Предложение относится к области изготовления пневматических камер для веломотоавтошин.
Известен полуавтомат для стыковки резиновых пневмокамер, состоящий из станины, в верхней части которой расположен суппорт с ножами, а в средней части - тиски с зажимными пластинами, наковальня и пневмопривод, взаимосвязанный с суппортом, тисками и наковальней.
Однако в этом полуавтомате при ступенчатых срезах сближение стенок пневмотрубки на стыкование происходит неодновременно, нижние ступени сближаются раньше верхних, поэтому расходование материала стенок на стыке неодинаково. Кроме того, из-за тонкостенности пневмотрубок нижние ступени не выдерживают продольного сжатия, происходит продольный изгиб с подворотом стенок и в стык попадают талькированные поверхности стенок, которые не дают спая, а концы пневмотрубки после обрезки и опускания поддерживающего стола (наковальни) оказываются в пространстве за пределами поддерживающих плоскостей колодок. Все это ослабляет прочность стыка и делает невозможным стыкование тонкостенных пневмокамер.
Предлагаемый полуавтомат для стыкования пневмокамер выполняет стыковку так, что стык пневмотрубки образуется между плоскостями поворотной и неподвижной колодок, закрепленных на подвижной каретке, связанной с трехпоршневым пневмогидродвигателем.
Это достигается тем, что одна из колодок С1монтирована неподвижной, а другая - поворотная - через подвижное сочленение с пружиной связана с валом, взаимодействующим через шестеренку с рейкой. Кроме того, суппорт снабжен собачкой, входящей в зацепление с рейкой поворотного вала, а привод каретки выполнен в виде трехпоршневого пневмогидродвигателя, снабженного регулируемыми ограничителями хода порщня, с дроссельными регуляторами, регулирующими время выдержки при задержках движения.
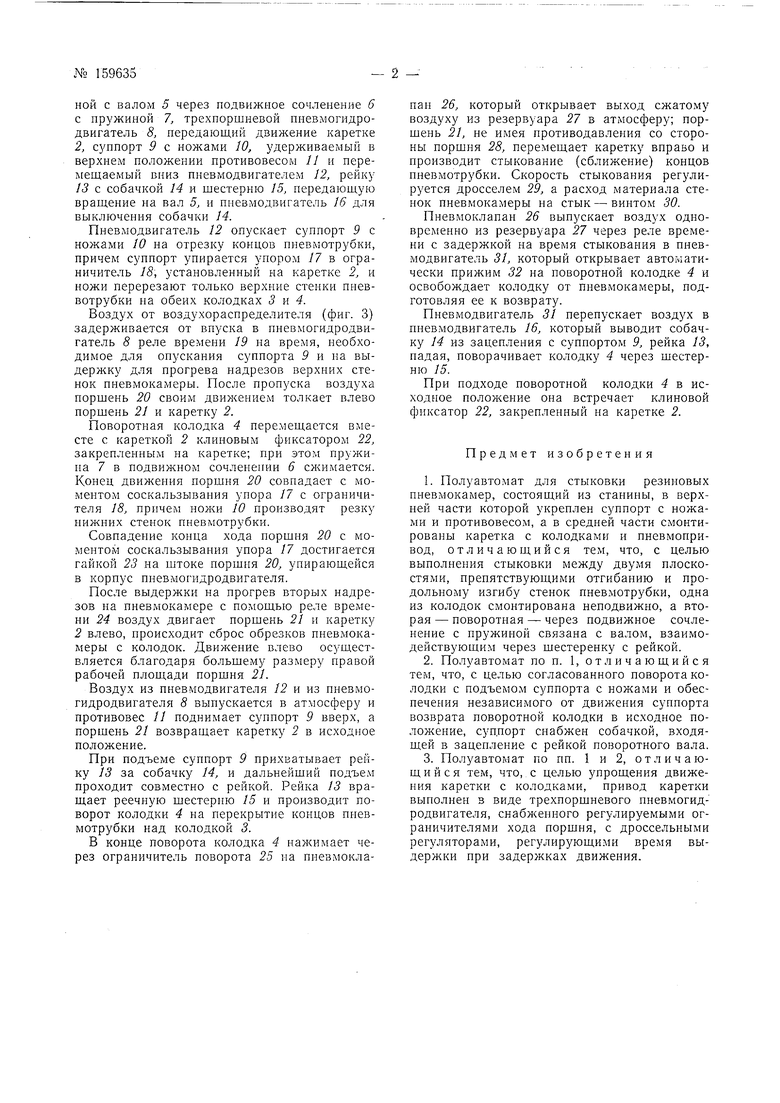
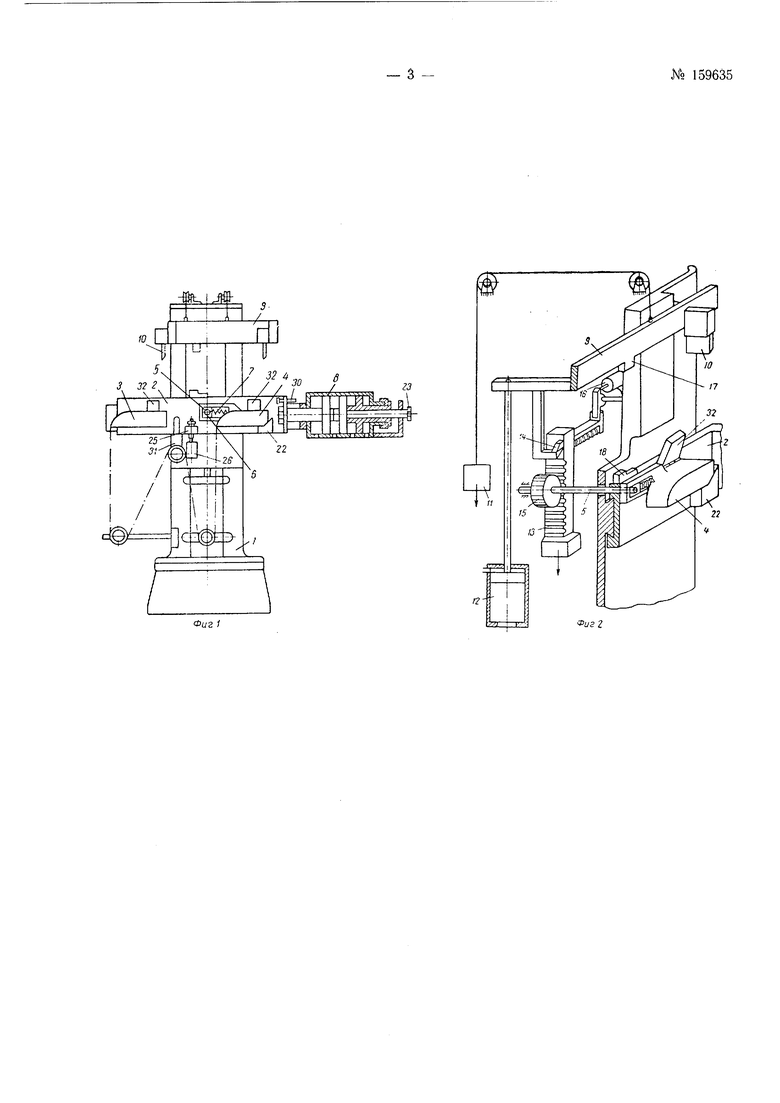
Па фиг. 1 изображен предлагаемый полуавтомат, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 приведена рабочая схема полуавтомата.
Полуавтомат содержит (фиг. 1) станину 1, на которой располол ена подвижная каретка 2, с закрепленными на ней неподвижной колодкой 3 и поворотной колодкой 4, соединенной с валом 5 через подвижное сочленение 6 с пружиной 7, трехпоршневой пневмогидродвигатель 8, передающий движение каретке 2, суппорт 9 с ножами 10, удерживаемый в верхнем положении противовесом // и перемещаемый вниз пневмодвигателем 12, рейку /( с собачкой 14 и шестерню J5, передающую вращение на вал 5, и пневмодвигатель 16 для выключення собачки 14.
Пневмодвигатель 12 опускает суппорт 9 с ножами 10 на отрезку концов пневмотрубки, причем суппорт упирается упором 17 в ограничитель 18, установленный на каретке 2, и ножи перерезают только верхние стенки пневвотрубки на обеих колодках 3 и 4.
Воздух от воздухораспределителя (фиг. 3) задерживается от впуска в пневмогидродвигатель 8 реле времени 19 на время, необходимое для онускания суппорта 9 н на выдержку для прогрева надрезов верхних стенок пневмокамеры. После пропуска воздуха поршень 20 своим движением толкает влево поршень 21 и каретку 2.
Поворотная колодка 4 перемещается вместе с кареткой 2 клиновым фиксатором 22, закреп.ченным на каретке; нри этом пружина 7 в подвижном сочленении 6 сжимается. Конец движения поршня 20 совпадает с моментом соскальзывания упора /7 с ограничителя 18, причем ножи 10 производят резку нижних стенок нневмотрубки.
Совпадение конца хода поршня 20 с моментом соскальзывания упора 17 достигается гайкой 23 на штоке поршня 20, упирающейся в корпус пневмогидродвигателя.
После выдержки на прогрев вторых надрезов на пневмокамере с помощью реле времени 24 воздух двигает поршень 21 и каретку 2 влево, происходит сброс обрезков пневмокамеры с колодок. Движение влево осуществляется благодаря большему размеру правой рабочей площади поршня 21.
Воздух из пневмодвигателя 12 и из нневмогидродвигателя 8 выпускается в атмосферу и противовес // поднимает суппорт 9 вверх, а поршень 21 возвращает каретку 2 в исходное положение.
При подъеме суппорт 9 прихватывает рейку 13 за собачку 14, и дальнейший подъем проходит совместно с рейкой. Рейка 13 вращает реечную шестерню 15 и производит поворот колодки 4 на перекрытие концов пневмотрубки над колодкой 5.
В конце поворота колодка 4 нажимает через ограничитель поворота 25 на пневмоклапан 26, который открывает выход сжатому воздуху из резервуара 27 в атмосферу; поршень 21, не имея противодавления со стороны поршня 28, перемещает каретку вправо и производит стыкование (сближение) концов нневмотрубки. Скорость стыкования регулируется дросселем 29, а расход материала стенок пневмокамеры на стык - винтом 30.
Пневмоклапан 26 выпускает воздух одновременно из резервуара 27 через реле времени с задержкой на время стыкования в пневмодвигатель 31, который открывает автоматически прижим 32 на поворотной колодке 4 и освобождает колодку от пневмокамеры, подготовляя ее к возврату.
Пневмодвигатель 31 перепускает воздух в нневмодвигатель 16, который выводит собачку 14 из зацепления с суппортом 9, рейка 13, падая, поворачивает колодку 4 через шестерню 15.
При подходе поворотной колодки 4 в исходное положение она встречает клиновой фиксатор 22, закрепленный на каретке 2.
Предмет изобретения
1.Полуавтомат для стыковки резиновых пневмокамер, состоящий из станины, в верхней части которой укреплен суппорт с ножами и противовесом, а в средней части смонтированы каретка с колодками и пневмопривод, отличающийся тем, что, с целью выполнения стыковки между двумя плоскостями, препятствующими отгибанию и продольному изгибу стенок пневмотрубки, одна из колодок смонтирована неподвижно, а вторая - поворотная - через подвижное сочленение с пружиной связана с валом, взаимодействующим через шестеренку с рейкой.
2.Полуавтомат по п. 1, отличающийся тем, что, с целью согласованного поворота колодки с подъемом суппорта с ножами и обеспечения независимого от движения суппорта возврата поворотной колодки в исходное положение, суппорт снабжен собачкой, входящей в зацепление с рейкой поворотного вала.
3.Полуавтомат по пп. 1 и 2, отличающийся тем, что, с целью упрощения движения каретки с колодками, привод каретки выполнен в виде трехпоршневого пневмогидродвигателя, снабженного регулируемыми ограничителями хода поршня, с дроссельными регуляторами, регулирующими время выдержки при задержках движения.
1
г/г 2
Фиг 3
23