Изобретение относится к машиностроению, а именно к подъемным устройствам телескопического типа, и может быть использовано в манипуляторах.
Цель изобретения - повышение грузоподъемности путем повышения жесткости привода подъемника,
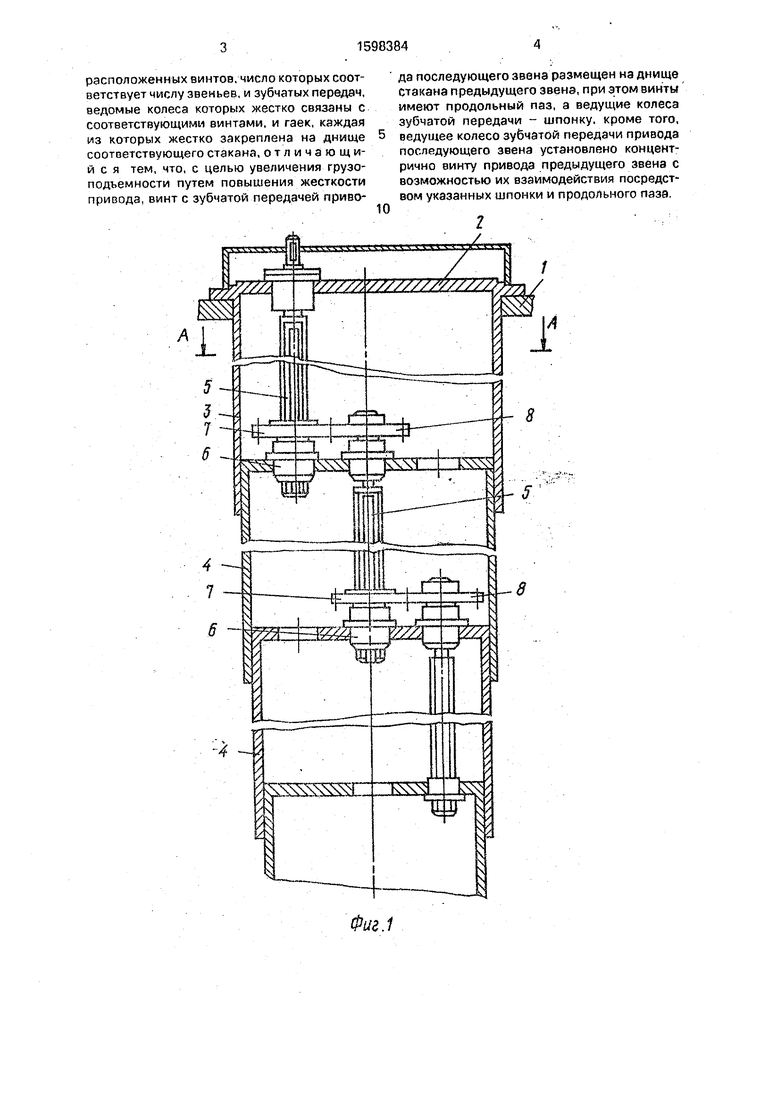
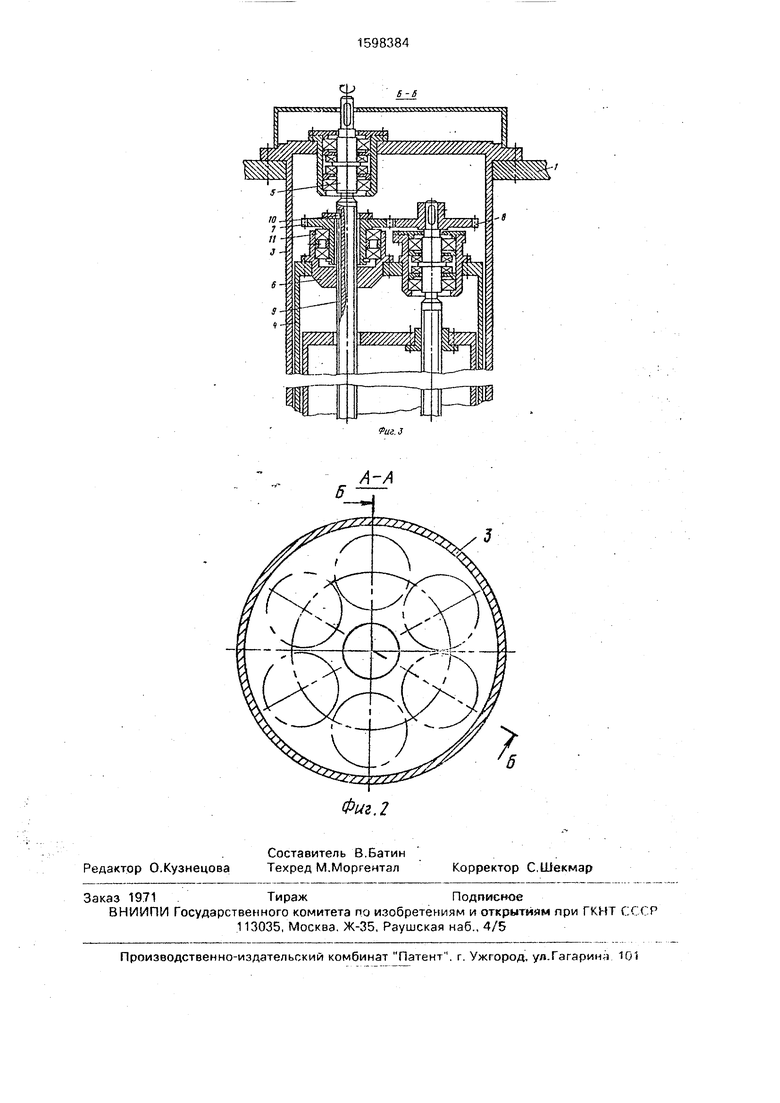
На фиг. 1 изображена принципиальная схема подъемника; на фиг.2 - сечение А-А на фиг.1; на фиг:.3 - сечение Б-Б на фиг.2.
На тележке 1 манипулятора закреплена телескопическая стойка 2, звенья которой выполнены в виде неподвижного2 и подвижных 4 стаканов. Винтовой привод звеньев состоит из винтов 5, сопряженных с гайками 6, и ведущих 7 и ведомых 8 зубчатых колес, установленных на днище соответствующего стакана. Винты 5 привода звеньев имеют продольные пазы 9, взаимодействующие со щпонками 10 ведущих колес 7 привода последующих звеньев, которые установлены с помощью подшипников 11 в гайках 6 предыдущих звеньев.
Подъемник работает следующим образом. При своем вращении винт 5 с помощью
гайки 6 перемещает стакан 4 во внутренней поверхности неподвижного стакана 3. Одновременно винт 5 с помощъю продольного паза 9 и шпонки 10 ведущего зубчатого колеса 7 передает вращение последней и далее на ведомое зубчатое колесо 8 и винт 5 привода последующего звена, который через гайку 6 перемещает стакан 4 последующего звена. При этом зубчатые колеса 7 и 8 и винт 9 привода последующего звена перемещаются вместе со стаканом 4 предыдущего звена.
При одинаковых числах зубьев колес 7 и 8 и при одинаковом шаге винтов 5 стаканы 4 звеньев выдвигаются на одинаковую величину. При необходимости можно менять величину перемещения звеньев относительно Друг друга путем соответствующего подбора чисел зубьев зубчатых колес или шага винтовых пар,
Формула изобретения Подъемник манипулятора, содержащий телескопическую стойку, звенья которой выполнены в виде стаканов, винтовой привод звеньев, выполненный в виде параллельно
сл
с
сл
vO
со
Сл 00
ь
расположенных винтов/число которых соответствует числу звеньев, и зубчатых передач, ведомые колеса которых жестко связаны с соответствующими винтами, и гаек, каждая из которых жестко закреплена на днище соответствующего стакана, отличающийся тем, что, с целью увеличения грузоподъемности путем повышения жесткости привода, винт с зубчатой передачей приво 4
да последующего звена размещен на днище стакана предыдущего звена, при этом винты имеют продольный паз, а ведущие колеса зубчатой передачи - шпонку, кроме того, ведущее колесо зубчатой передачи привода последующего звена установлено концент- рично винту привода предыдущего звена с возможностью их взаимодействия посредством указанных шпонки и продольного паза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой домкрат | 1990 |
|
SU1735205A1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| Модуль манипулятора | 1985 |
|
SU1329962A1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2298714C2 |
| Устройство для штамповки | 1978 |
|
SU713706A1 |
| КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2050488C1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1992 |
|
RU2021092C1 |
| Винтовой телескопический домкрат | 1976 |
|
SU610783A1 |
Изобретение относится к машиностроению, в частности к подъемным устройствам телескопического типа, и может быть использовано в манипуляторах. Целью изобретения является повышение грузоподъемности путем повышения жесткости привода подъемника. При вращении винта 5 с помощью гайки 6 по внутренней поверхности неподвижного стакана 3 перемещается подвижный стакан 4. Одновременно винт 5 с помощью продольного паза 9 и шпонки 10 ведущего зубчатого колеса 7 передает вращение последней и далее на ведомое зубчатое колесо 8 и винт5 привода последующего звена, который с помощью гайки 6 перемещает стакан 4 последующего звена. 3 ил.
Фиг.1
А-А
| Подъемник телескопического типа | 1974 |
|
SU498157A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
