Ю СЛ 4
СлЭ
Изобретение относится к системам управления и может быть использовано при управлении производственными механизмами, совершающими последовательные движения по замкнутому циклу.
Известны устройства путевого управления производственными механизмами с поступательным перемещением механизма вперед и возвратом его в исходное положение.
Недостатком известных устройств является невозможность перемещения механизмов в двух противоположных направлениях от исходного положения.
Из известных устройств наиболее близким по технической сущности является устройство управления производственными механизмами, перемешивающимися по замкнутому циклу в направлении 1 и противоположном ему направлению 2, содержащее первое промежуточное реле с двумя замыкающими контактами, второе промежуточное реле с двумя размыкающими и двумя замыкающими контактами, электромагниты Направление 1 и Направление 2, а также первый датчик исходного положения с одним размыкающим контактом, датчик крайнего положения Направление 1 с одним замыкающим контактом и кнопки управления Направление 1 и Направление 2, при этом обмотки промежуточных реле и электромагнитов Направление 1 и Направление 2 одними из выводов подключены к первой шине питания непосредственно, другой вывод обмотки первого промежуточного реле подключен ко второй шине питания через последовательно соединенные первый размыкающий контакт второго промежуточного реле и кнопку управления Направление 1, шунтированную первым замыкающим контактом первого промежуточного реле, а другой вывод обмотки второго промежуточного реле-через кнопку управления Направление 2, параллельно которой включены первый замыкающий контакт датчика крайнего положения Направление 1 и первый замыкающий контакт второго промежуточного реле, другие выводы обмотки электромагнитов Направление 1 и Направление 2 подключены к второй шине питания соответственно через последовательно соединенные второй замыкающий контакт первого промежуточного реле и второй размыкающий контакт второго промежуточного реле, и второй замыкающий контакт второго промежуточного реле.
Это устройство обеспечивает перемещение механизма из исходного положения в заданное и возврат его назад. Рели необходимо перемещение механизма в доу противоположных направлениях от исходного положения, то эта задача может быть решена при помощи двух таких систем управления. Но такая комбинация из двух устройств не обеспечивает безопасной работы механизма, т.к. при необходимости аварийного отвода механизма в исходное положение, остается неопределенным на0 правление движения к исходному положе- йию. Кроме того, такое решение не обеспечивает непрерывность отработки цикла в одном, а затем в другом направлении.
5 Цель изобретения - расширение технологических возможностей и повышение надежности.
Поставленная цель достигается тем, что устройство управления производственны0 ми механизмами, перемещающимися по замкнутому циклу в направлении 1 и противоположном ему направлении 2, содержащее первое промежуточное реле с двумя замыкающими контактами, второе проме5 жуточное реле с двумя размыкающими и двумя замыкающими контактами, электромагниты Направление 1 и Направление 2, а также первый датчик исходного положения с одним размыкающим контактом и
0 датчик крайнего положения Направление 1 с одним замыкающим контактом и кнопки управления Направление 1 и Направление 2, при этом обмотки промежуточных реле и электромагнитов Направление 1 и
5 Направление 2 одними из выводов подключены к первой шине питания непосредственно, другой вывод обмотки первого промежуточного реле подключен к второй шине питания через последовательно сое0 диненные первый размыкающий контакт второго промежуточного реле и кнопку управления Направление 1, шунтированную первым замыкающим контактом первого промежуточного реле, а другой вывод об5 мотки второго промежуточного реле - через кнопку управления Направление2, параллельно которой включены первый замыкающий контакт датчика крайнего положения Направление 1 и первый замыкающей
0 контакт второго промежуточного реле, другие выводы обмоток электромагнитов Направление 1 и Направление 2 подключены ко второй шине питания соответственно че рез последовательно соединенные второй
5 замыкающий контакт первого промежуточного реле и второй размыкающий контакт второго промежуточного реле и второй замыкающий контакт второго промежуточно го реле, дополнено третьим промежуточным реле с тремя замыкающими и тремя р;пгыкающими контактами, вторым датчиком исходного положения с двумя размыкающими контактами, датчиком крайнего положения Направление 2 с двумя замыкающими контактами, третьей кнопкой управления Отвод, третьим замыкающим и двумя размыкающими контактами первого промежуточного реле, третьим замыкающим, третьим и четвертым размыкающими контактами второго промежуточного реле, вто- рым размыкающим контактом первого датчика исходного положения; вторым замыкающим контактом датчика крайнего положения Направление 1, при этом один из выводов обмотки третьего промежуточного реле подключен к первой шине питания непосредственно, а другой - через последовательно соединенные первый размыкающий контакт первого датчика исходного положения механизма, шунтированный первым размыкающим контактом второго датчика исходного положения механизма, и кнопку управления Отвод, параллельно которой включены первый замыкающий контакт третьего промежуточного реле и группа из последовательно соединенных первого замыкающего контакта датчика крайнего положения Направление 2 и третьего замыкающего контакта второго промежуточного реле, последовательно с обмоткой первого промежуточного реле включен первый размыкающий контакт третьего промежуточного реле, а параллельно первому размыкающему контакту второго промежуточного реле включен второй замыкающий контакт датчика крайнего положения Направление 1, обмотка второго промежуточного реле последовательно соединена со вторым размокающим контактом третьего промежуточного реле, шунтированным вто- рым замыкающим контактом датчика крайнего положения Направление 2, а последовательно с первым замыкающим контактом датчика крайнего положения Направление 1 включен третий замыкаю- щий контакт первого промежуточного реле, параллельно группе из последовательно соединенных второго размыкающего контакта второго промежуточного реле и второго замыкающего контакта первого промежу- точного реле в цепи обмотки электромагнита Направление 1. подключены последовательно соединенные второй размыкающий контакт первого датчика исход- ного положения механизма, первый размыкающий контакт первого промежуточного реле, третий размыкающий контакт второго промежуточного реле и второй замыкающий контакт третьего промежуточного реле, последовательно со вторым
замыкающим контактом второго промежуточного реле в цепи обмотки электромагнита Направление 2 включен размыкающий контакт третьего промежуточного реле, параллельно которым подключены последовательно соединенные второй размыкающий контакт второго датчика исходного положения, второй размыкающий контакт первого промежуточного реле, четвертый размыкающий контакт второго промежуточного реле и третий замыкающий контакт третьего промежуточного реле, причем датчики исходного положения включены таким образом, что при перемещении механизма в направлении 1 во включенном состоянии находится первый датчик исходного положения, а при перемещении в направлении 2 - второй датчик исходного по ложения.
Сущность изобретения заключается в том, что введение дополнительных элементов и изменение электрических связей при необходимости аварийного отвода автоматически обеспечивает выбор направления перемещения механизма из любого положения в исходное, что расширяет технологические возможности устройства и исключает возможность возникновения аварийных ситуаций.
Сравнение заявляемого технического решения с прототипом позволило установить соответствие его критерию новизна.
При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа не были выявлены, а поэтому они обеспечивают заявляемому техническому решению соответствие критерию существенные отличия.
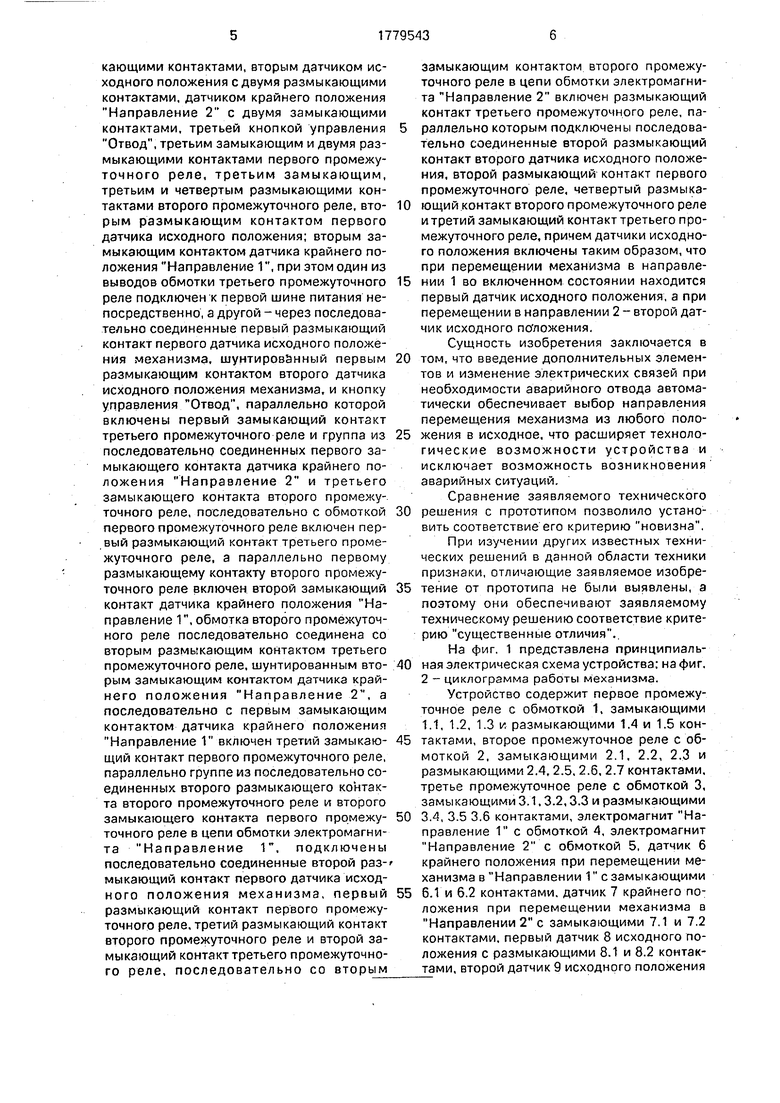
На фиг. 1 представлена принципиальная электрическая схема устройства: на фиг, 2 - циклограмма работы механизма.
Устройство содержит первое промежуточное реле с обмоткой 1, замыкающими 1.1, 1.2, 1.3 и размыкающими 1.4 и 1.5 контактами, второе промежуточное реле с обмоткой 2, замыкающими 2.1, 2.2, 2.3 и размыкающими 2.4,2.5, 2.6, 2.7 контактами, третье промежуточное реле с обмоткой 3, замыкающими 3.1,3.2,3.3 и размыкающими 3.4, 3.5 3.6 контактами, электромагнит Направление 1 с обмоткой 4, электромагнит Направление 2 с обмоткой 5, датчик 6 крайнего положения при перемещении механизма в Направлении 1 с замыкающими 6.1 и 6.2 контактами, датчик 7 крайнего положения при перемещении механизма в Направлении 2 с замыкающими 7.1 и 7.2 контактами, первый датчик 8 исходного положения с размыкающими 8.1 и 8.2 контактами, второй датчик 9 исходного положения
с размыкающими 9.1 и 9.2 контактами, кнопки управления 10-12 Направление 1, Направление 2 и Отвод соответственно.
Датчики исходного положения 8 и 9 включены так, что при перемещении механизма в направлении 1 во включенном состоянии находится первый датчик 8 исходного положения, а при перемещении в направлении 2 - второй датчик 9 исходного положения.
Устройство работает следующим образом.
В исходном положении включены оба датчика 8 и 9 исходного положения. При нажатии на кнопку 10 Направление 1 подается питание на первое промежуточное реле с обмоткой 1, замыкающий контакт 1.1 которого замыкает цепь самопитания, а замыкающий контакт 1.2 образует цепь питания обмотки4 электромагнита Направление 1. Механизм перемещается, например, влево по фиг. 2. При его перемещении отключается второй датчик 9 исходного положения, а в конце перемещения срабатывает датчик 6 крайнего положения Направление 1. По цепи - контакт 1.3 первого промежуточного реле - контакт 6.2 датчика б крайнего положения Направление 1 - контакт 3.5 третьего промежуточного реле подается питание на обмотку 2 второго промежуточного реле, замыкающий контакт 2.1 которого образует цепь его самопитания, замыкающий контакт 2.2 замыкает цепь питания обмотки 5 электромагнит Направпение 2, а размыкающий контакт 2.5 обрывает цепь питания обмотки 4 электромагнита Направление 1. Осуществляется реверс механизма, при ко тором он начинается перемещаться вправо по чертежу (см, фиг. 2). При его перемещении отключается датчик 6 крайнего положения Направление 1, размякающий контакт 6.1 которого отключает от шин питания обмотку 1 первого промежуточного реле. При перемещении механизма включается второй датчик 9 исходного положения и отключается первый датчик 8 исходного положения. При дальнейшем перемещении в крайнем положении направления 2 срабатывает датчик 7 крайнего положения Направление 2, По цепи замыкающие контакты 2.3 и 7.1 соответственно второго промежуточного реле и датчика 1 крайнего положения Направление 2, размыкающий контакт 8.1 первого датчика 8 исходного положения - подается питание на обмотку 3 третьего промежуточного реле. При его срабатывании посредством замыкающего контакта 3.2 третьего промежуточного реле включается электромагнит Направление 1 с обмоткой 1, а посредством размыкающего
контакта 3.6 отключается обмотка 5 электромагнита Направление 2. Происходит очередной реверс механизма. При этом отключается датчик 7 крайнего положения
Направление 2, замыкающий контакт 7.2 которого отключает обмотку 2 второго промежуточного реле. При возвращении механизма в исходное положение включается первый датчик 8 исходного положения, раз0 мыкающий контакт 8.1 которого обрывает цепь питания обмотки 3 третьего промежуточного реле, а размыкающий контакт 8.2 - цепь питания обмотки 4 электромагнита Направление 1.
5 При необходимости аварийного отвода
механизма из любого положения в исходное
нажимается кнопка 12 управления Отвод.
При этом подается питание на обмотку 3
третьего промежуточного реле, которое сра0 батывает и через контакт 3.1 становится на самопитание. Его контакты 3.4 и 3.5 разрывают цепи питания соответственно обмотки 1 и 2 первого и второго промежуточных реле. В зависимости от того, где находится
5 механизм, в правом (включен второй датчик 9 исходного положения) или в левом положении (включен первый датчик 8 исходного положения) от исходного положения включается эпектромагниг 4 Направление 1
0 или 5 Направление 2. Осуществляется отвод механизма в исходное положение.
При возвращении механизма включаются первый 8 и второй 9 датчики исходного положения, контакты 8,1 и 9,1 которых от5 ключа ют обмотку 3 третьего промежуточного реле, а контакты 8.2 и 9.2 соответственно обмотки 4 и 5 электромагнитов Направление 1 и Направление 2.
Предлагаемое устройство автоматиче0 ски обеспечивает выбор направления перемещения механизма из любого противоположного положения в исходное. Формула изобретения Устройство управления производствен5 ными механизмами, перемещающимися по замкнутому циклу в двух противоположных направлениях, содержащее первое промежуточное реле с двумя замыкающими контактами, второе промежуточное реле с
0 двумя размыкающими и двумя замыкающими контактами, электромагниты Направление 1 и Направление 2, а также первый датчик исходного и датчик крайнего положения Направление 1 с одним замыкающим
5 контактом, кнопки управления Направление 1 и Направление 2, при этом обмотки промежуточных реле и электромагнитов Направление 1 и Направление 2 одними из выводов подключены к первой шине питания, непосредственно другой вывод обмотки первого промежуточного реле подключен к второй шине питания через последовательно соединенные первый размыкающий контакт второго промежуточного реле, кнопку управления Направление 1, шунтиро- ванную первым замыкающим контактом первого промежуточного реле, а другой вывод обмотки второго промежуточного реле через кнопку управления Направление 2, параллельно которой включены первый за- мыкающий контакт датчика крайнего положения при перемещении в направлении 1 и первый замыкающий контакт второго промежуточного реле, другие выводы обмоток электромагнитов Направление 1 и На- правление 2 подключены к второй шине питания соответственно через последовательно соединенные второй замыкающий контакт первого промежуточного реле и второй размыкающий контакт второго проме- жуточного реле и второй замыкающий контакт второго промежуточного реле, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, устройство дополнено третьим промежуточным реле с тремя замыкающими и тремя размыкающими контактами, вторым датчиком исходного положения с двумя размыкающими контактами, датчиком крайнего положения Направление 2 с двумя замыкающими контактами, третьей кнопкой управления Отвод, третьим замыкающим и двумя размыкающими контактами первого промежуточного реле, третьим замыкающим, третьим и четвертым размы- кающим контактами второго промежуточного реле, вторым размыкающим контактом первого датчика исходного положения, вторым замыкающим контактом датчика крайнего положения Направление 1, при этом один из выводов обмотки третьего промежуточного реле подключен к первой шине питания непосредственно, а другой - через последовательно соединенные первый размыкающий контакт первого датчика ис- ходного положения механизма, шунтированный первым размыкающим контактом второго датчика исходного положения механизма, и кнопку управления Отвод, параллельно которой включен первый замыкающий контакт третьего промежуточного реле и группа из последовательно соединенных первого замыкающего контакта датчика крайнего положения Направление 2 и третьего замыкающего контакта второго промежуточною реле, последовательно с обмоткой первого промежуточного реле включен первый размыкающий контакт третьего промежуточного реле, а параллельно первому размыкающему контакту второго промежуточного реле включен второй замыкающий контакт датчика крайнего положения Направление 1, обмотка второго промежуточного реле последовательно соединена с вторым размыкающим контактом третьего промежуточного реле, шунтированный вторым замыкающим контактом датчика крайнего положения Направления 2, а последовательно с первым замыкающим контактом датчика крайнего положения Направление 1 включен третий замыкающий контакт первого промежуточного реле, параллельно группе из последовательно соединенных второго размыкающего контакта второго промежуточного реле и второго замыкающего контакта первого промежуточного реле в цепи обмотки электромагнита Направление 1 подключены последовательно соединенные второй размыкающий контакт первого датчика исходного положения, первый размыкающий контакт первого промежуточного реле, третий размыкающий контакт второго промежуточного реле и второй замыкающий контакт третьего промежуточного реле, последовательно с вторым замыкающим контактом второго промежуточного реле в цепи обмотки электромагнита Направление 2 включен размыкающий контакт третьего промежуточного реле, параллельно которым подключен последовательно соединенные второй размыкающий контакт второго датчика исходного положения, второй размыкающий контакт первого промежуточного реле, четвертый размыкающий контакт второго промежуточного реле и третий замыкающий контакт третьего промежуточного реле, причем датчики исходного положения включены таким образом, что при перемещении механизма в одном направлении во включенном состоянии находится первый датчик исходного положения, а при перемещении его в другом направлении - второй датчик исходного положения.
Направление I
-Ч
#.ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Устройство для управления земснарядом со свайным ходом | 1988 |
|
SU1601292A1 |
| Устройство для управления исполнительным органом | 1982 |
|
SU1149217A1 |
| Коммутационное устройство | 1982 |
|
SU1073816A1 |
| Устройство аварийного отключения от питающей сети многоопорной дождевальной машины | 1983 |
|
SU1151232A1 |
| Трехфазный коммутатор с защитой от коротких замыканий | 1983 |
|
SU1120420A1 |
| Коммутационное устройство | 1986 |
|
SU1352584A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВИБРОФОРМОВАНИЯ ЯЧЕИСТОБЕТОННОЙ СМЕСИ | 1992 |
|
RU2027589C1 |
| Устройство для управления исполнительными органами печатной машины | 1979 |
|
SU885070A1 |
| Устройство для управления движением кабины подъемника | 1979 |
|
SU1028589A1 |
Использование: в системах управления при управлении производственными механизмами, совершающими последовательные движения по замкнутому циклу. Сущность изобретения, устройство содержит три промежуточных реле 1-3, электромагниты Направление 1 и Направление 2 соответственно с обмоткзми 4 и 5, датчик крайнего положения Направление 1, датчик крайнего положения Направление 2 и два датчика исходного положения, а также кнопки управления 10-12 Направление 1, Направление 2 и Отвод. Особенностью устройства является то, что оно обеспечивает при необходимости аварийного отвода автоматический выбор направления перемещения механизма в исходное из любого положения. 2 ил. /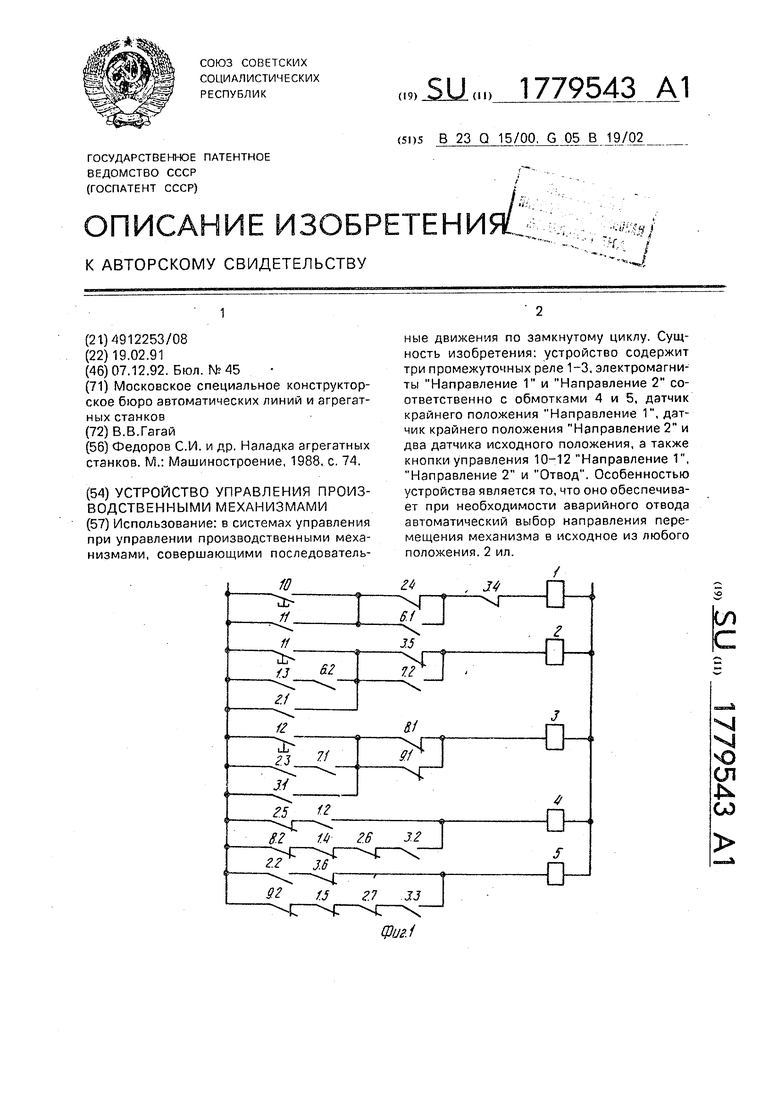
Направление 2 Фиг. г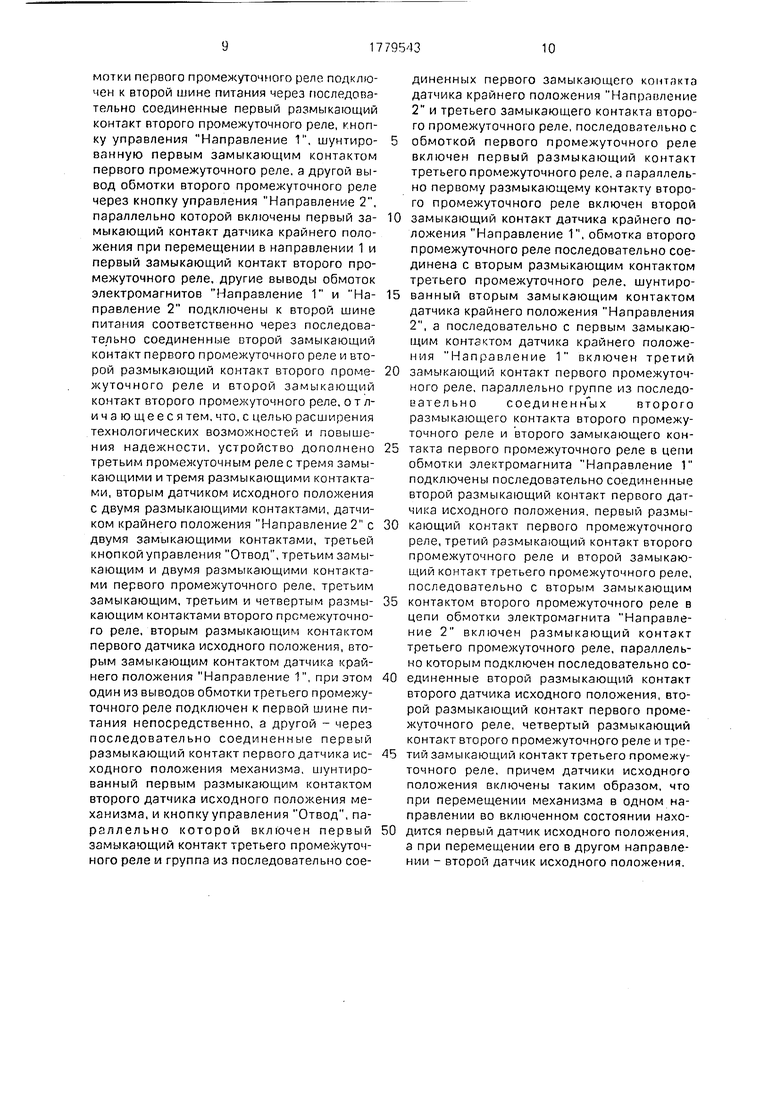
| Федоров С.И | |||
| и др | |||
| Наладка агрегатных станков | |||
| М.: Машиностроение, 1988, с 74. |
