(54) РОТОРНЫЙ АВТОМАТ ПИТАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1979 |
|
SU891323A1 |
| Роторный автомат питания | 1978 |
|
SU751573A1 |
| Ротор ориентации штучных деталей | 1980 |
|
SU906666A2 |
| Устройство для вторичной ориентации деталей | 1976 |
|
SU601129A1 |
| Ротор ориентации штучных изделий | 1978 |
|
SU841904A1 |
| Роторный автомат питания | 1987 |
|
SU1491653A1 |
| Устройство для вторичной ориентации | 1987 |
|
SU1425035A1 |
| Загрузочный ротор | 1985 |
|
SU1306684A1 |
| РОТОРНЫЙ АВТОМАТ-ПИТАТЕЛЬ | 1967 |
|
SU197378A1 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |

1
Изобретение относится к станкостроению в частности к роторным машинам, и предназначено для поштучной выдачи деталей типа колпачков на позиции рабочих роторов.
Известен роторный автомат питания,
содержащий станину, бункер, заполненный Деталями типа колпачков и сообшенный с течками через ворошители, отсекатели подаваемых деталей, механизмы ориентации, помешенные под каждой течкой и выполненные в виде возвратно-поворотного цилиндра с захватом и сквозным диаметральным отверстием, барабан и диск с приемникамии подпружиненными поворотными рычагами, несущими на концах штыри и служашими
для вывода последних из гнезд прием-теика вручную в случае обнаружения неправильно ориентированных деталей (донышком вверх) при визуальном наблюдении ij.
Недостатком этого роторного автомата питания является возможность случаев подачи на рабочие позиции роторных машин не« правильно ориентированных деталей донь1ш- ком вверх, так как в процессе эксплуатации роторного автомата питания происходит звг
рязнение течек, отводящих детали с бункера к приемникам, технологической грязью, и подаваемая деталь может прилипать к стенкам течки на участке, расположентюм ниже верхнего отсекателя.
Целью изобретения является обеспечение удаления из потока неправильно оркентированных деталей, исключение подачи их на позиции рабочих роторов.
Для этого роторный автомат питания снабжен механизмом съема неправильно ориентированных деталей, выполненным в виде неподвижно закрепленных на станине кулачка, контактирующего с поворотными рычагами, и вилки, имеющей наклонную плокость с пазом, служащим для прохождения штырей, причем паз расположен на траектории движения штырей и имеет ширину, меньшую минимального размера нижнего торца подаваемой детали. Кроме того, боковые стороны вилки, образующие паз, соединены между собой упругой перемычкой, а каждый поворотный рычаг снабжен установленным соосно со штырем приемника
роликом, посредством которого он взаимодействует с кулачком.
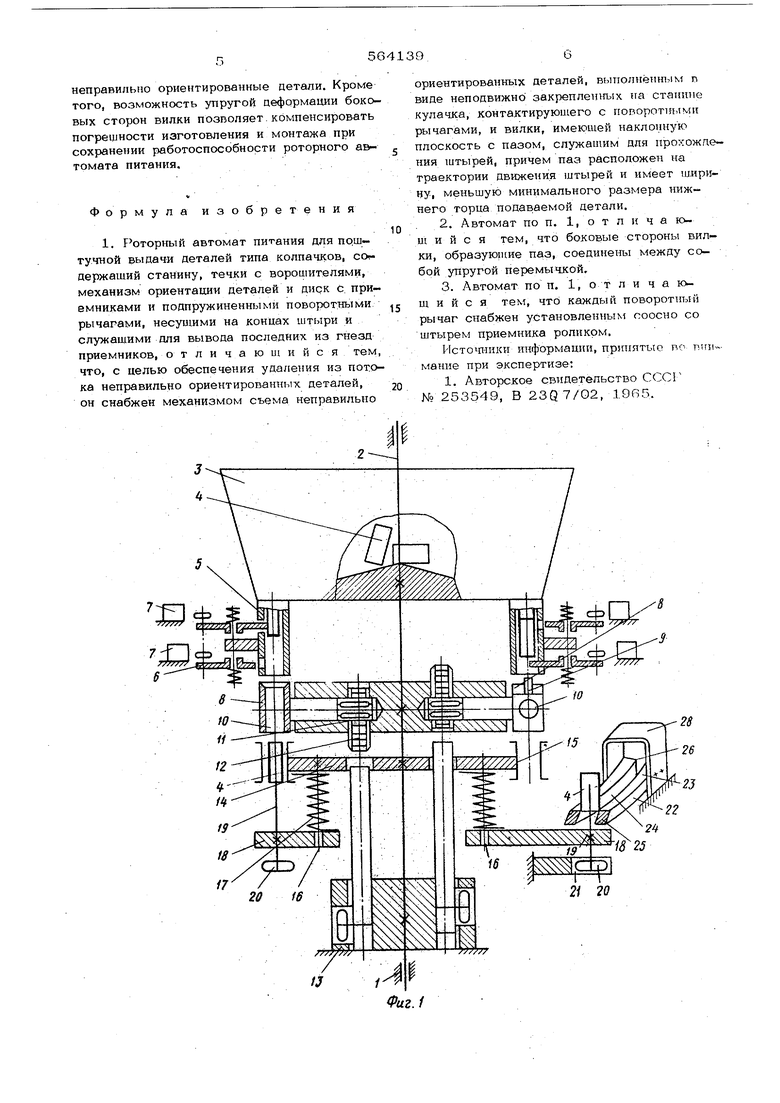
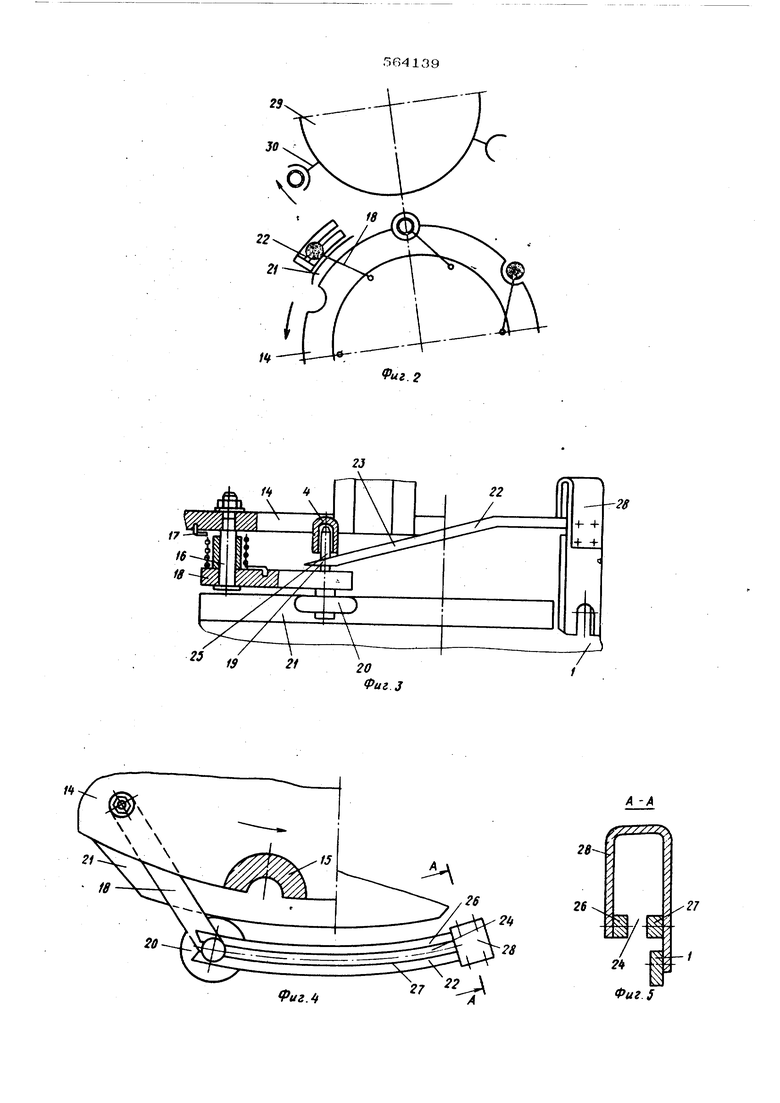
lia фиг. i схематично изображен роторный автомат питания, продольный разрез; на фиг. 2 представлена схема сопряжения роторного автомата питания с транспортным ротором; на фиг, 3 - механизм съема неправильно о; иентированных деталей, вид сбоку; на фиг. 4 - то же, вид сверху; на фиг. 5 - разрез А-А фиг. 4; на фиг. 6
изображена схема съема неправильно ориентированных деталей; на фиг. 7 - механизм ориентации в продольном разрезе в поло- I приема детали; на фиг. 8 - то же, )s положении ориентации.
Роторный автомат питания содержит станину 1, вал 2, на котором жестко закреплен бункер 3, заполненный подаваемыми деталями 4 и сооб.енный с течками 5 через ворошители (не показанные на чертежах), размеи1енными равномерно по окружности бункера 3. выходе из каждой течки 5 установлены отсекатели 6 подава- е1«1ых деталей 4, которыми управл1пот неподвижные копиры 7, Под каждой течкой 5 помешен дмеханизм ориентации, выполненный в виде возвратно-поворотного цилиндра 8 с захватом 9 и сквозным диаметральным отверстием 10, расположенным под углом к захвату 9. Цилиндр 8 имеет тес терню 11, входящую в зацепление с зубча- тоу рейкой 12, приводимой в возвратнопоступательное движение от неподвижного кругового копира 13.
Ниже механизма ориентации на валу 2 жестко посажен диск 14, в котором равномерно по окружности смонтированы приемники 15 и оси 16. Па осях 16 с нижней стороны диска 14 установлены с возможностью поворота на определенный угол под- пружиненные пружиной 17 рычаги 18, несушие на свободных концах штыри 19с роликом 2О, KOTOp ie в исходном положении расположены под приемником 15 соосно с последними. Шгыри 19 служат для подперживания в приемнике 15 правильно ориентированных деталей 4 и захвата неправильно ориентированных деталей 4, а ролики 20 служат для периодического взаимодействия с кулачком 21, неподвижно закреплен- ным на станине 1. На станине 1 также неподвижно закреплена вилка 22, имеющая наклонную плоскость 23с пазом 24, служащим для прохождения штырей 19 и расположенным на траектории движения послед- них. Основание 25 наклонной плоскости 23 вилки 22 расположено ниже уровня нижнего торца надетой на штырь 19 детали, а паз 24 имеет ширину меньи1ую минимального размера нижнего торца подаваемой детали.
Боковые стороны 26 и 27 вилки 22 соединены между собой упругой перемьлчкой 28. В транспортном роторе 29 захватные органы 30 расположены на уровне приемников 15 (выше штырей 19).
Роторный автомат работает следующим образом.
При вращении вала 2 приводятся в дейсвие ворошители (не показанные на чертежах). Одновременно приводятся в возвратно-поступательное движение рейки 12 от неподвижного кругового копира 13. Это движение, благодаря зубчг.тому зацеплению шестерен 11 с рейками 12, преобразуется в возвратно-поворотное движение цилиндров 8 механизмов ориентации. При этом подаваемые детали 4 поступают из бункера 3 в течки 5 предварительно ориентированными относительно своей вертикальной оси и проходят к механизмам ориентации. По- очередтгое поступление деталей 4 в механизмы ориентации происходит благодаря последовательному срабатыванию отсекате лей 6 от копиров 7.
От % еханизмов ориентации детали 4 поступают в приемники 15, причем правильно ориентированные детали, расположенные донышком вниз, поддерживаются штырями
19и на участке передачи захватываются захватными органами 3О транспортного ротора 29, а Неправильно ориентированные детали, расположенные доныи ком вверх, надеваются на штыри 19 и находятся ниже уровня захватных органов ЗО транспортного ротора 29.
При вра11 ении ротора поочередно ролик
0Окаждого поворотного рычага 18 наезжает на купачок 21 и, преодолевая усилие пр -жины (кручения) 17, поворачивает рычаг 18 на определенный угол, ВЫЕЮДЯ при этом uiTi.ipb 19 из гнезда приемника.
При дальнейшем повороте ротора штырь 19 перемеи.ается по пазу 24 вилки 22, а неправильно ориентированная деталь, расположенная на штыре 19 донышком вверх, своим нижним торцом скользит по наклонной плоскости 23 вилки 22 и перемешается ею вверх до полного снятия со штыря 19. Затем снятая со штыря 19 деталь 4 скатывается по лотку в сборник продукции.
После схода ролика 2О с кулачка 21 под действием пр жины 17 рычаг 18 воэврашается в исходное положение, а штырь 19 при этом располагается под приемником 15 соосно с последним.
Наличие упругой перемычки 28 обеспечивает плотный прижим боковых сторон 26 и 27 вилки 22 к штырям 19 при прохождении ими паза 24, что позволяет удалять неправильно ориентированные детали. Кроме того, возможность упругой деформации боковых сторон вилки позволяет, компенсировать погрешности изготовления и монтажа при сохранении работоспособности роторного ав томата питания. Формула изобретения 1. Роторный автомат питания для поштучной выдачи деталей типа колпачков, содержащий станину, течки с ворошителями, механизм ориентации деталей и дидк с приемниками и подпружиненными поворотт1ыми рычагами, несуишми на концах штыри и служащими для вывода последних из гнезд приемников, о т л и ч а ю ш и и с я тем что, с целью обеспечения удаления из пото ка неправильно ориентированных деталей, он снабжен механизмом съема неправильно /7 / / 20 18 ориентированных деталей, выполненным п виде неподвижно закрепленных па станшкз кулачка, контактирующего с поворотнммн рычагами, и вилки, имеющей наклонную плоскость с пазом, служащим для прохождения штырей, причем паз расположен на траектории движения штырей и имеет ширину, меньшую минимального размера нижнего торца подаваемой детали. 2.Автомат по п. 1, о т л и ч а ющ и и с я тем, что боковые стороны вилки, образующие паз, соединены между собой упругой перемычкой. 3.Автомат по п. 1, от л и ч а ющ и и с я тем, что каждый поворотный рычаг снабжен установленным соосно со штырем приемника роликом, Истошики информации, принятые по nuiiмание при экспертизе: 1. Авторское свтшетельство CCCF № 253549, В 23Q 7/02, 19в5. 21 20
/«
25
21
18
20
Риг Л
А -А
/ ZZZZZ
2В27
26
2
Фиг 5
Фиг. 6
Рег. 7
