатепьной обратной связи, что приводит . в исходное положение рабочее тело 13 преобразователя 1.
Если на устройство действуют перегрузки в опасном направлении вдоль направления движения рабочего тела 13, то балансировка осуществляется с помощью преобразователя 2, постоянно, подключенного рабочим телом 14 ко второму входу редуктора 6. Например, при действии перегрузки, совпадающей по направлению с направлением рассмотренного выше варианта работы с направлением движения водила 9 навстречу наблюдателю (или при повороте вправо элемента 23 по фиг. 4), под действием перегрузки возникает усилие, сдвигающее упругий элемент 16 и через элемент 24, передающееся на шестерню 11. Направление поворота элемента 24 выбрано таким образом, что поворот шестерни 12 вызывает действие усилия на шестерне 7, которое приводит к действию усилия встречного относительно водила 9, т. е. повороту влево элемента 24 по фиг. 4, что исключает непредусмотренные движения водила 9, а следовательно, и распределителя 18.
Выбирая передаточное отношение к во- дилу 9 от шестерни 8 эквивалентным передаточному отношению от шестерни 11 (с учетом нагрузок, трения и т. п.), можно обеспечить равенство приводимых нагрузок. Вследствие идентичности характеристик каналов между полюсами магнитов 35, 36 и идентичности линий передачи обеспечивается эквивалентность на входах редуктора 6 инерционных нагрузок и сил вязкого трения нагрузок при действии перегрузок.
На электроды 28, 29 может быть подан, например, от датчика ускорения дополнительный корректирующий сигнал в случае необходимости снижения колебаний давления в полостях гидроцилиндра 19 при работе на инерционную нагрузку 27. В этом случае в соответствии с корректирующим сигналом осуществляется дополнитатьное управление движением рабочего тела 14 и таким образом дополнительное движение распредели- теля 18, что приводит к дополнительному регулированию расхода, поступающего в полости гидроцилиндра 19. Это позволяет снизить колебания при движении штока 25 и нагрузки 27.
Если использовать электромеханический датчик скорости изменения усилия непосредственно со штока 25, то корректирующее воздействие может быть использовано как для приводов с гидроцилиндром 19, так и для приводов, имеющих двигатель в виде щарико-винтовой передачи.
Работа устройства на фиг. 2 отличается тем, что колебания расхода в полостях гидроцилиндра 19 при работе на инерционную нагрузку 27 передаются гидравлическими импульсами. Если движение штока 25 плавное, то давления, подводимые через дроссель 31, одинаковы и рабочее тело 14 не приходит в движение при движении штока 25, работающего в обычном режиме по сигналу
управления от преобразовате,ая 1, как это описано.
В случае колебательного движения штока 25 возникает динамическое нарастание
перепада давления в полостях гидроцилиндра 19, отчего приходит в движение поршень датчика 30 и на дросселе 31 возникает перепад давления. Этот перепад давления через элементы 32, 33 воздействует на рабочее тело 14 и приводит в дополнительное движекие распределитель 18. Тем самым уменьшается скорость нарастания давления в полости гидроцилиндра 19, что демпфирует колебания штока 25. Требуемые характеристики режима коррекции обеспечиваются
с учетом параметров дросселя 31 и датчика 30.
Следует отметить, что при рассмотренном движении распределителя 18 от гидромеханического воздействия из полости гидроцилиндра 19 происходит одновременно и движение рабочего тела 14. При этом движении возникает электрический сигнал, который можно снимать с электродов 28, 29. Использование этого электрического сигнала возможно, например, для расширения диапазона регулирования характеристик коррекции. В частности, возможно сравнение фаз электросигнала управления в преобразователе 1 и указанного электросигнала из преобразователя 2 с последующим изменением сигнала в преобразователе 1 для дополнительной коррекции движения штока 25 совместно с нагрузкой 27. Возможно замыкание накоротко электродов 28, 29, например для демпфирования, в случае необ.ходимости движения рабочего тела 14 под действием гидромеханического в.оздействия (демиф;.рование за счет реакции рабочсчч) ie.ia 14 при его движении в магнитном поле) и т. п. Работа по фиг. 3 происходит при отсутствии необходимости в дополните-|Ьно 5 управлении от преобразователя 2 и поэтому определяется лишь требованиями балансировки при действии перегрузок. В свя.г.;; с эти.м влкс- то иланетарногс редуктора 6 использован дифференциальный двуплечий рычаг 34. а расположение полюсов магнита 36 изменены на обратные по отношению к ио.чюсам
45
магнита оо.
Такое обратное включение обеспе исзг.ет взаимное противовключение сил о: )у- зок на двуплечем рычаге,34, что очевидно из схемы фиг. 3 при прило/ксмпг, СП, иере- грузок на обоих рабочих телах 13 ii 14 i; о...;
50 наковом направлении. Сигнал управления поступает одновременно в преобразователи 1, 2.
Работа в соответствии с сигналом управления происходит аналогично описанию по фиг. 1.
Преимущества устройства управления приводом заключаются в его работоспособности практически в неограниченном диапазоне перегрузок в сочетании с возможностью
введения дополнительных управляющих или корректирующих воздействий, улучшающих характеристики и расширяющих в итоге функциональные возможности.
Формула изобретения
1. Устройство управления приводом, coj держащее входной электромеханический преобразователь с подвижным изолированным от полюсов рабочим телом, соединенным электродами с задатчиком и кинематически связанным с преобразователем перемещения :рабочего тела в перемещение первого кас- ;када гидроусилителя, отличающееся тем, ;что, с целью расширения функциональных возможностей и повышения точности, оно снабжено дополнительным электромеханическим преобразователем, эквивалентным входному электромеханическому преобразователю, а также регулируемым механизмом балансировки с дифференциальными входами, каждый из которых кинематически
вязан с рабочим телом одного из электромеханических преобразователей, а рабочим выходом - с преобразователем перемещения, причем рабочие тела электромеханиче- ских преобразователей одинаково ориентированы в пространстве относительно направления воздействия перегрузки.
2.Устройство поп. 1, отличающееся тем, что механизм балансировки выполнен в виде планетарного редуктора, коронная и солнечная шестерни которого связаны с рабочими телами электромеханических преобразователей, а водило - с преобразователем перемещения.
3.Устройство по пп. 1 и 2, отличающееся тем, что оно снабжено формирователем корректируюш.его сигнала, подключенным к дополнительному электромеханическому преобразователю.
4.Устройство по пп. 1-3, отличающееся тем, что по меньшей мере один электромеханический преобразователь выполнен в виде магнитогидродина.мической машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Электрогидравлический следящий привод | 1989 |
|
SU1754918A1 |
| Стенд для испытания механизмов возвратно-поступательного действия | 2021 |
|
RU2791459C2 |
| Полуавтомат для обработки деталей по контуру | 1981 |
|
SU1057003A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
Изобретение относится к гидроавтоматике и может быть использовано в следящих системах транспортных средств, манипуляторов и летательных аппаратов. Цель изобретения - расширение функциональных возможностей и повышение точности. Сигнал управления из блока 5 проходит от электрода 3 к электроду 4, обеспечивая перемещение рабочего тела 13. Далее движение передается через шестерню 8 и водило 9 на распределитель 18 и гидроцилиндр 19. Рычаг 21 возвращает распределитель 18 в исходное положение, а от датчика 20 поступает сигнал отрицательной обратной связи в блок 5, где он нейтрализует сигнал управления и шток 25 останавливается. Если на устройство действуют перегрузки вдоль направления движения рабочего тела 13, то балансировка осуществляется с помощью преобразователя 2, рабочее тело 14 которого обеспечивает формирование встречного усилия на шестерне 7 и исключает непредусмотренные движения водила 9 и распределителя 18. На электроды 28, 29 может быть подан корректирующий сигнал или они могут быть закорочены. В случае колебательного движения штока 25 на дросселе возникает перепад давления, воздействующий через преобразователь 2 на распределитель 18 для уменьшения скорости нарастания давления в полостях гидроцилиндра 19. 3 з.п.ф-лы, 4 ил.
J J5- 4 15 б 23 д 101112 / 15 2В /4 J5
26
1
/
25
19 20
Фаг..
J5 4 15 6 10 712 Й 5 28 JS
I -I
-р-Чj
J« 6 28 JS
LL lUfriH
Фиг. 4
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
