птп/пщп I -р№//тт7|„гп(
.,(, /./i/i.f, /i/,
| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоукладчик | 1974 |
|
SU511281A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| Устройство для учета кривизны уровенной поверхности объекта | 1973 |
|
SU460437A1 |
| Устройство для дистанционного измерения и регистрации средней скорости и направления ветра | 1959 |
|
SU129043A1 |
| Машина для посадки саженцев на склонах | 1990 |
|
SU1738121A1 |
| Устройство для автоматического разобщения привода высевающих аппаратов посевных машин | 1985 |
|
SU1289399A1 |
| Качающийся питатель | 1981 |
|
SU1008108A1 |
| Установка для мойки | 1981 |
|
SU1050767A1 |
| Конвейерный гусеничный привод | 1990 |
|
SU1778047A1 |
| УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА ПОЛЫХ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ | 1992 |
|
RU2018228C1 |
Изобретение относится к подъемным механизмам. Цель изобретения - повышение надежности. Кабелеукладчик содержит ходовой винт 1, на котором установлена каретка 2 с направляющими валиками 3. Ходовой винт посредством дифференциала 4 и двух пар конических шестерен кинематически связан с барабаном 7. Корпус 8 дифференциала через пару шестерен 9 связан с приводом 10, управляемым посредством блока 11 управления. На каретке установлены ступица двуплечего рычага, внутри которой закреплен статор 14 сельсина-датчика, и два концевых выключателя 15. Ротор сельсина-датчика соединен с поводком 17, на конце которого закреплено несущее кабель 18 кольцо 19. На опоре 20 установлены упоры 21. Статор 22 сельсина-приемника электрически связан со статором сельсина-датчика, а ротор 23 сельсина-приемника кинематически связан с блоком управления. При нарушении синхронного движения каретки 2 за счет погрешностей укладки кабеля 18 на барабан 7 кабель 18 отклоняет поводок 17 из вертикальной плоскости, проходящей через продольную ось двуплечего рычага 13 в ту или иную сторону, проворачивая одновременно ротор сельсина-датчика относительно его статора 14 на некоторый угол. Одновременно проворачивается и ротор сельсина-приемника. Возникший в результате этого сигнал с блока 11 поступает на привод 10, который, раскручивая корпус 8 дифференциала в ту или иную сторону, изменяет частоту вращения винта 1, и соответственно скорость перемещения каретки 2. 3 ил.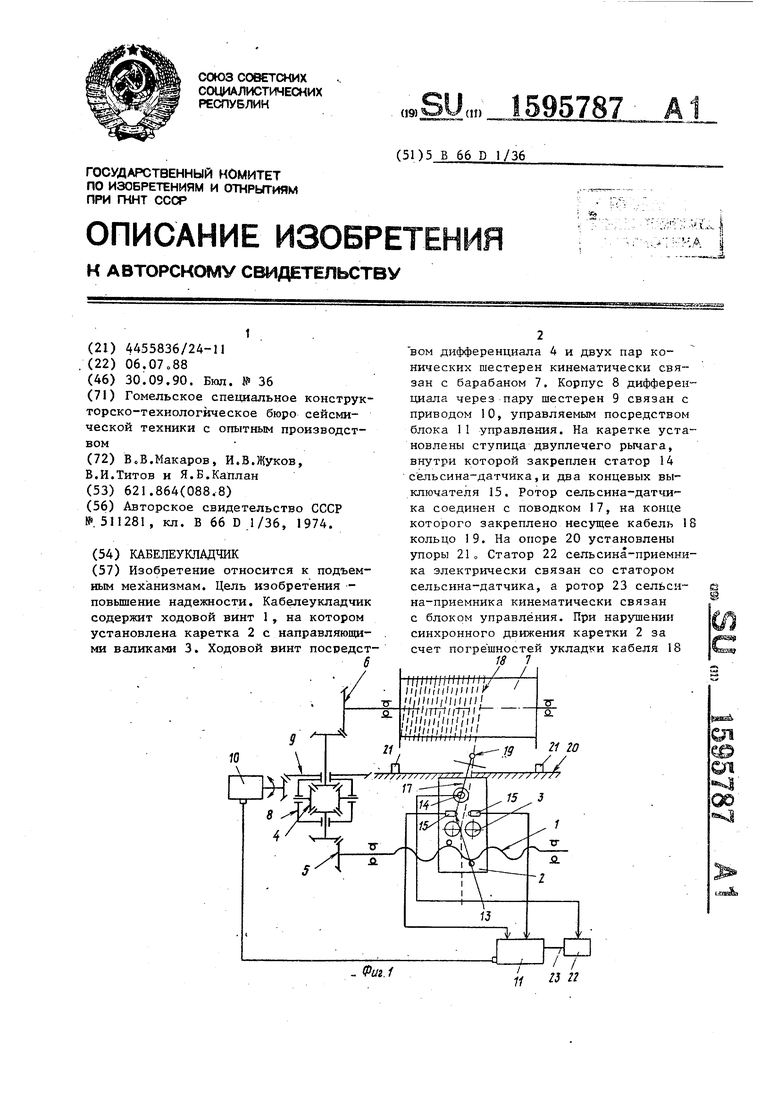
ТО
11
IV г1 :- 777 7Г777
In IFrl
V -f-
Л
на барабан 7 кабель 18 отклоняет поводок 17 из вертикальной плоскости, проходящей через продольную ось дв1у- плечего рьтага 13 в ту или иную сторону, проворачивая одновременно ротор сельсина-датчика.относительно его статора 1А на некоторый угол. Одновременно проворачивается и ротор
Изобретение относится к подъемным механизмам, а именно к кабелеуклад-
чикам,
Целью изобретения является повышение надежности
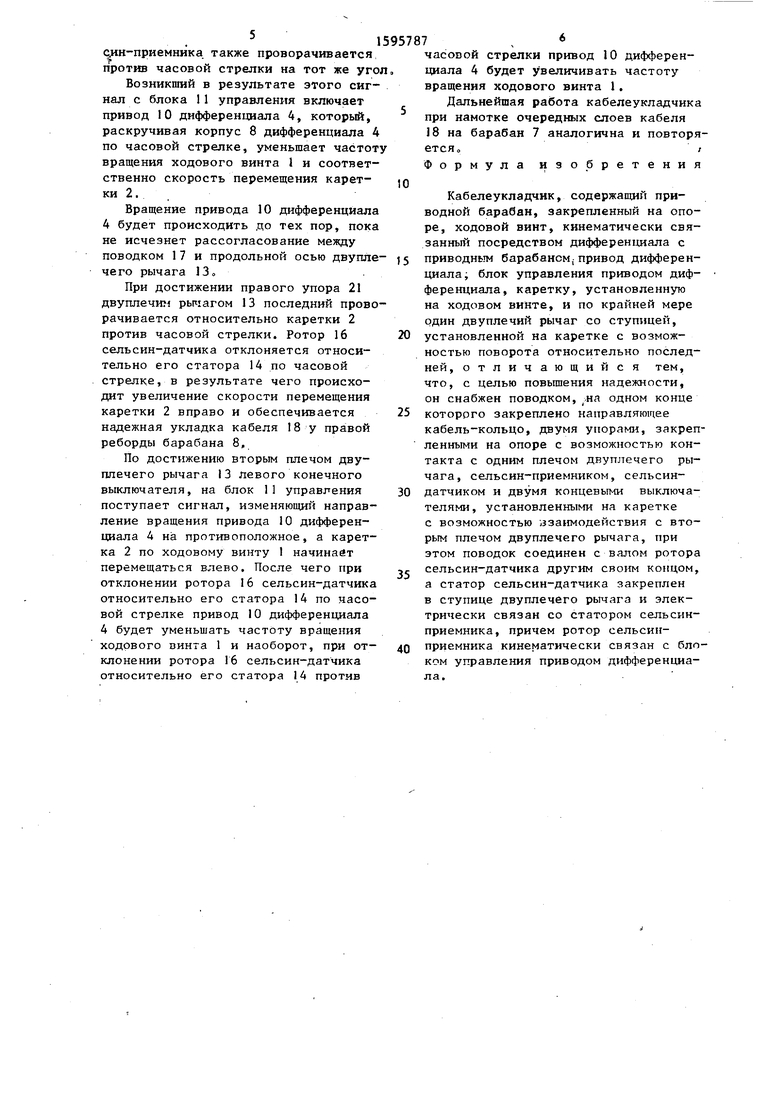
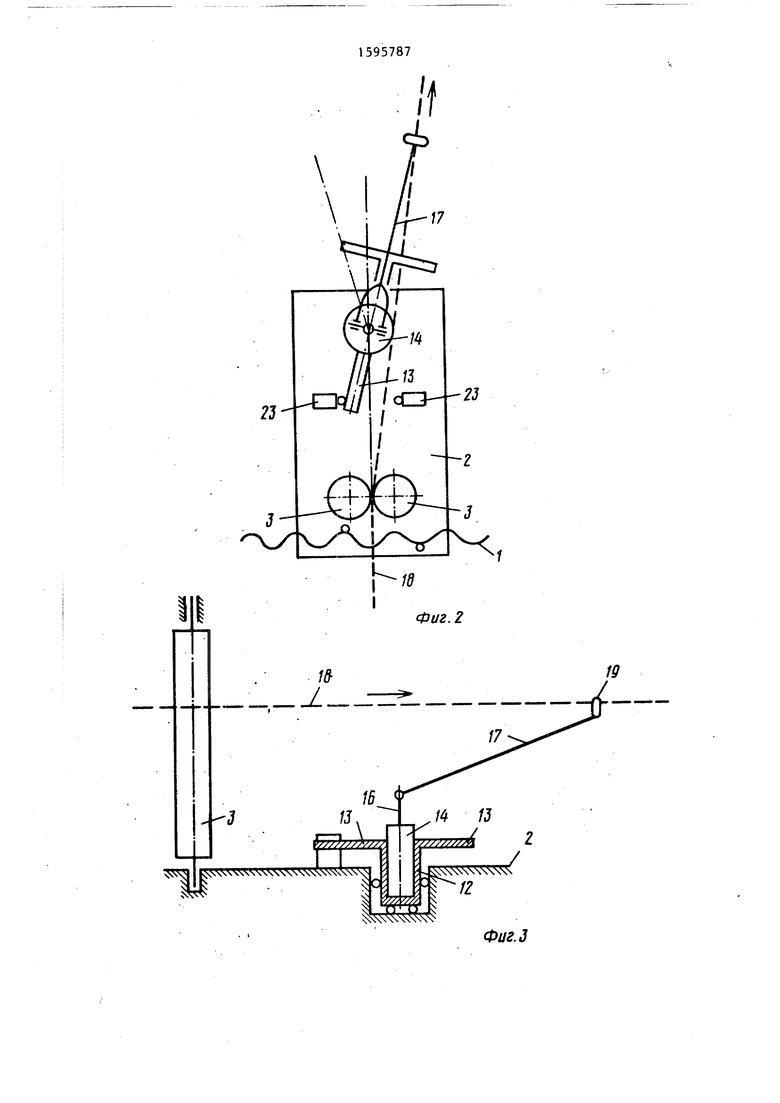
На фиг.1 изображена кинематическа схема кабелеукладчика; на фиго2 - каретка, вид сверху; на фиг.З - то же, вид сбоку; на фиг.А - то же, в крайнем правом положении, вид сверху
Кабелеукладчик содержит ходовой винт 1, на котором установлена ка- ретка 2 с направляющими валиками Зо Ходовой винт 1 посредством дифференциала 4 и двух пар конических шестерен 5, 6 кинематически связан с приводным барабаном 7.
Корпус 8 дифференциала 4 через коническую пару шестерни 9 соединен с приводом 10 дифференциала 4, управляемым посредством блока 11 управления. ,,
На каретке 2 с возможностью поворота относительно вертикальной оси установлена ступица I2 двуплечего рычага 13, внутри которой закреплен статор 14 сельсин-датчика. На карет- ке 2 размещены два концевых выключателя 15, электрически связанных с блоком 1I управления и поочередно взаимодействующих с одним плечом двуплечего рычага 13, ротор 16 син-датчика соединен с поводком 17, на другом конце которого закреплено направляющее кабель 18 кольцо 19,,
На опоре 20 по краям приводного барабана 8 с возможностью контакта со вторым плечом двуплечего рычага 13 установлены два упора 21 о Статор 22 сельсин-приемника, закрепленш ш на опоре 20, электрически связан со статором 14 сельсин-датчика, а ротор 23 сельсин-прием1шка кинематически связан с блоком П управления
Устройство работает следующим образом.
сельсина-приемника. Возникший в результате этого сигнал с блока 11 по- .ступает на привод 10, который, раскручивая корпус 8 дифференциала в ту или иную сторону, изменяет частоту вращения винта 1 и соответственно скорость перемещения каретки 2. 4 ил о
При нормальной работе вращение от приводного барабана 7 через дифференциал 4 и две пары конических шестерен 5, 6 передается ходовому вилту 1, который перемещает каретку 2, например вправо, синхронно относительно приводного барабана 7. За каждый оборот приводного барабана 7 каретка 2 совершает перемещение, равное диаметру кабеля 18„ Двуплечий рычаг 13 повернут вправо до упора одним своим концом в осевой концевой выключатель 15, а поводок 17 располагается в вертикальной плоскости, проходящей через продольную ось двуплечего рычага 13.
При нарушении синхронного движения каретки 2 за счет погрешностей укладки кабеля 18 на приводной барабан 7 происходит следующее. В случае запаздывания каретки 2, кабель 18 отклоняет поводок 17 вправо от продольной оси двуплечего рычага 13, проворачивая ротор 16 сельсин-датчика относительно его статора. 14 по часовой стрелке на некоторый угол. Ротор 23 ч;ельсин-приемника проворачивается на тот же угол Возникший в результате этого сигнал с блока 11 управления поступает на привод 10 дифференциала 4, который раскручивает корпус 8 дифференциала 4 против часовой стрелки, увеличивает частоты вращения ходового винта 1 и соответственно скорость перемещения каретки 2. Вращение привода 10 дифференциала 4 будет происходить до тех пор, пока не исчезнет рассогласование между поводком 17 и продольной осью двуплечего рычага 13
1
При увеличенной скорости перемещения каретки 2 кабель 18 отклоняет поводок 17 влево от продольной оси двуплечего рычага 13, проворачивая ротор 16 сельсин-датчика относительн его статора 14 против часовой стрелки на некоторый угол. Ротор 23 сельс 1Н-приемника также проворачивается против часовой стрелки на тот же угол
Возникший в результате этого сигнал с блока 11 управления включает привод 10 дифференциала 4, которьй, раскручивая корпус 8 дифференциала 4 по часовой стрелке, уменьшает частоту вращения ходового винта 1 и соответственно скорость перемещения каретки 2 .
Вращение привода 10 дифференциала 4 будет происходить до тех пор, пока не исчезнет рассогласование между
поводком 17 и продольной осью двупле- J5 приводньзм барабаном,привод дифференчего рычага 13 .
При достижении правого упора 21 двугшечи pbit aroM 13 последний проворачивается относительно каретки 2 против часовой стрелки. Ротор 16 сельсин-датчика отклоняется относительно его статора 14 по часовой стрелке, в результате чего происходит увеличение скорости перемещения каретки 2 вправо и обеспечивается надежная укладка кабеля 18 у правой реборды барабана 8,
По достижению вторым плечом двуплечего рычага 13 левого конечного выключателя, на блок 11 управления поступает сигнал, изменяющий направление вращения привода 10 дифференциала 4 на противоположное, а каретка 2 по ходовому винту 1 начинает перемещаться влево. После чего при отклонении ротора 16 сельсин-датчика относительно его статора 14 по часовой стрелке привод 10 дифференциала 4 будет уменьшать частоту вращения ходового винта 1 и наоборот, при отклонении ротора 16 сельсин-датчика относительно его статора 14 против
20
25
30
35
40
циала; блок управления приводом дифференциала, каретку, установленную на ходовом винте, и по крайней мере один двуплечий рычаг со ступицей, установленной на каретке с возможностью поворота относительно последней, отличающийся тем, что, с целью повьппения надежности, он снабжен поводком, .на одном конце которого закреплено направляющее кабель-кольцо, двумя упорами, закрепленными на опоре с возможностью контакта с одним плечом двуплечего рычага, сельсин-приемником, сельсин- датчиком и двумя концевыми выключателями, установленными на каретке с возможностью взаимодействия с вторым плечом двуплечего рычага, при этом поводок соединен с валом ротора сельсин-датчика другим своим ко1гцом, а статор сельсин-датчика закреплен в ступице двуплечего рычага и электрически связан со статором сельсин- приемника, причем ротор сельсин- приемника кинематически связан с блоком управления приводом дифференциала.
1595787
часовой стрелки привод 10 дифференциала 4 будет увеличивать частоту вращения ходового винта 1.
Дальнейшая работа кабелеукладчика при намотке очередных слоев кабеля 18 на барабан 7 аналогична и повторяется /Формула изобретения
Кабелеукладчик, содержащий приводной барабан, закрепленный на опоре, ходовой винт, кинематически связанный посредством дифференщ ала с
0
5
0
5
0
циала; блок управления приводом дифференциала, каретку, установленную на ходовом винте, и по крайней мере один двуплечий рычаг со ступицей, установленной на каретке с возможностью поворота относительно последней, отличающийся тем, что, с целью повьппения надежности, он снабжен поводком, .на одном конце которого закреплено направляющее кабель-кольцо, двумя упорами, закрепленными на опоре с возможностью контакта с одним плечом двуплечего рычага, сельсин-приемником, сельсин- датчиком и двумя концевыми выключателями, установленными на каретке с возможностью взаимодействия с вторым плечом двуплечего рычага, при этом поводок соединен с валом ротора сельсин-датчика другим своим ко1гцом, а статор сельсин-датчика закреплен в ступице двуплечего рычага и электрически связан со статором сельсин- приемника, причем ротор сельсин- приемника кинематически связан с блоком управления приводом дифференциала.
1
Фиг. 2
JwwwwФиг.З
ФигЛ
| Канатоукладчик | 1974 |
|
SU511281A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
