/ 2
Ш 8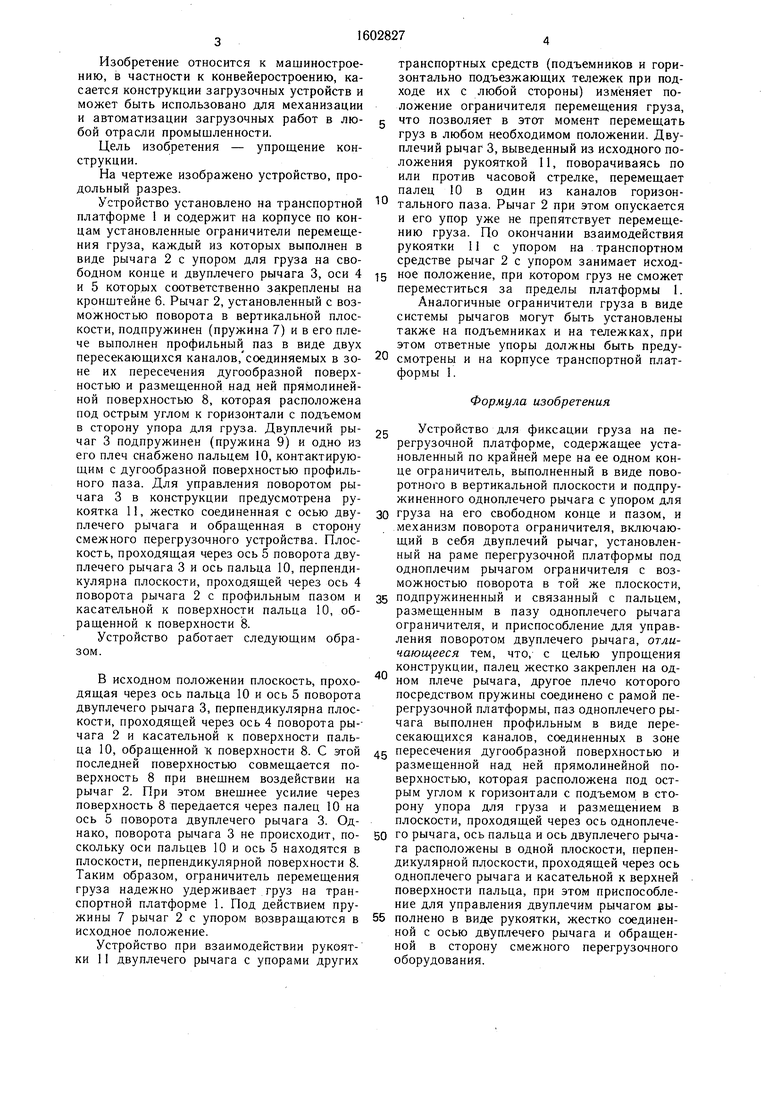
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи штучных грузов | 1988 |
|
SU1602829A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| Грузозахватное устройство | 1990 |
|
SU1710484A1 |
| Телескопический грузозахват | 1986 |
|
SU1384482A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
| Шаговый подъемник | 1985 |
|
SU1364603A1 |
| РУЧНОЙ ЗАЖИМАЮЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2011 |
|
RU2479411C1 |
Изобретение относится к машиностроению, в частности к конвейеростроению, касается конструкции загрузочных устройств и может быть использовано для механизации и автоматизации загрузочных работ в любой отрасли промышленности. Цель изобретения - упрощение конструкции. Устройство состоит из транспортной платформы 1, по концам которой на корпусе установлены ограничители перемещения груза, выполненные в виде двух подпружиненных рычагов 2 и 3. Рычаг 2 имеет упор и в его плече выполнен профильный паз в виде двух пересекающихся каналов, соединенных в зоне их пересечения дугообразной поверхностью и размещенной над ней прямолинейной поверхностью 8, которая расположена под острым углом к горизонтали с подъемом в сторону упора для груза. Одно из плеч рычага 3 имеет палец 10, взаимодействующий с профильным пазом, а другое подпружинено пружиной 9. Для управления поворотом рычага 3 в конструкции предусмотрена рукоятка 11, обращенная в сторону смежного перегрузочного устройства. 1 ил.
О5 О
го
с to |
Изобретение относится к машиностроению, в частности к конвейеростроению, касается конструкции загрузочных устройств и может быть использовано для механизации и автоматизации загрузочных работ в любой отрасли промышленности.
Цель изобретения - упрощение конструкции.
На чертеже изображено устройство, продольный разрез.
транспортных средств (подъемников и горизонтально подъезжающих тележек при подходе их с любой стороны) изменяет положение ограничителя перемещения груза, 5 что позволяет в этот момент перемещать груз в любом необходимом положении. Двуплечий рычаг 3, выведенный из исходного положения рукояткой 11, поворачиваясь по или против часовой стрелке, перемещает палец 10 в один из каналов горизонУстройство установлено на транспортной10 тального паза. Рычаг 2 при этом опускается
платформе 1 и содержит на корпусе по кон-и его упор уже не препятствует перемещецам установленные ограничители перемеще- ния груза, каждый из которых выполнен в
виде рычага 2 с упором для груза на свонию груза. По окончании взаимодействия рукоятки 11 с упором на транспортном средстве рычаг 2 с упором занимает исходбодном конце и двуплечего рычага 3, оси 4 5 о положение, при котором груз не сможет и 5 которых соответственно закреплены на переместиться за пределы платформы 1. кронштейне 6. Рычаг 2, установленный с возможностью поворота в вертикальной плоскости, подпружинен (пружина 7) и в его плече выполнен профильный паз в виде двух пересекающихся каналов, соединяемых в зоне их пересечения дугообразной поверхностью и размещенной над ней прямолинейной поверхностью 8, которая расположена под острым углом к горизонтали с подъемом в сторону упора для груза. Двуплечий ры- jc
20
Аналогичные ограничители груза в виде системы рычагов могут быть установлены также на подъемниках и на тележках, при этом ответные упоры должны быть предусмотрены и на корпусе транспортной платформы 1.
Формула изобретения
чаг 3 подпружинен (пружина 9) и одно из его плеч снабжено пальцем 10, контактирующим с дугообразной поверхностью профильного паза. Для управления поворотом рычага 3 в конструкции предусмотрена руУстройство для фиксации груза на перегрузочной платформе, содержащее установленный по крайней мере на ее одном конце ограничитель, выполненный в виде поворотного в вертикальной плоскости и подпружиненного одноплечего рычага с упором для
коятка 11, жестко соединенная с осью дву- зо груза на его свободном конце и пазом, и
плечего рычага и обращенная в сторону смежного перегрузочного устройства. Плоскость, проходящая через ось 5 поворота двуплечего рычага 3 и ось пальца 10, перпендикулярна плоскости, проходящей через ось 4
механизм поворота ограничителя, включающий в себя двуплечий рычаг, установленный на раме перегрузочной платформы под одноплечим рычагом ограничителя с возможностью поворота в той же плоскости.
поворота рычага 2 с профильным пазом и 35 подпружиненный и связанный с пальцем.
касательной к поверхности пальца 10, обращенной к поверхности 8.
Устройство работает следующим образом.
В исходном положении плоскость, проходящая через ось пальца 10 и ось 5 поворота двуплечего рычага 3, перпендикулярна плоскости, проходящей через ось 4 поворота ры-- чага 2 и касательной к поверхности пальразмещенным в пазу одноплечего рычага ограничителя, и приспособление для управления поворотом двуплечего рычага, отличающееся тем, что, с целью упрощения конструкции, палец жестко закреплен на одном плече рычага, другое плечо которого посредством пружины соединено с рамой перегрузочной платформы, паз одноплечего рычага выполнен профильным в виде пересекающихся каналов, соединенных в зоне
ца 10, обращенной к поверхности 8. С этой 45 пересечения дугообразной поверхностью и
последней поверхностью совмещается поверхность 8 при внешнем воздействии на рычаг 2. При этом внешнее усилие через поверхность 8 передается через палец 10 на ось 5 поворота двуплечего рычага 3. Одразмещеннои над ней прямолинейной поверхностью, которая расположена под острым углом к горизонтали с подъемом в сторону упора для груза и размещением в плоскости, проходящей через ось одноплеченако, поворота рычага 3 не происходит, по- 50 го рычага, ось пальца и ось двуплечего рыча- скольку оси пальцев 10 и ось 5 находятся вга расположены в одной плоскости, перпенплоскости, перпендикулярной поверхности 8.дикулярной плоскости, проходящей через ось
Таким образом, ограничитель перемещенияодноплечего рычага и касательной к верхней
груза надежно удерживает груз на тран-поверхности пальца, при этом приспособлеспортной платформе 1. Под действием пру-ние для управления двуплечим рычагом выжины 7 рычаг 2 с упором возвращаются в 55 полнено в виде рукоятки, жестко соединен- исходное положение.ной с осью двуплечего рычага и обращенУстройство при взаимодействии рукоят-ной в сторону смежного перегрузочного
ки 11 двуплечего рычага с упорами другихоборудования.
транспортных средств (подъемников и горизонтально подъезжающих тележек при подходе их с любой стороны) изменяет положение ограничителя перемещения груза, что позволяет в этот момент перемещать груз в любом необходимом положении. Двуплечий рычаг 3, выведенный из исходного положения рукояткой 11, поворачиваясь по или против часовой стрелке, перемещает палец 10 в один из каналов горизонтального паза. Рычаг 2 при этом опускается
о положение, при котором груз не сможет переместиться за пределы платформы 1.
Аналогичные ограничители груза в виде системы рычагов могут быть установлены также на подъемниках и на тележках, при этом ответные упоры должны быть предусмотрены и на корпусе транспортной платформы 1.
Формула изобретения
о положение, при котором груз не сможет переместиться за пределы платформы 1.
Устройство для фиксации груза на перегрузочной платформе, содержащее установленный по крайней мере на ее одном конце ограничитель, выполненный в виде поворотного в вертикальной плоскости и подпружиненного одноплечего рычага с упором для
груза на его свободном конце и пазом, и
механизм поворота ограничителя, включающий в себя двуплечий рычаг, установленный на раме перегрузочной платформы под одноплечим рычагом ограничителя с возможностью поворота в той же плоскости.
подпружиненный и связанный с пальцем.
размещенным в пазу одноплечего рычага ограничителя, и приспособление для управления поворотом двуплечего рычага, отличающееся тем, что, с целью упрощения конструкции, палец жестко закреплен на одном плече рычага, другое плечо которого посредством пружины соединено с рамой перегрузочной платформы, паз одноплечего рычага выполнен профильным в виде пересекающихся каналов, соединенных в зоне
5 пересечения дугообразной поверхностью и
| Устройство для передачи штучных грузов | 1984 |
|
SU1199725A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Трансробот рельсовый ТР-0,5, проект ВИАС № 0866008, изготовлен в 1987. | |||
