бункер 4 с захватами 6, отводящие лотки 7, механизмы поштучной вьщачи, выполненные в виде двух отсекатедей 8 и 9, механизьь распознавания положения Деталей , выполненные в виде двуплече- го рычага 10,взаимодейству гадего с ко- .пиром 12,механизмы вторичной ориентации, выполненные в виде диска 15 с четырехугольным отверстием 16 и тран - спортной цепи. 17 с приспособлением- спутником, выполненным в виде цилиндра 19 с лыской 20 и магнитом 21, При. повороте ротора детали поштучно подаются в механизм вторичной ориентации либо в момент поворота диска 15 по часовой стрелке, либо в момент поворота его против часовой стрелки, обеспечивая на приспособлении-спутнике ориен- тированное положение деталей. Момент вьщачи деталей определяется механизмом распознавания положения деталей. 12 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ориентирования и выдачи изделий типа колпачков | 1987 |
|
SU1452770A1 |
| Загрузочный ротор | 1990 |
|
SU1726195A1 |
| Роторный автомат питания | 1979 |
|
SU891323A1 |
| Ротор ориентации штучных деталей | 1976 |
|
SU622644A1 |
| Роторный автомат питания | 1987 |
|
SU1491653A1 |
| Устройство для распределения деталей | 1986 |
|
SU1426747A1 |
| Устройство для ориентации деталей | 1989 |
|
SU1641567A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Устройство для вторичной ориентации цилиндрических деталей | 1983 |
|
SU1087300A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1998 |
|
RU2130373C1 |
Изобретение относится к станкостроению и может найти применение при подаче асимметричных уголков в роторно-конвейерных линиях. Цель изобретения - повышение надежности работы устройства. Загрузочный ротор содержит бункер 4 с захватами 6, отводящие лотки 7, механизмы поштучной выдачи, выполненные в виде двух отсекателей 8 и 9, механизмы распознавания положения деталей, выполненные в виде двуплечего рычага 10, взаимодействующего с копиром 12, механизмы вторичной ориентации, выполненные в виде диска 15 с четырехугольным отверстием 16 и транспортной цепи 17 с приспособлением-спутником, выполненным в виде цилиндра 19 с лыской 20 и магнитом 21. При повороте ротора детали поштучно подаются в механизм вторичной ориентации либо в момент поворота диска 15 по часовой стрелке, либо в момент поворота его против часовой стрелки, обеспечивая на приспособлении-спутнике ориентированное положение деталей. Момент выдачи деталей определяется механизмом распознавания положения деталей. 12 ил.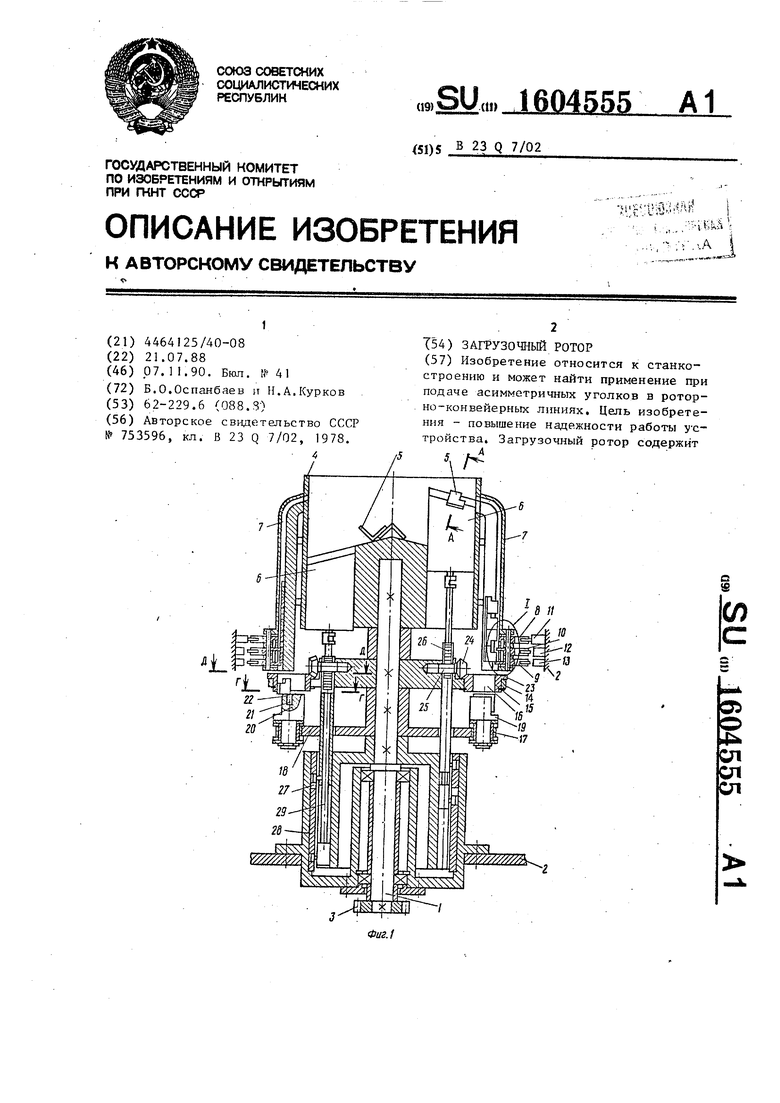
Изобретение относится к станкостро- етт и может быть использовано в автоматических роторно-конвейерных линиях для ориентированной подачи дета- лей типа асимметричных уголков. Цель изобретения - повышение надежности при подаче деталей .типа асимметричных уголков за счет обеспечения выдачи изделий в механизм вторичной ориентации в определенные моменты его движения.
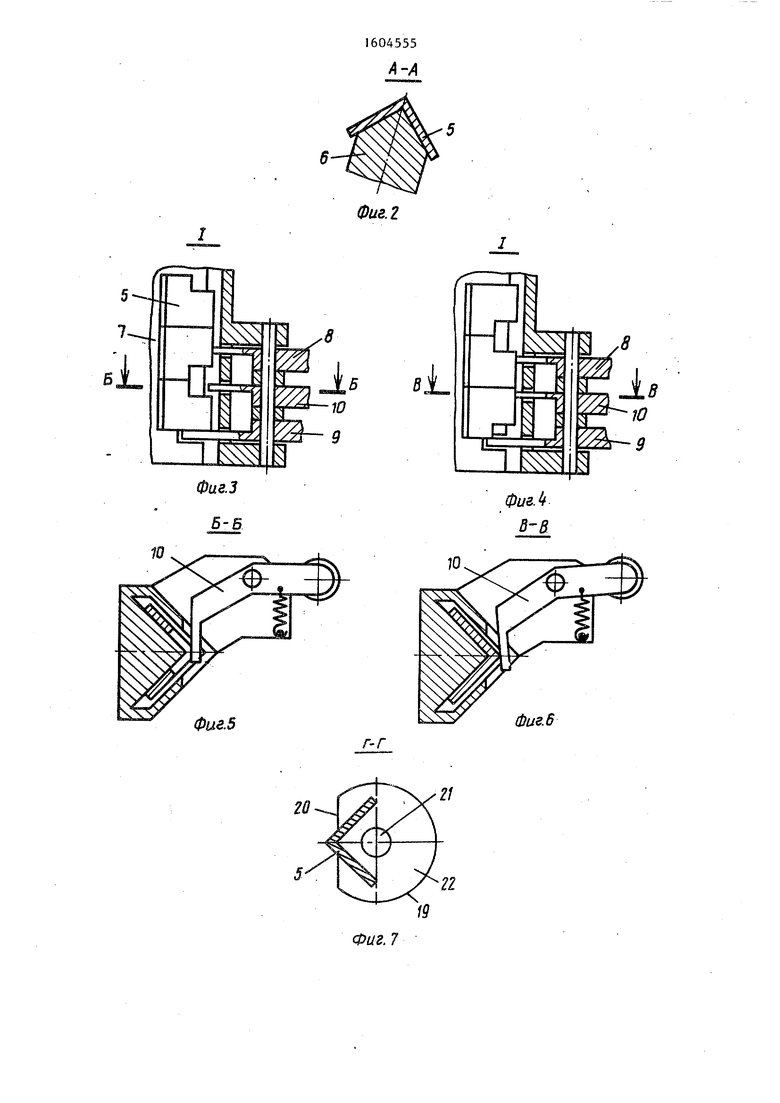
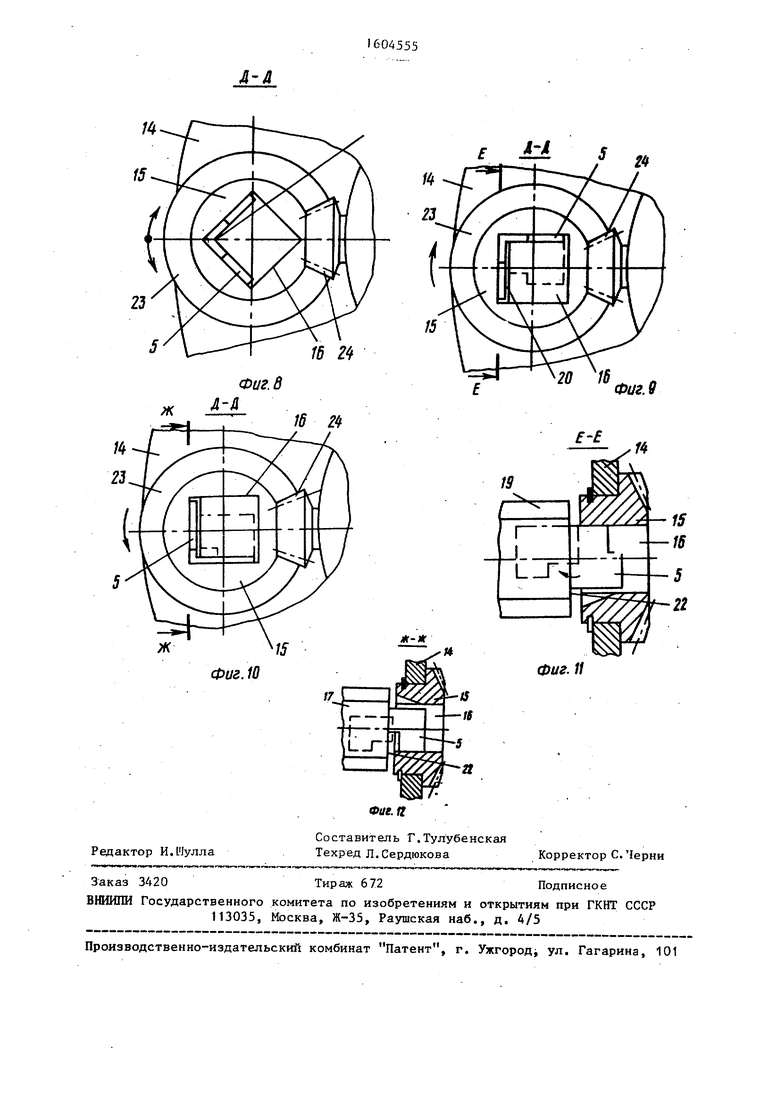
На фиг.1 изображен загрузочный ротор, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг. 3 и 4 - узел I на фиг.1 при различных положениях деталей; на фиг,5 - разрез Б-Б на фиг.З; на фиг.6 - разрез Б-3 на фиг.4; на фиг.7 - разрез Г-Г на фиг. 1; на фиг.8-10 - разрез Д-Д на фиг.1, промежуточные .положения механизма вторичной ориентации; на фиг.П - разрез Е-Е на фиг.9; на фиг.12 - разрез Ж-Ж
на фиг.10.
Загрузочный ротор содержит вап 1, смонтированный на основании 2 с возможностью вращения от привода (не показан) через шестерню 3, смонтирован ный на валу 1 бункер 4 дпя изделий 5, снабженный захватами 6, установлен- ными с возможностью возвратно-поступательного перемещения в .вертикальном найравлении, отводящие лотки 7, механизмы поштучной вьщачи, вьшолненные в виде двух отсекателей 8 и 9, смонти- рованных на отводящих лотках 7, механизм распознавания положения деталей выполненный в виде двуплечего рычага 10, установленного между отсекателя ми 8 и 9, копиры 11-13, закреплен- ные на основании 2 с возможностью вза имодействия соответственно с отсека телем 8, рычагом 10 и отсекателем 9, установленные на барабане 14, закреп
ленном на валу 1, механизмы вторичной ориентации, выполненные в виде установленного с возможностью поворота в горизонтальной плоскости диска 15 со сквозным четырехугольным отверстием 16, один из углов которого в исходном положении обращен к периферии ротора, и транспортную цепь 17, огибающую звездочку 18 с приспособлением- спутником, выполненным в виде размещенного под отверстием 16 цилиндра 19 с лыской 20 на его боковой поверхности со стороны, обращенной к периферии ротора, и магнита 21, установленного на торце 22 цилиндра 19.
Для осуществления поворота диска 15 на нем выполнено (смонтировано) коническое зубчатое колесо 23, входящее в зацепление с конической шестерней 24, на которой смонтирована шестерня 25, входящая в зацепление с зубчатой рейкой 26, установленной с возможностью возвратно-поступательного движения от неподвижного копира 27. Захваты 6 получают возвратно-поступательное движение от копира 28 через ползун 29.
Загрузочный ротор работает следующим образом.
При повороте ротора захватами 6, перемещаемыми ползунами 29, детали (например, уголки с выемкой по ротору) подаются в отводящие лотки 7. Опускаясь вниз по лотку 7, детали по- --адают в зону действия отсекателей 8 и 9 механизма поштучной выдачи и рычага 10 механизма распознавания деталей.
Б исходном положении отсекатель 9 препятствует проходу деталей, а отсекатель 8 открыт. При дальнейшем повороте ротора отсек.-этель 8,- управляемый копиром П, перекрывает лот ок 7 и отсекает предпоследнее изделие, одновременно с ним начинает движение двуплечий рычаг 10, управляемый копиром 12, ориентированный на элемент асим- метрии изделия 5, например сквозной паз или выемка (фиг.5 и 6), а копир 13 перемещает отсекатель 9, разрешая выход из лотка 7 последней детали.
В процессе работы уголки в лотке 7 могут располагаться как выемкой вверх, так и выемкой вниз. В первом случае (фиг.З и 5) рычаг 10 входит в выемку уголка и при отводе отсекате- ля 9 деталь падает в диск 15, который совершает движения по часовой программе: поворот по часовой стрелке - возврат в исходное положение и поворот против часовой стрелки - возврат в исходное положение. Деталь в первом случае попадает в диск 15 во время первого такта его движения, при этом одно из плеч изделия 5 оказывается свободным и она проворачивается, занимая на цилиндре 19 ориентированное положение (фиг.9 и 11). Движение диска 15 против часовой стрелки совершается уже без изделия.
Во втором случае (фиг. 4 и 6) при отводе отсекателя 9 изделие во время первого такта движения диска 15 удерживается рычагом 10 и освобождается им лишь во время движения диска 15 против часовой стрелки. В этом случае деталь также на приспособлении-спутни ке занимает ориентированное положение Таким образом, независимо от. положения деталей в лотке 7 на приспособлении-спутнике они окажутся однозначно ориентированными и удерживаются в этом положении, магнитом 21. Далее цикл работы повторяется,
Формула изобретения
Загрузочный ротор, содержащий установленный с возможностью вращения вал, закрепленный на нем бункер с равномерно расположенными по его окружности захватами, установленными с возможностью возвратно-поступательного перемещения в вертикальном направлении, отводяш,ие лотки, механизмы поштучной выдачи, размещенные под ними механизмы вторичной ориентации, каждый из которых выполнен в виде установленного с возможностью поворота в горизонтальной плоскости диска со сквозным отверстием, механизмы распознавания положения деталей и транспортную цепь с приспособлениями-спутниками, отличающийся тем, что, с целью повышения надежности при подаче деталей типа асимметричных уголков, механизм поштучной вьщачи выполнен в виде двух отсекателей, а механизм распознавания положения деталей выполнен в виде двухплечего рычага, установленного между отсекателями с возможностью взаимодействия с дополнительно введенным кулачком, при этом приспособление- спутник выполнено в виде цилиндра с лыской, выполненной на его боковой поверхности со стороны, обращенной к периферии ротора, и магнита, установленного на торце цилиндра.
в
Фие.5
20
Фиг. 2
в
фиг.
в-в
10
Фиг. 6
Фаг. 7
л-л
| Ротор ориентации штучных деталей | 1978 |
|
SU753596A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
