tf
7 25
оо 00
4
Изобретение относится к машино строению, в частности к телескопическим грузозахватам подъемников, и может найти применение при транспортировании и складировании грузов в таре.
Цель изобретения - повьшение точности позиционирования.
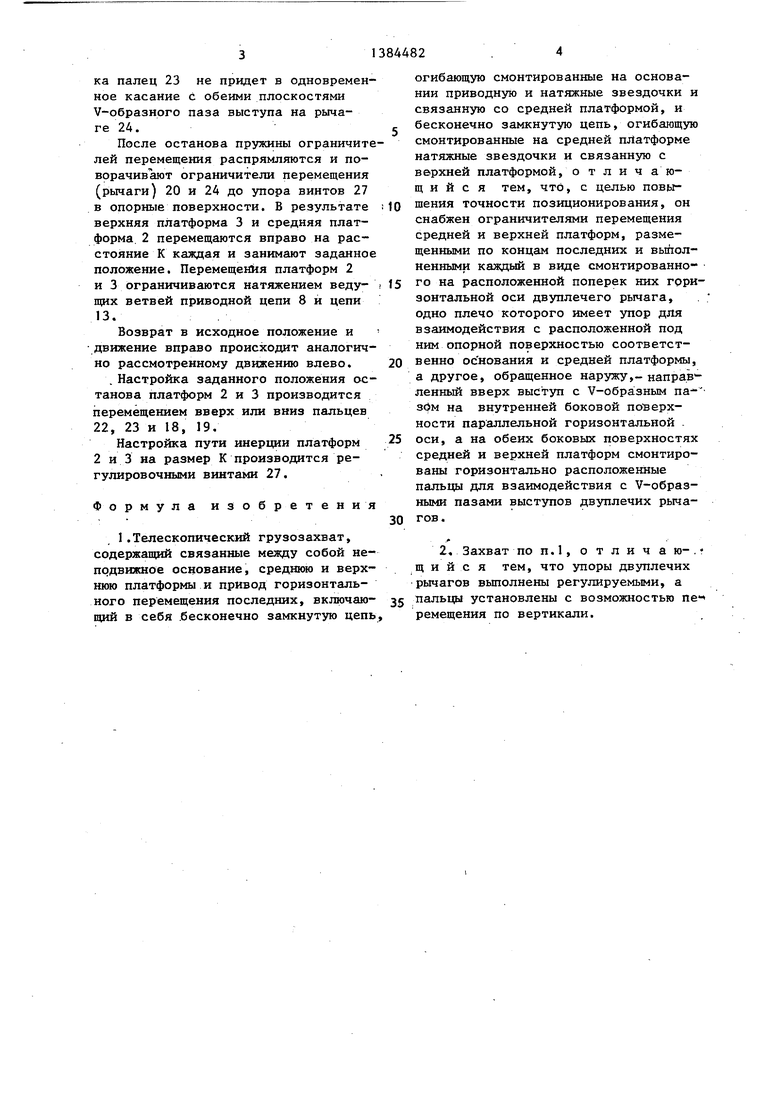
На фиг.1 изображен грузозахват, общий вид; на фиг.2 - узел I на фиг.1; на фиг.3 - вид А на фиг.2.
Грузозахват содержит установленные с возможностью плоскопараллельного перемещения друг относительно друга основание 1, среднюю 2 и верхнюю 3 платформы. Основание 1 смонтировано, на каркасе 4, Внутри каркаса 4 установлен привод вращения ведущей звездочки 5, а на основании 1 смонтированы натяжные ролики (звездочки) б и 7, охваченные цепью 8.
На средней платформе 2 имеются выступы 9 и 10 с пазами, установленные на расстоянии, кратном шагу при- водной цепи 8, и входящие в зацепление с упомянутой цепью. На средней платфо.рме 2 установлены ролики (звездочки) 11 и 12, между которыми натянута цепь 13, входящая в зацепление с выступами 14 и 15, имеющимися на основании 1. и установленными на расстоянии, кратном щагу цепи 13, а также с выступами 16 и 17 верхней платформы 3, расстояние между которыми также кратно щагу цепи 13.
На рерхней платформе 3 на ее боковых поверхностях установлены с возможностью регулирования в вертикальной плоскости пальцы 18 и 19 (по одному с каждой из боковых сторон), взаимодействующие в одном из крайних положений с ограничителями 20 и 21 перемещения, установленными на средней платформе 2.
Аналогично на средней платформе 2 установлены пальцы 22 и 23, взаимо действующие в одном из крайних положений с ограничителями 24 и 25 перемещения. Каждьш из ограничителей 20, 21, 24 и 25 выполнен в виде: двуплечего рычага.. Рычаг ограничителя 20 (фиг.2) закреплен на. оси 26. Одно плечо рычага снабжено регулируемым упором в виде винта 27, а другое, обращенное наружу, подпружинено через плунжер 28 пружиной 29, расположенной в корпусе 30 и поджатой винтовой пробкой 31. Это же Плечо рычага имеет выступ с V-образным пазом, в который входит в крайнем положении палец. 23.
Телескопический грузозахват работает следующим образом.
При включении привода и передаче вращения ведущей звездочке 5 против часовой стрелки приводная цепь 8 посредством выступов 9 и 10 переда- ет движение влево средней платформе 2. При перемещении средней платформы влево звездочка (ролик) 11 перематьшает верхнюю ветвь цепи 13,
так как нижняя часть цепи 13 зафиксирована выступами 14 и 15, имеющимися на неподвижном основании 1. При этом верхняя платформа 3 цепью
13посредством выступов 16 и 17 пе- ремещается влево. При выходе из зацепления с роликами цепей 8 и 13 выступов 10,15 и 16 движение осуществляется посредством выступов 9,
14и 17. В момент движения,,преодоле- вая сопротивление, левая ветвь цепи
9 и верхняя ветвь цепи 13, будучи ведущими, натягиваются, а правая ветвь цепи 8 и нижняя ветвь цепи 13 освобождаются.
В конце движения платформы по команде путевого выключателя (не по- казан) электродвигатель и электромагнит тормоза выключаются, тормоз срабатьгоает, но верхняя платформа 3
с грузом 32 и средняя платформа 2 перемещаются влево по инерции, выбирая люфт-в ведомых ветвях цепей 8 и 13 и освобождая натяжение ведущих ветвей в цепях 8 и 13. Перемещаясь
по инерции, верхняя платформа 3 установленным на ней пальцем 19, взаимодействуя с наклонной плос- костью-V-образного паза ограничителя 20, поворачивает его вокруг оси
26, преодолевая сопротивление пружи- ны 29 через плунжер 28. Перемещение продолжается до тех пор, пока палец 19 не придет в одновременное касание с обеими плоскостями V-образного паза. С этого момента выступ рычага с у-образным пазом начинает работать как жесткий упор и через ось 26 передает непогащенную энергию инерции груза 32 средней платформе. Средняя
платформа 2, продолжая перемещаться влево, установленным на ней пальцем .
23поворачивает рычаг ограничителя
24перемещения. Перемещение средней платформы происходит до тех пор, пока палец 23 не придет в одновременное касание с обеими плоскостями V-образного паза выступа на рычаге 24.
После останова пружины ограничителей перемещения распрямляются и поворачивают ограничители перемещения (рычаги) 20 и 24 до упора винтов 27 в опорные поверхности. В результате верхняя платформа 3 и средняя платформа 2 перемещаются вправо на расстояние К каждая и занимают заданное положение. Перемещения платформ 2 и 3 ограничиваются натяжением веду- щих ветвей приводной цепи 8 и цепи 13.
Возврат в исходное положение и движение вправо происходит аналогично рассмотренному движению влево.
. Настройка заданного положения останова платформ 2 и 3 производится перемещением вверх или вниз пальцев 22, 23 и 18, 19.
Настройка пути инерции платформ 2 и 3 на размер К производится регулировочными винтами 27.
Формула изобретения
1.Телескопический грузозахват, содержапщй связанные между собой неподвижное основание, среднюю и верхнюю платформы и привод горизонтального перемещения последних, включаю- щий в себя .бесконечно замкнутую цепь
огибающую смонтированные на основании приводную и натяжные звездочки и связанную со средней платформой, и бесконечно замкнутую цепь, огибающую смонтированные на средней платформе натяжные звездочки и связанную с верхней платформой, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен ограничителями перемещения средней и верхней платформ, размещенными по концам последних и выполненными каждый в виде смонтированного на расположенной поперек них горизонтальной оси двуплечего рычага, одно плечо которого имеет упор для взаимодействия с расположенной под ним опорной поверхностью соответственно ос нования и средней платформы, а другое, обращенное наружу,- направленный вверх выступ с V-образным па30м на внутренней боковой поверхности параллельной горизонтальной . оси, а на обеих боковых поверхностях средней и верхней платформ смонтированы горизонтально расположенные пальцы для взаимодействия с V-образ- ными пазами выступов двуплечих рычагов.
,
2, Захват по п.1, о т ли ч аю-. щ и и с я тем, что упоры двуплечих рычагов выполнены регулируемыми, а пальцы установлены с возможностью пе ремещения по вертикали.
ем
го
м
го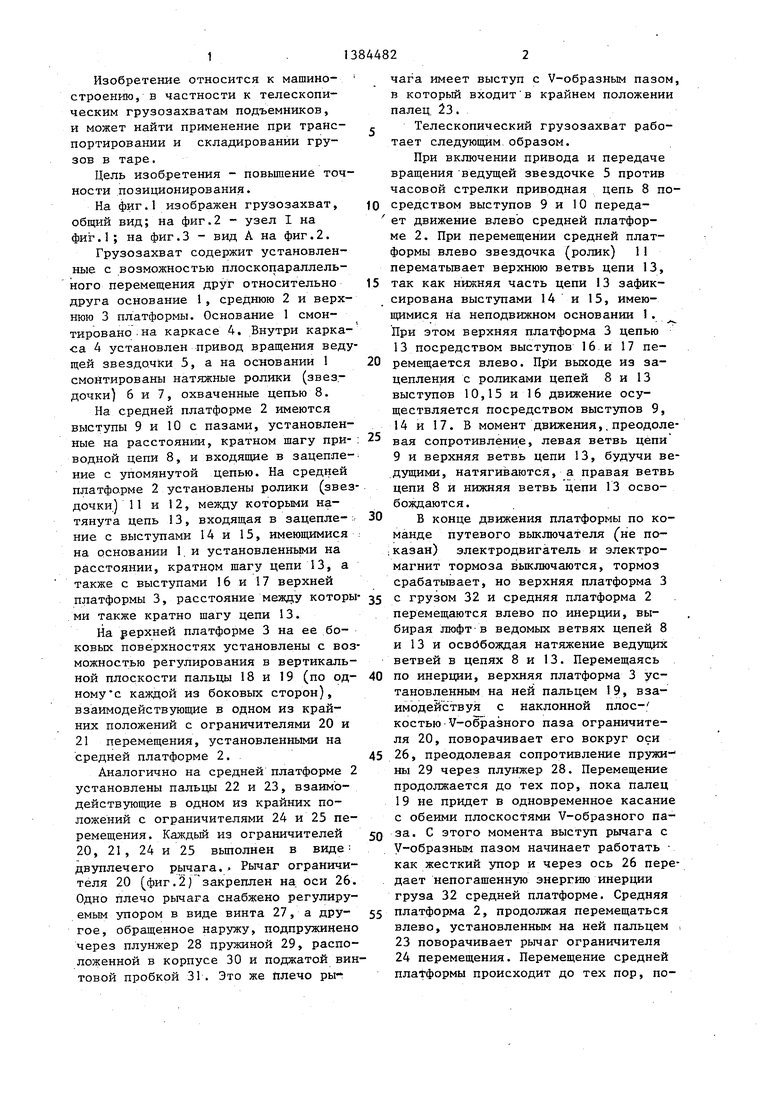
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический грузозахват | 1988 |
|
SU1646951A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Внутренний холодильник для отливок | 1989 |
|
SU1766610A1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| Приспособление к швейным машинам для подачи сшиваемых изделий | 1940 |
|
SU68268A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Приспособление к швейным машинам для подачи сшиваемых изделий к игле | 1940 |
|
SU62753A1 |
| Вертикально замкнутый тележечный конвейер | 1985 |
|
SU1244043A1 |
| Прививочное устройство | 1978 |
|
SU843850A1 |
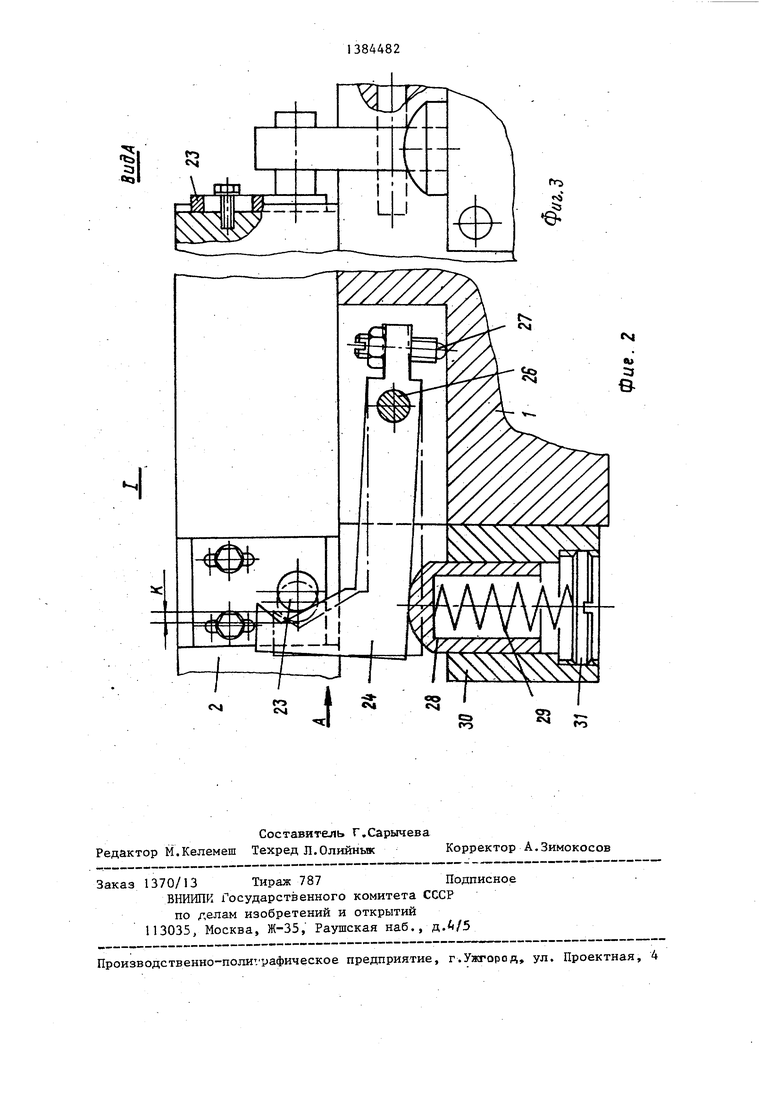
Изобретение относится к машиностроению и может найти применение при транспортировании и складировании грузов в таре. Цель изобретения - повьппение точности позиционирования. Грузозахват содержит установленные с возможностью плоскопараллельного перемещения друг относительно друга основание 1, среднюю платформу 2 и верхнюю платформу 3. Связанная с приводом ведущая звездочка 5 и натяжные звездочки 6 и 7 охвачены цепью 8, которая входит во взаимодействие с элементами зацепления 9 и 10 средней платформы 2. На средней платформе установлены звездочки 11 и 12, между которыми натянута цепь 13, входящая в зацепление с выступами 14 и 15 основания и выступами 17 и 16 верхней платформы. На верхней :платформе: 3 установлены пальцы 18 и 19, взаимодействующие в одном из крайних положений с ограничителями перемещения 20 и 21 средней платформы. На средней платформе 2 установлены пальцы 22 и 23, взаимодействующие в одном из крайних поло-. жений с ограничителями перемещения 24 и 25. Наличие подпружиненных ограничителей перемещения 20, 21, 24 и 25 позволяет повысить точность позиционирования. 1 з.п. ф-лы, 3 ил., (Л I
| Грузозахват телескопический | 1975 |
|
SU536099A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Грузозахват телескопический | 1978 |
|
SU910498A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
