Изобретение относится к электроприводам производственных механизмов, в которьк возможны импульсные перегрузки, например к электроприводам черпаковой цепи земснарядов работающих на каменистых грунтах.
Цель изобретения - повышение быстродействия защиты за счет контроля мгновенного значения момента нагрузки электропривода.Сущность изобретения заключается в том, что величина превьпчения U М момента нагрузки М электропривода над моментом холостого хода Mq измеряется по величине сигнала разности (1„ - 1я), где ifl - ток якоря нагруженного электропривода, if - электропривода, рабо ающе- „° .- РИ -ом сигнал i
, вырабатывается модели электропривода.
с помощью
о
00 00
Если -AM : йМ«,/где максимально допустимая величина превышения текущего момента нагрузки М электропривода над моментом нагрузки холостого хода MO, то управление электроприводом ведется по току возбуждения.
31601688
то вырабатьшается сиг10
30
ГГЛ Йьш няГ апряжения пи- SW цепи ЯКОРЯ ядя прввохраявння электропривода от аварии, где и, игнал, пропорциональньй первой про
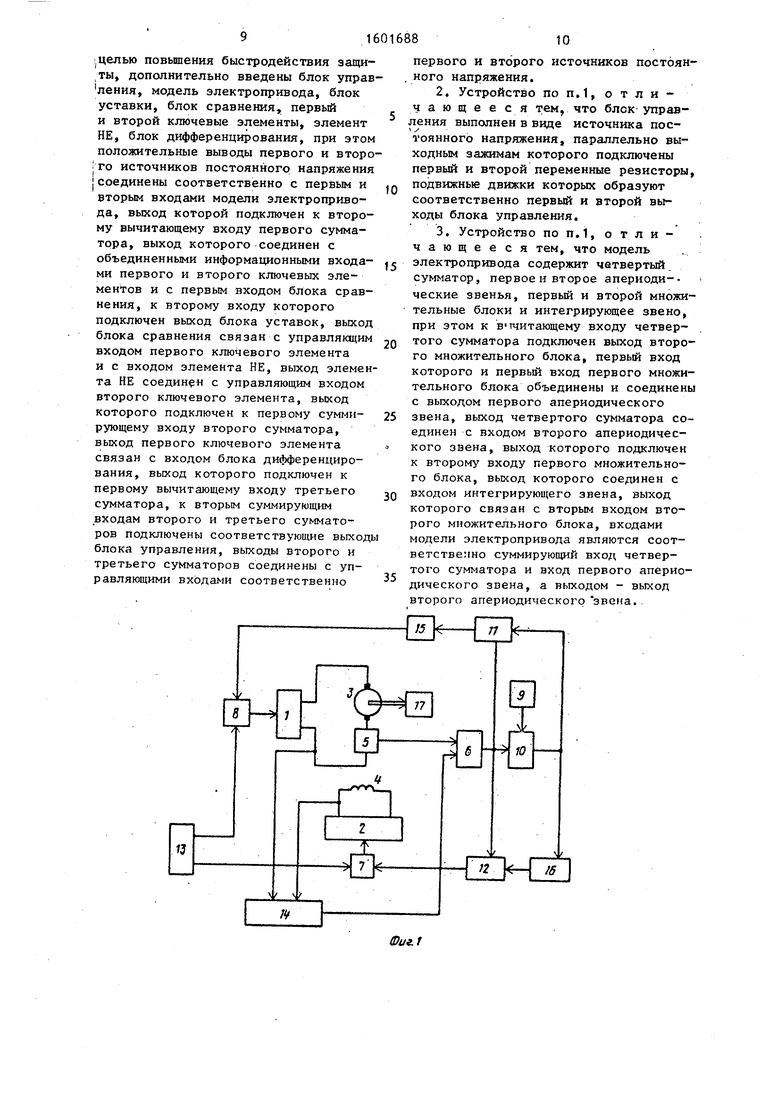
ITtr приведена скема строй- ства , .л тРОПривод-- -Р;„.
pSSLr-if;;. Д; схе„а иоде™
электропривода, на фиг.
Гстр воТфн;.,) содержит „вр.ь« . „ орой 2 управляемые источяики ,5 LcToZoro „Спряжения, ,лектродвига- , т Гпостоянного тока независимого
Го ТозеГеГ1-Г.:. ГГ во ГГ Го Ра/иёния.- rrBrJl i e TrnpH да. блок 15 дифференцирования, элемент нПб при этом первьй и второй выхо-35 пм блока 13 управления соединены со- ГтвеГственно с первьми суммирующими
:Года сумматоров 7 и 8, к второму вь1читающему входу сумматора 8 подклю ченвь1ход блока 15 ди44 еренцирова- н а к второму суммирующему входу : a:opa - вь.од ключевого п,, 17 ВЫХОДЫ сумматоров 7 и со 1пине, с входами управления источников 2 и 1 постоянного напряжения . соответственно,. к выходным зажимам источника 1 напряжения параллельно подГючена цепь из последовательно
ГаТтГкГна Гу- ГоГко о
го соединен выход модели 14 элекгр Тар лельно вьпсоднь. зажимам ис г д„ые зажимы источников 1 и ° ного напряжения соединены оответст енио с первьм и вторым входами мо Ги 14 электропривода, . сумма Sa 6 подключен к инфорнационнь
-ГоГогГ-дкГеП
НЕ кл го ка эл ме
м с
35
45
.- 5
10
30
,5 ,
35
-
г
дта
НЕ 16 соединен с управляющим входом ключевого элемента 12, выход ключевого элемента 11 связан с входом блока 15 дифференцирования, с якорем электродвигателя постоянного тока механически соединена нагрузка 17.
В качестве блока Ю сравнения может использоваться триггер ПЫидта с гистерезисной прямоугольной характеристикой или компаратор.
Управляемые источники 1 и 2 постоянного напряжения могут быть выпол- н-ны в виде источника переменного напряжения, мостового выпрямителя на тиристорах, управляемые электроды которых соединены со схемой импульс- но-фазового упраления (СИФУ), управляющий вход которого подключен к выходу сумматора 8 (7).
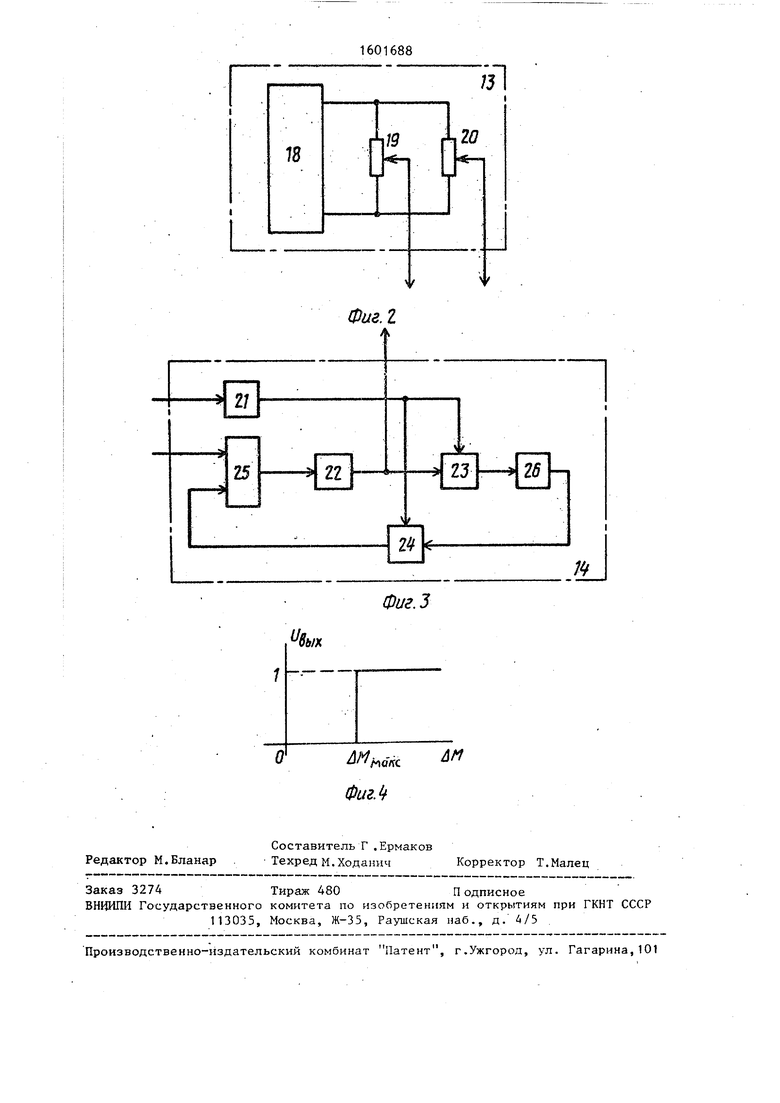
Блок 13 управления (фиг.2) содержит источник 18 постоянного напряжения и два переменных резистора 1У и - 20 которые подключены параллельно выходным зажимам источника 18. По- движные отводы резисторов 19 и /и соединены соответственно с первым и вторьп. вькодами блока 13 управления.
Модель 14 электропривода (.фиг. содержит два апериодических звена 21 и 22 первого порядка, два множительных блока (блоков перемножения) 23 и 24, сумматор 25, интегрирующее звено 26, при этом выход апериодичес-. кого звена 21 соединен с первыми входами множительных блоков 23 и г , к второму входу множительного блока 23 подключен выход апериодического звена 22, а выход - с входом интегрирующего звена 26, выход которого связан с вторьп. входом множительного блока 24, вькод которого подключен к вьиитающему входу сумматора 25, а выход сумматора 25 соединен с входом апериодического звена 22, первым и BTopbD. входами модели 14 электропривода являются соответственно суммирующий вход сумматора 23 и вход апериодического звена 21, а вы ходом - выход апериодического зве Передаточная функция апериодического звена 21 имеет вид
35
45
.- 50
5 где
W,,,(S) К, Кя/(1 Т
,S), (1)
статический коэффициент передачи цепи ьозбуждения электропривода при его работе на холо стом ходу;
постоянная времени цепи возбуждения электропривода при его работе на холостом ходу.
160
Передаточная функция апериодического звена 22 имеет вид ,
W.,(S) (.1 -н ).
(2)
К,
Т
соответственно статический коэффициент передачи и постоянная времени якорной цепи электропривода при его работе на холостом ходу.
Передаточная функция интегрирующезвена 26 имеет вид
W
гв
(S) I/IS,
(3)
где I - момент инерции электропривода при его работе на холостом ходу.
Устройство (фиг.1) работает следующим образом,
В блоке 13 управления (фиг.2) с помощью потенциометров переменных резисторов 19 и 20, подключенных параллельно источнику 18 постоянного напряжения, устанавливают соответственно напряжения U, , U величина которьк определяется номинальным режимом работы электропривода. Сигнал и, подается на суммирующий вход сумматора 8, на вычитающий вход которого подается сигнал U j с-выхода блока 15 дисЪференцироваиия (если нагрузка электропривода не превышает допустимые значения, то Uj,j 0). Выходной сигнал сумматора 8 Ug (U,,, - Ujg) подается на управляющий вход регулируемого источника 2 постоянного напряжения (на вход управления СИФУ, если источник 1 имеет указанную те хническую реализацию). Сигнал U обуславливает, величину выходного апряжения источника 1, равную U оторое прикладывается к цепи, содеращей последовательно соединенные бмотку 3 якоря и датчик 5 .тока.
Аналогично сигнал U . с второго выхода блока 13 управления подается на суммирующий вход сумматора 7, на второй вход которого через ключевой элемент 12 подается сигнал Ug йН с выхода сумматора 6. Выходной сигнал сумматора 7 U подается на управляющий вход регулируемого источника 2 постоянного напряженияг
з1601688
Сигнал и устанавливает величину выходного напряжения источника 2, равной Ug, которое приложено к обмотке 4 возбуждения.
При этом якорь электродвигателя начинает вращаться и развивать момент, определяемый нагрузкой 17.
Одновременно напряжение U подает- Q ся на первый вход модели 14 электропривода, а напряжение и - на втор ой вход модели 14 электропривода. Модель 14 электропривода воспроизводит статические и динамические характеристи- ,5 ки электродвигатачя постоянного тока с независимым возбуждением с приводным механизмом без учета момента , сопротивления, вызванного нагрузкой
17 на приводной механизм и на вал 20 электродвигателя.
В модели электропривода напряжение и подается на суммирующий вход сумматора 25, на вычитающий вход которого подается сигнал еL с выхода 25 блока 24 перемножения. При этом
сигнал Ва пропорционален ЭДС моделируемого электродвигателя. Выходной сигнал сумматора 25 Jy (U - - е), где K,,j- статический коэффи- 2Q циент сумматора 25 (в частном случае 25 ) подается на вход апериодического знена 22 с передаточной функцией W.2/S), моделирующего якорную цепь 3 электродвигателя. Апериодическое звено 22 преобразует сиг- 35 нал UjjB сигнал i, пропорциональный току якоря i электродвигателя.
Сигнал ij, с выхода апериодического звена 22 поступает на второй вход множительного блока 23 (блока перемножения) и на вычитающий вход сумматора 6.
В модели 14 напряжение Ug подается на вход апериодического звена 21 с передаточной функцией VI(S), моделирующего передаточную функцию цепи возбуждения электродвигателя. Выходной сигнал апериодического звена 21 г, KB РВ пропорционален потоку возбуждения электродвигателя. Данный сигнал подается на первые входы
45
50
множительных блоков 23 и 24.
Множительный блок 23 формирует сигнал, пропорциональный электромеха- 55 ническому моменту М электродвигателя
, который равен произведению сиг -- -Л J- t налов (Kj,p g) и (i) с вькодов апериодических звеньев 21 и 22 соответственно.
1601688
Выходной сигнал множительного блока 23 U,jjE М: поступает на вход интегрирукнцего звена 26 с передаточной функцией WjgCS) , моделирующей приВеденньй .момент инерции электродвигателя и нагрузки В. Интегрирующее звено 26 формирует выходной сигнал U,g(D , пропорциональный частоте вращения электродвигателя. Указанньй сигнал Q с выхода интегрирующего звена 26 подается на второй вход множительного блока 24. В результате перемножения сигналов, поступающих на входы множительного блока 24, соответственно Kg(pg и 03 ,на его выходе формируется сигнал е.
На суммирующий вход сумматора 6 с выхода датчика 5 тока подается
.. хгоДЛ.-/,- Hi - - , сигнал ij,, пропорциональный току якоря нагруженного электродвигателя,, Сумматор 6 формирует разностный сигнал Ug5 М М - М, пропорциональный моменту сопротивления (моменту нагрузки) электродвигателя.
При изменении нагрузки 17 или при изменении значений U, Ug, что .имеет место в автономных энергосистемах, изменяется сигнал i, снимаемый датчиком 5 тока, что .приводит к изменению выходного сигнала сумматора 6.
Выходной сигнал сумматора 6 , iM подается на информационные ходы ключевых элементов 11 и 12 и на первый вход блока 10 сравнения, имеющего выходную характеристику (ФИГ..4) . На второй вход блока 10 сравнения с выхода блока,9 установки подается сигнал U ЬМ„, где ЬМ - максимально допустимое значение вели- чины/ М. ЕслийМ сйМ. то вькодной сигнал блока 10 сравнения равен логи ческому О (фиг.4). При этом сиг- „ал на управляющем входе ключевого элемента 11 равен логическому О . ПОЭТОМУ ключевой элемент 1 закрыт Сигнал на входе элемента НЕ 16 также логическому О, поэтому вы- хГной сигнал элемента НЕ 16 равен
П-а :сГ:Г Рав аП о --Ги:с : г- -
суммирующий вход , няя выходное напряжение соответ ствии с изменением величины AM..
8
При ДМ М на выходе блока Ю
25
о
сравнения появляется сигнал логической 1 (фиг.4), которая подается на управляющий вход ключевого элемента 11 и на вход элемента НЕ 16. Выходной сигнал элемента становится равным логическому О. При этом открьшается ключевой элемент 11 и закрьтается ключевой элемент 1.. Сигнал и ДМ / М через открытый ключевой элемент 11 подается на вход блока 15 дифференцирования, вьрсодной сигнал которого Uga К,5-(Ш) , где К, - некоторьхй коэффициент, подается на вычитающий вход сумматора 8,
уменьшая его выходной сигнал Ug, а следовательно, и величину U.
При ЛМ йМп-, к обмотке 4 возбуждения приложено напряжение Un, а к обмотке якоря -- напряжение U .U , которое может быть равно нулю.
В результате применения.предлагаемого устройства повышается надежность работы за счет исключения режима работы с моментом нагрузки, превышавдим максимально допустимое значение. Использование модели электропривода позволяет в реальном масштабе време-. ни определять текущее , а не среднее, значение момента нагрузки, что повышает достоверность работы устройст- ва. Использование для защиты сигна-. ла ЛМ ,, пропорционального производной от значения текущего момента, повышает быстродействие электропривода, что особенно важно в многодви гательных электроприводах,применяемых в земснарядах, на сменах и т.д.
30
35
40
Формул
3 обретения
5
1, Устройство для защиты электропривода постоянного тока от перегрузки, содержащее первый источник постоянного тока, отрицательный вывод которого имеет клемму для подключения к первому выводу обмотки якоря, а положз тельный вывод соединен с первым выводом датчика тока цепи якоря, второй вывод которого имеет клемму для подключения к второму выводу обмотки якоря, выход датчика тока цепи якоря соединен с суммирующим, входом первого сумматора, вторйи 55 источник постоянного тока имеет
клеммы для подключения к обмотке возбуждения, ВТОРОЙ и третий сумматоры, отличающееся тем, что, с
0
целью повышения быстродействия эащи- ,ты, дополнительно введены блок управ- ления, модель электропривода, блок уставки, блок сравнения, первый и второй ключевые элементы, элемент НЕ, блок дифференцирования, при этом положительные выводы первого и второ- гго источников постоянного напряжения I соединены соответственно с первым и вторым входами модели электропривода, выход которой подключен к второму вычитающему входу первого сумматора, выход которого соединен с объединенными информационными входами первого и второго ключевых элементов и с первым входом блока сравнения, к второму входу которого подключен выход блока уставок, выход блока сравнения связан с управлякщим входом первого ключевого элемента и с входом элемента НЕ, вьпсод элемента НЕ соединен с управляющим входом второго ключевого элемента, выход которого подключен к первому суммирующему входу второго сумматора, выход первого ключевого элемента связан с входом блока дифференцирования, выход которого подключен к первому вычитающему входу третьего сумматора, к вторым суммирующим входам второго и третьего сумматоров подключены соответствующие выходы блока управления, выходы второго и третьего сумматоров соединены с управляющими входами соответственно
o
5
0
5
0
5
первого и второго источников постоян- . ного напряжения.
2.Устройство по п,1, отличающееся тем, что блок управл ения выполнен в виде источника постоянного напряжения, параллельно выходным зажимам которого подключены первый и второй переменные резисторы, подвижные движки которых образуют соответственно первый и второй выходы блока управления.
3,Устройство по п.1,отличающееся тем, что модель электропривода содержит четвертый сумматор, первое и второе апериоди-- ческие звенья, первый и второй множительные блоки и интегрирующее звено, при этом к в тчитающему входу четвертого сумматора подключен выход второго множительного блока, первый вход которого и первый вход первого множительного блока объединены и соединены с выходом первого апериодического звена, выход четвертого сумматора соединен с входом второго апериодического звена, выход которого подключен
к второму входу первого множительного блока, выход которого соединен с входом интегрирующего звена, выход которого связан с вторым входом второго множительного блока, входами модели электропривода являются соответственно суммирующий вход четвертого сумматора и вход первого апериодического звена, а выходом - выход второго апериодического звена. .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1246285A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| АНАЛОГО-ЦИФРОВОЙ ДАТЧИК НУЛЕВОГО ТОКА | 2011 |
|
RU2460134C1 |
| Способ демпфирования колебаний синхронного двигателя преобразовательного агрегата | 1989 |
|
SU1624658A2 |
Изобретение относится к электротехнике и предназначено для исключения аварийного режима работы с моментом нагрузки, превышающим максимально допустимое значение. Цель изобретения - повышение быстродействия защиты. Величина превышения Δ М момента нагрузки М электропривода над моментом холостого хода Мо измеряется по величине сигнала разности Iя-Iя тока якоря Iя нагруженого электропривода и тока якоря Iя электропривода, работающего на холостом ходу. При этом сигнал Iя вырабатывается при помощи модели электропривода. Если Δ М меньше максимально допустимой величины, то управление электроприводом ведется по току возбуждения. Если Δ М равно максимально допустимой величине, то вырабатывается сигнал U1 на уменьшение напряжения питания цепи якоря для предохранения электропривода от аварии, где U1 - сигнал, пропорциональный первой производной Δ М. 4 ил.
Фиг.г
/.o/vc
Фиг.
Фиг. 3
AM
