Изобретение относится к станкостроению, в частности к средствам механизации и автоматизации, может быть использовано в роботизированных комплексах и автоматических линиях, например, щтамповки, а также для загрузки и выгрузки заготовок и является усовершенствованием робота по авт. св. № И55334о
Цель изобретения - расширение технологических возможностей за счет обслуживания многопрзиционного технологического оборудования с малым расстоянием между его рабочими позициями .
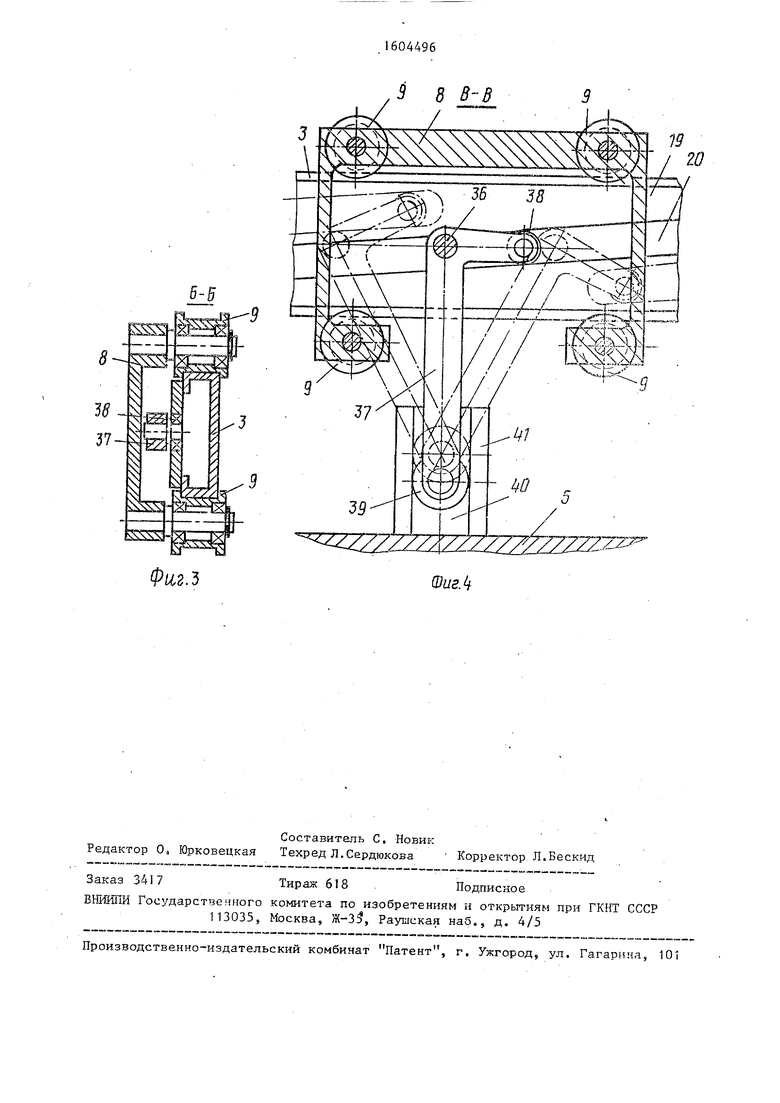
На фиго показан промышленный робот, обрщй вид; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - разрез Б-Б на фиго1; на фиг„ 4 - разрез В-В на фиг.2.
Промьшшенный робот, содержит руки 1 ...с захватными органами 2,закрепленными на траверсе 3, которая размещена в направляюш 1Х 4, установленных на станине 5, и привод 6 с системой управления Гне показан). Кроме того, Промьшшенный робот содержит дополнительно руки 7 с захватными органами 2о Руки 7 закреплены на каретке 8, которая установлена на траверсе 3
с возможностью возвратно-поступательного перемещения с помощью роликов 9 Направляющие 4 вкдючают в себ.я верхние 10 и нижние И рычаги, которые связаны между собой пружинами 12 и установлены на подшипниках кронштейнов 13„ На концах рычагов 10 и П. на подшипниках установлены ролики 14, между которыми размещена траверса 3. Нижние рычаги 11, выполненные двуплечими, связаш 1 с пневмоцилиндром 15 вертикального перемещения тягой 16, а между собой - тягой 17. 1;яги 16 и 17 снабжены элементами 18 для регулировки положения траверсы 3
0
5
0
5
0
45
50
55
относительно станины 5 Траверса 3 имеет Т-образный паз для установки необходимого количества рук 1 с захватными органами 2 в любой ее точке, а также копир 19, имеющ11Й наклонный паз 20о Траверса 3 соединена через шатун 21 с ползуном 22, закрепленным на кривошипе 23 привода 6. Регулировка положения ползуна 22 на кривошипе 23 обеспечивается винтом 24. Кривошип 23 жестко соединен с валом 25, на котором жестко установлена шестер-. ня 26, входящая в зацепление со шток- рейкой 27 пневмоцилиндра 28 горизонтального перемещения Пневмоцилиндр 28 закреплен на корпусе 29, в котором на подимпниках установлен вал 25. Пневмоцилиндр 28 горизонтального перемещения выполнен в виде позиционера с промежуточной точкой, которая обеспечивается дополнительным штоком 30, имеющим ход почти наполовину меньший хода шток-рейки 27с Пневмоцилиндр 28 включает в себя рабочие полости 31-34, а Пневмоцилиндр 5 вертикального перемещения является односторонним и имеет возвратную пружину 35 В каретке 8 на подшипниках установлена ось 36, жестко соединенная с двуплечим рычагом 37, установленным в нише каретки 8, на концах двуплечего рычага 37 установлены ползуны 38 и 39, выполненные в виде роликов ( подшипников) , при этом ползун 38 образует ки- - нематическую пару с наклонным пазом 20 копира 19, а ползун 39 - с вертикальным пазом 40, выполненным на кронштейне 41 станины 5 (тое на самой станине).
Промьш1лённый робот работает следующим образом.
Перед началом рабочего цикла тра- .версу 3 с захватными органами 2 уста навливашт в исходное положение Для этого подают давление в Пневмоцилиндр
15 вертикального перемещения, шток пневмоцилиндра смещается вправо и через тяги 16 и 17 воздействует на рычаги 11, которые поднимают траверсу 3 в верхнее положение, При этом ползун
39перемещается по пазу 40, выполненному на кронштейне 41, и так как паз
40параллелен вертикальному перемещению траверсы 3, смещение каретки 8
в горизонтальном направлении не происходит Затем подается давление в полость 34 пневмоцилиндра 28 горизонтального перемещения, а в полость 31 - противодавление, составляющее 0,2-0,4 части от давления в полости 34о Дополнительный шток 30 смещается в верхнее положение, а шток-рейка 27, которая опирается на дополнительный шток 30, - в свое среднее положение Таким образом шток-рейка 27 через шестерню 26, кривопшп 23 и шатун 21 подает траверсу 3 в среднее положение в горизонтальной плоскости. Закрепленный на траверсе 3 копир 19 смещается вместе с траверсой 3 и своим наклонным пазом 20 воздействует на ползун 38., установленный на двуплечем рычаге 37, который перемещает ка- ратку 8 в среднее положение, а вместе с ней перемрщаютск в среднее положение и руки 7 с захватными органами 2, Следовательно, руки 1 и 7 находятся за пределами рабочих позиций блоков 42-44 штампа 45 в верхнем, Тое. исходном, положении и не препятствуют рабочему ходу пресса (не показан).
После оконча1О1я рабочего хода пресса подается давление в полости 32 и 33 пневмоцилиндра 28 горизонтального перемещения, а в полостях 31 и 34 давление снижается. При этом дополнительный шток 30 переходит в крайнее нижнее положение, а шток-рейка 27 - в крайнее верхнее положение и через шестерню 26, вал 25, кривошип 23 и шатун. 21 перемещает траверсу 3 в крайнее левое положение (фиг.1)о Захватные органы 2, установленные на руках-1, .оказываются соответственно над деталью не показано) в блоке 44 штампа 4..Т и над заготовками в загрузочном устройстве, находящемся за пре16044966
пространственное перемещение, переходит в крайнее левое положение (фиг.4) и перемещает каретку 8, так J как ось 36 двуплечего рычага 37 за креплена на каретке Во Вместе с каре кой . 8 в крайнее левое положение перемещаются руки 7 с их захватными органами 2, которые оказываются над дета- ,Q ля№1 в блоках 42 и 43 штампа 45 о При этом ход рук 1 и 7 различный. Снимается давление в цилиндре 15 вертикаль ного перемещегшя, и его шток под действием пружины 35 перемещается вле- )5 во и через тяги 16 и 17 воздействует на рычаги 11, которые опускают травер су 3 с захват}шми органами 2 Проис- ход11т захватывание деталей в блоках 42-44 штампа 45, а в загрузочном 20 устройстве - заготовок После этого вновь подается давление в пнезмоци- линдр 15 вертикального перемощения, шток перемещается вправо, сжимая пружину 35, и чарез тяги 1б и 17 воздей- 25 ствует на рычаги 11, которые перемещают траверсу 3 и верхнее положеиие - детали извлекаются из блоков 42-44 штампа 45 и зат отовки из загрузочного устройства
30 Дтя перемещения траверсы 3 в крайнее правое положе1гае (фиг,1) подается давление в полость 31 пневмоцилиндра 28 горизонтального перемещения, а в полостях 32 и 33 давлегаге снимается. Шток-рейка 27 перемещается в нижнее положение и через шестерню 26, вал 25, кривошип 23 и шатун 2 перемещает траверсу 3 в крайнее вое положение. При этом руки 1 с захватными органами 2 переносят заготовку из загрузочного устройства к блоку 42 mTaNma 45, а из блока 44 - к таре,При перемещении траверсы 3 смещается закрепленный на ней копир д5 19 и своим наклонным пазом 20 воздействует на .ползун 38, Двуплечий рычаг 37 переходит и крайнее правое положе1ме (фиг..4) и перемещает в свое крайнее правое положение каретку 8 50 так, что деталь от блока 42 штампа 45 перемещается к блоку 43, а из блока 43 - к блоку 44,
После снятия давления в пневмо- цилиндре 15 вертикального перемеще1дая
35
40
--I- -- - ij%-..Av f. л iic; t PiC J.cl U i Л
делами пресса (не показано). При пере-55 его щток под действием пр татны 35 пе-.
мещении траверсы 3 смещается закрепленный на ней копир 19 и своим наклонным пазом 20 воздействует на двуплечий рычаг 37, который,совершая сложное
ремещается влево и через тяги 16 и 17 воздействует на рычаги 11, которые опускают траверсу 3 с захватныьш органами 2о Захватные органы отключают
6044966
пространственное перемещение, переходит в крайнее левое положение (фиг.4) и перемещает каретку 8, так J как ось 36 двуплечего рычага 37 за креплена на каретке Во Вместе с кареткой . 8 в крайнее левое положение перемещаются руки 7 с их захватными органами 2, которые оказываются над дета- ,Q ля№1 в блоках 42 и 43 штампа 45 о При этом ход рук 1 и 7 различный. Снимается давление в цилиндре 15 вертикального перемещегшя, и его шток под действием пружины 35 перемещается вле- )5 во и через тяги 16 и 17 воздействует на рычаги 11, которые опускают траверсу 3 с захват}шми органами 2 Проис- ход11т захватывание деталей в блоках 42-44 штампа 45, а в загрузочном 20 устройстве - заготовок После этого вновь подается давление в пнезмоци- линдр 15 вертикального перемощения, шток перемещается вправо, сжимая пружину 35, и чарез тяги 1б и 17 воздей- 25 ствует на рычаги 11, которые перемещают траверсу 3 и верхнее положеиие - детали извлекаются из блоков 42-44 штампа 45 и зат отовки из загрузочного устройства
30 Дтя перемещения траверсы 3 в крайнее правое положе1гае (фиг,1) подается давление в полость 31 пневмоцилиндра 28 горизонтального перемещения, а в полостях 32 и 33 давлегаге снимается. Шток-рейка 27 перемещается в нижнее положение и через шестерню 26, вал 25, кривошип 23 и шатун 2 перемещает траверсу 3 в крайнее вое положение. При этом руки 1 с захватными органами 2 переносят заготовку из загрузочного устройства к блоку 42 mTaNma 45, а из блока 44 - к таре,При перемещении траверсы 3 смещается закрепленный на ней копир д5 19 и своим наклонным пазом 20 воздействует на .ползун 38, Двуплечий рычаг 37 переходит и крайнее правое положе1ме (фиг..4) и перемещает в свое крайнее правое положение каретку 8 50 так, что деталь от блока 42 штампа 45 перемещается к блоку 43, а из блока 43 - к блоку 44,
После снятия давления в пневмо- цилиндре 15 вертикального перемеще1дая
35
40
-I- -- - ij%-..Av f. л iic; t PiC J.cl U i Л
55 его щток под действием пр татны 35 пе-.
ремещается влево и через тяги 16 и 17 воздействует на рычаги 11, которые опускают траверсу 3 с захватныьш органами 2о Захватные органы отключаются, и происходят загрузка ..блоков m-vattaa 45 заготовками-и разгрузка готовой детали в .
-После подачи давления в пневмоци- линдр 15 вертикального перемещения его шток под действием пружины 35 перемещается влево и через тяги 16 и 17 и рычаги 11 поднимает траверсу 3 вверх после подачи давления в полость 34 противодавление ч полости 31 составляет 0,2-0,4 части от давления в полости 34о Шток-рейка 27 через шестерню 26, кривошип 23 и шатун 21 перемещает траверсу 3 с руками 1 в исходное положение. В среднее положение, смещается каретка 8 с руками 7 (как описано) т.е. руки 1 и 7 нахог дятся в исходном положении и не меша- ют рабочему ходу пресса.
Далее цикл работы повторяется« Механизм перемещения каретки 8, состоящий из двуплечего рычага 37, ползунов 38 и 39, кронштейна 41 с пазом ,40 .и копира 19 с наклонным пазом 20, обеспечивает для каретки 8 с руками 7 режим разгона и торможения.
5
аналогичный-режиму разгона и торможения траверсы 3
Формула изобретения
Промышленный робот по авто св, № 1155334,-о тличающийся. тем, что, с целью расширения технологических возможностей за счет обслуживания многопозиционного технологического оборудования с малым расстоянием между его рабо чими позициями, он снабжен дополнительным двуплечим рычагом, копиром, имеющим наклонный паз и установленным на траверсе, ползунами, выполненными в виде роликов, а также кареткой, установленной на траверсе с возможностью возвратно- поступательного перемещения в горизонтальном направлении, связанной с дополнительным двуплечим рычагом, на концах которого закреплены ползуны, и несущей дополнительные руки с захватными органами, причем один из ползунов образует кинематическую пару с наклонным пазом копира, а другой - с вертикальным пазом, дополнительно выполненным на станине о
-4/


| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1107931A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
Изобретение относится к области станкостроения, в частности к средствам механизации и автоматизации, и может быть использовано в роботизированных комплексах и автоматических линиях, например, штамповки, а также для загрузки и выгрузки заготовок. Цель изобретения - расширение технологических возможностей за счет обслуживания многопозиционного технологического оборудования с малым расстоянием между его рабочими позициями. При работе руки 7 с захватными органами 2, которые закреплены на каретке 8, установленной на траверсе 3, имеющей возможность возвратно-поступательного перемещения в горизонтальном направлении посредством дополнительно введенного двуплечего рычага, на концах которого закреплены ползуны, выполненные в виде роликов, захватные органы 2 руки 7 смещаются относительно захватных органов 2 руки 1. Такое смещение обеспечивается вертикальными пазами станины 5, в которые входят одни концы двуплечих рычагов, и наклонным пазом 20 каретки 8, куда входят другие концы этих рычагов. 4 ил.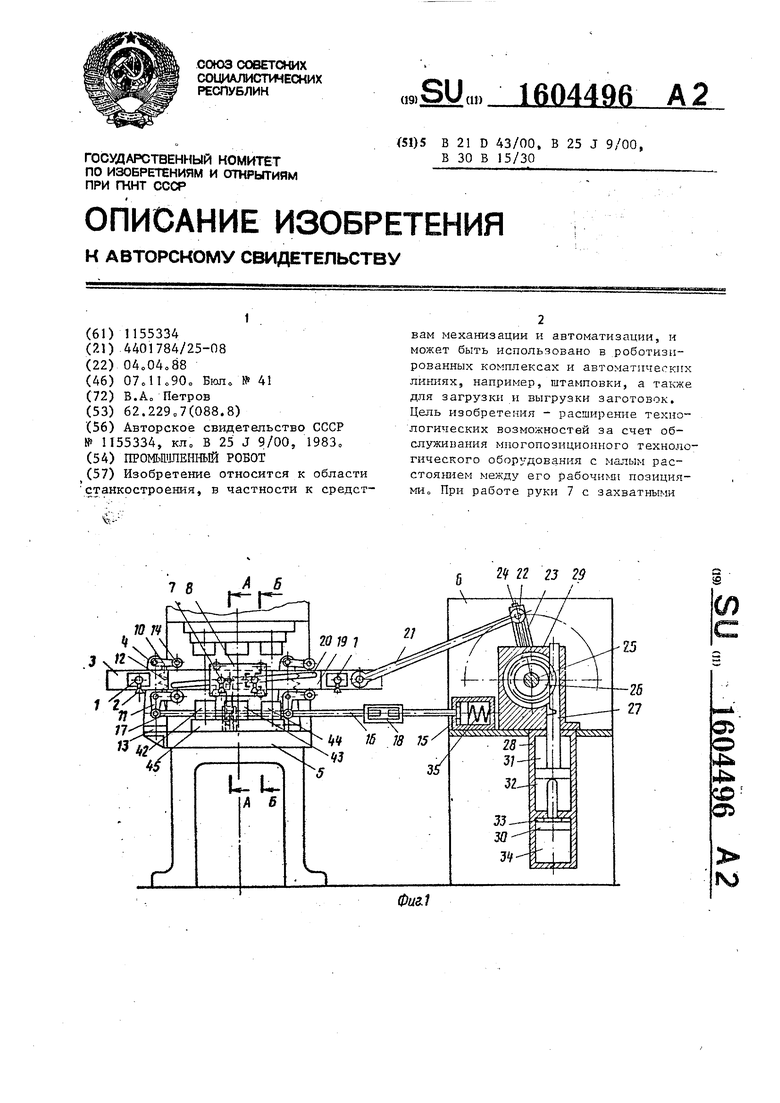
фиг. 2
Фи.2.
/2SZZZ7 Фиг.
| Промышленный робот | 1983 |
|
SU1155334A1 |
