Изобретение относится к обработке металлов давлением и может быть использовано для подачи материала в рабочую зону пресса.
Целью изобретения является повышение надежности работы.
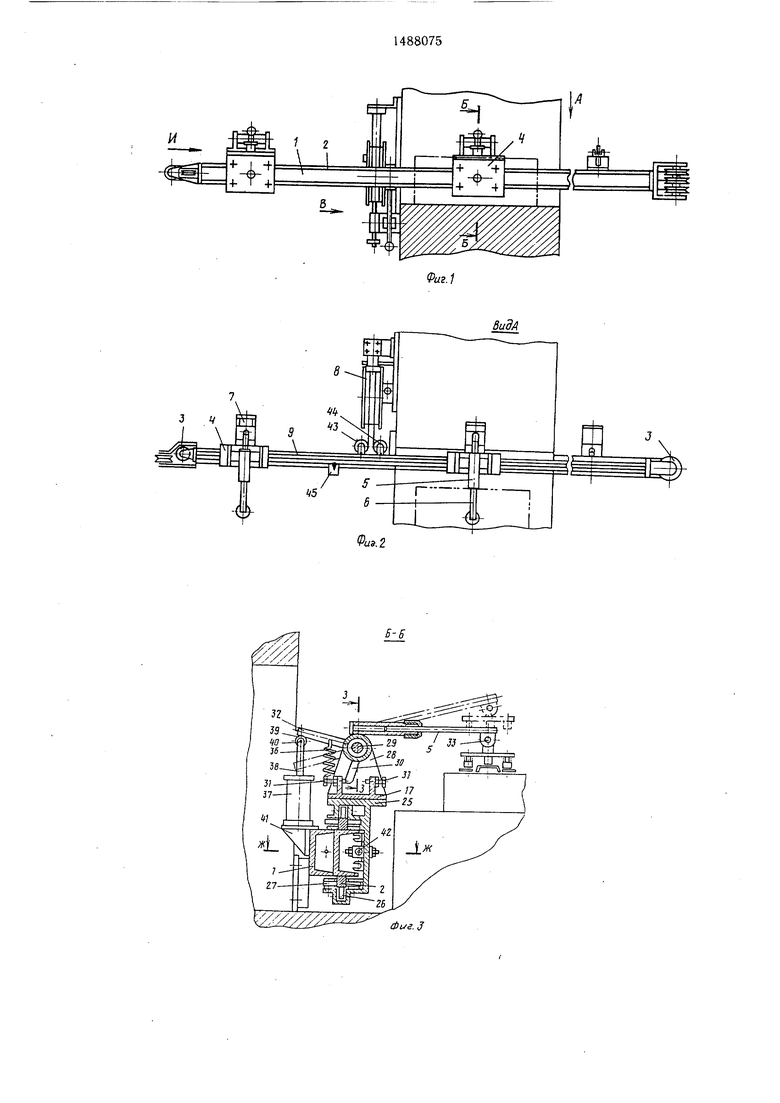
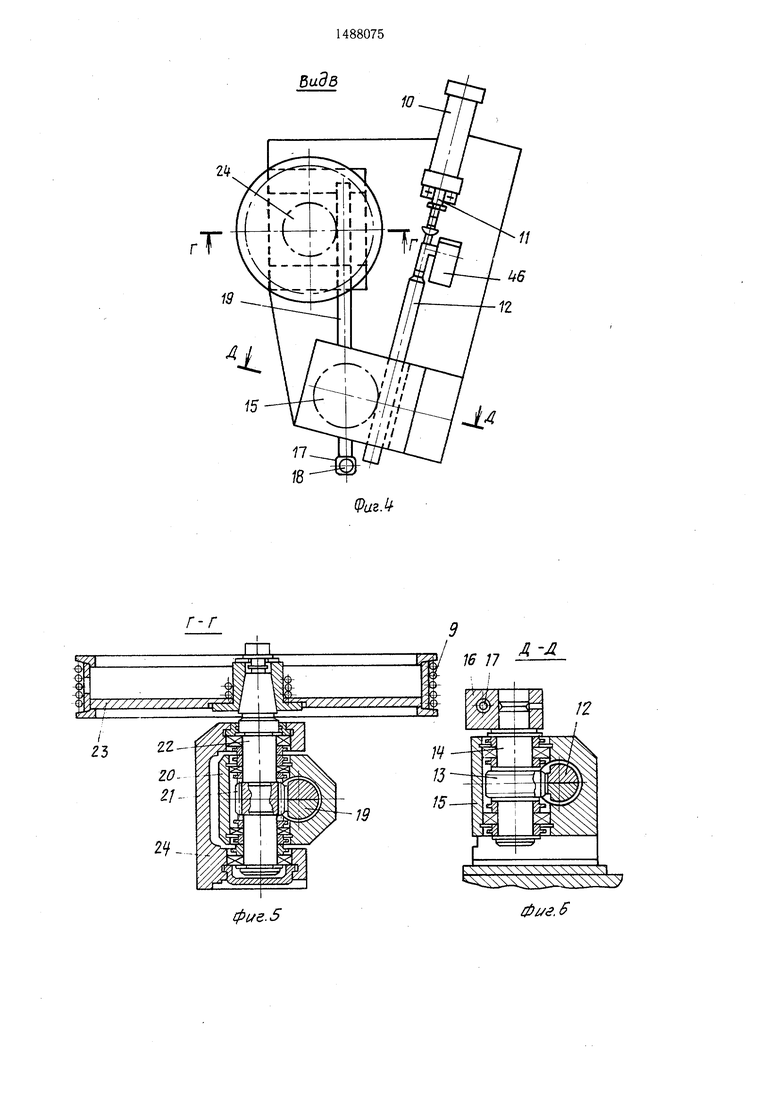
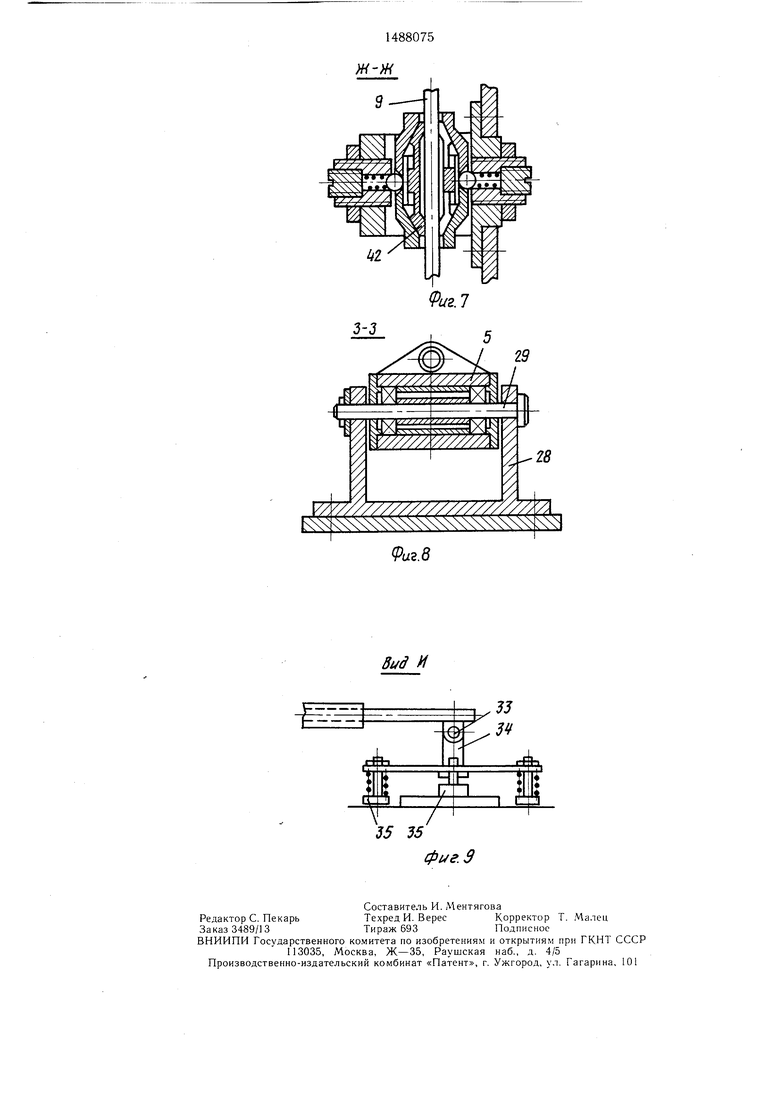
На фиг. 1 изображено устройство для подачи материала в рабочую зону пресса; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 4; на фиг. 6 - разрез Д-Д на фиг. 4; на фиг. 7 - разрез Ж-Ж на фиг. 3; на фиг. 8 - разрез 3-3 на фиг. 3; на фиг. 9 - вид И на фиг. 1.
Устройство-содержит траверсу 1 с прямолинейными направляюшими 2, на торцах которой установлены системы блоков 3, а на направляюш их 2 установлены две каретки 4 с руками 5 и схватами 6. На позициях загрузки и выгрузки установлены стационарные силовые пневмоцилиндры 7 подъема руки 5. Привод 8 перемешения кареток 4 установлен стационарно на основании, являющемся передней плоскостью станины пресса (не показаны), связан кинематически с каретками 4 тросом 9 и содержит рабочий силовой пневмоцилиндр 10, на штоке 11 которого шарнирно закреплена приводная рейка 12, находяш,аяся в зацеплении с приводной шестерней 13, установленной на приводном валу 14 в корпусе 15. На валу 14 закреплен кривошип 16 с ползуном 17, соединенным шарнирно с помошью оси 18 с ведомой рейкой 19, расположенной в качающемся корпусе 20 и входящей в зацепление с ведомой шестерней 21, установленной на ведомом валу 22 совместно с тросовым барабаном 23, расположенным в корпусе 24. Каретки 4 состоят из корпуса 25, на котором установлены на эксцентриковых осях 26 ко СХ) СХ)
О
ел
леса 27. К корпусу 25 каретки 4 крепится кронштейн 28, в цапфах которого расположена ось 29, на которой установлена рука 5. На цапфе руки 5 установлены упоры 30 для регулировки положения и регулируемые упоры, выполненные в виде регулировочных болтов 31, а также упоры 32. На руке 5 шар- нирно на оси 33 установлена качающаяся подвеска 34 с магнитными или вакуумными схватами 35. Рука 5 с кронштейном 28 замк- нута посредством пружин 36. Пневмоци- линдр 7 состоит из корпуса 37 со штоком 38, на котором установлен ролик 39 на оси 40. Пневмоцилиндр 7 установлен на кронштей- rte 41, закрепленном к траверсе 1.
На корпусе 25 каретки 4 установлен цан- говый зажим 42 для зажима троса 9. Траверса 1 состоит из сварной рамы с закрепленными на ней прямоугольными направляющими 2, блоков 43 с кронштейнами 44. Для фиксации кареток в среднем положении привода 8 перемещения кареток на траверсе 1 установлен конечный выключатель 45, с помощью которого Пневмоцилиндр запирается давлением в середине рабочего хода. Для торможения в среднем положении установлен путевой пневмодроссель 46. Рука 5 выполнена в виде двуплечего рычага, одним из концов которого является упор 32.
Устройство работает следующим образом.
На руки 5 кареток 4 устанавливают схваты 6, соответствующие данной детали и за- готовки, загружают загрузочное устройство заготовками (не показано), включают пресс. Руки 5 опускают при помощи пневмоцилинд- ра 7, схватами 6 берут заготовку на первой позиции и деталь со штампа (не показаны). Пневмоцилиндры 7 отключаются и руки 5 под действием пружин 36 поднимаются до упоров ЗО. Срабатывает датчик (не показан) положения рук 5 и включает Пневмоцилиндр 10 перемещения кареток 4. Шток 11 пневмо- цилиндра 10 перемещает рейку 12, которая поворачивает шестерню 13 с кривошипом 16 на 180°. Кривошип 16 перемещает рейку 19, которая вращает шестерню 21 с тросовым барабном 23. Одна ветвь троса сматывается с барабана 23, а вторая наматывается и перемещает каретки 4 на вторую позицию (не показана). Ход кареток 4 можно отрегулировать изменением плеча кривошипа 16 или длиной хода пневмоцилиндра 10. Скорость перемещения кареток 4 регулируется пнев- модросселями (не показаны). Перемещение кареток 4 начинается медленно с ускорением и заканчивается медленно с торможением, что достигается изменением положения ползуна 17 кривошипа 16, который начинает ход с одной мертвой точки и заканчивает во второй мертвой точке.
После прихода кареток 4 на вторую позицию включаются пневмоцилиндры 7 и отпускают руки 5, укладывая заготовку в штамп (не показан), а деталь в тару или
транспортное устройство (не показаны). Затем отключаются пневмоцилиндры 7 и руки 5 под действием пружин 36 возвращаются в исходное положение.
Включается Пневмоцилиндр 10 перемещения кареток 4 в исходное положение. При достижении штоком 11 пневмоцилиндра 10 среднего положения он наезжает выступом на ролик (не показан) путевого пневмодрос- селя 46, Пневмоцилиндр Ш тормозится и останавливается вместе С каретками 4. Включается пресс и производится штамповка заготовки. После возврата ползуна (не показан) пресса в верхнее положение снова включается Пневмоцилиндр 10 перемещения заготовок и плавно трогается с места. После схода выступа щтока 11 с путевого пневмо- дросселя 46 скорости увеличиваются и каретки 4 возвращаются в исходное положение. Цикл работы повторяется в автоматическом режиме.
Формула изобретения
1.Устройство для подачи материала в рабочую зону пресса, содержащее смонтированную на основании горизонтально направляющую, по меньшей мере одну каретку, подвижно установленную на направляющей, узел крепления, смонтированный на каретке, привод, связанный через тянущий орган с узлом крепления, двуплечий рычаг, шарнир- но закрепленный на каретке с возможностью поворота в вертикальном направлении и подпружиненный в этом направлении, схват, смонтированный на одном из концов двуплечего рычага, и привод поворота двуплечего рычага, отличающееся тем, что, с целью повышения надежности работы, привод поворота двуплечего рычага выполнен в виде силовых цилиндров со штоками, смонтированных на основании и расположенных по обе стороны каретки с возможностью поочередного взаимодействия штоками со свободным концом двуплечего рычага, и регулируемых по длине упоров, смонтированных на каретке с возможностью взаимодействия с двуплечим рычагом, а узел крепления выполнен в виде цангового зажима, охватывающего тяговый орган.
2.Устройство по п. 1, отличающееся тем, что тяговый орган выполнен в виде троса.
3.Устройство по пп. 1 и 2, отличающееся тем, что привод выполнен в виде рабочего силового цилиндра, закрепленного на основании, приводного вала, смонтированного на основании и несущего приводную шестерню, приводной зубчатой рейки, связанной с рабочим силовым цилиндром и установленной с возможностью взаимодействия с приводной шестерней, кривошипа, закрепленного на приводном валу, ведомого вала, несущего ведомую шестерню и барабан для намотки троса, и ведомой зубчатой рейки, шарнирно связанной с кривошипом и установленной с возможностью взаимодействия с ведомой шестерней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Устройство для перемещения и контования штучных заготовок | 1987 |
|
SU1479180A1 |
| Устройство для подачи заготовок в зону обработки | 1986 |
|
SU1398961A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для подачи материала в рабочую зону пресса. Цель изобретения - повышение надежности работы. Материал подается в рабочую зону пресса схватами. Схваты смонтированы на двуплечем рычаге, шарнирно закрепленном на каретке с возможностью поворота в вертикальном направлении и подпружиненном в этом направлении. Каретка подвижно установлена на направляющей и связана через цанговой зажим с тросом, намотанным на барабан. Барабан приводится в движение через ведомую шестерню и ведомую зубчатую рейку от кривошипа. Кривошип смонтирован на приводном валу, несущем приводную шестерню. Приводная шестерня входит в зацепление с приводной зубчатой рейкой, связанной с рабочим силовым цилиндром. Двуплечий рычаг приводится во вращательное движение от штоков силовых цилиндров, закрепленных на основании по обе стороны каретки. Угол поворота двуплечего рычага ограничен регулируемыми по длине упорами, закрепленными на каретке. 2 з.п. ф-лы, 9 ил.
5-5
. 3
Виде
Г-Г
фиг. 5
4
д-л
п
ф1/е.б
V7/7/
29
Вид И
35 J5
фиг.З
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для подачи заготовок в зону обработки | 1986 |
|
SU1398961A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
