(54) РОТОРНЫЙ АВТОМАТ-ПИТАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Устройство для вторичной ориентации деталей | 1976 |
|
SU601129A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Многопозиционный автомат для сборки узлов | 1989 |
|
SU1660925A1 |
| Роторный автомат питания | 1987 |
|
SU1754408A1 |
| Ротор ориентации штучных деталей | 1980 |
|
SU906666A2 |
| Роторный автомат питания | 1978 |
|
SU751573A1 |
| Загрузочный ротор | 1990 |
|
SU1752180A3 |
| Устройство для вторичной ориентации | 1987 |
|
SU1425035A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
1
Изобретение относится к станкостроению, в частности к роторно-конвейерным и роторным машинам, и предназначено для поштучной выдачи деталей типа конусных колпачков на позицию рабочих роторов.
Известен роторный автомат питания для поштучной выдачи деталей, содержащий механизм вторичной ориентации, равномерно расположенные по окружности, диск с приемниками, выполненными в виде колец, подпружиненные поворотные рычаги, несущие на концах ловители деталей и съемник неправильно ориентированных деталей 1.
Недостатком этого роторного автомата питания является возможность случаев подачи на рабочие позиции роторных машин неправильно ориентированных деталей донышком вверх, так как в процессе эксплуатации роторного автомата питания происходит загрязнение течек, отводящих детали с бункера к приемникам, технологической грязью, и подаваемая деталь может прилипать к стенкам течки на участке, расположенном верхнего отсекателя. В нем механизм съема удаляет неправильно ориентированные детали донышком вверх и не можёт быть использован для удаления неправильно ориентированных деталей типа конусных колпачков вершинкой вниз.
Цель изобретения обеспечение удаления из потока неправильно ориентированных деталей.
Поставленная цель достигается тем, что автомат снабжен дополнительными съемниками неправильно ориентированных дедалей, установленными в каждой позиции ротора, а каждый приемник снабжен двупле10чими рычагами, установленными с возможностью в горизонтальной плоскости, при этом в каждом приемнике выполнен сквозной паз для размещения одного из плеч этого рычага, а съемник выполнен в виде конусообразного паза расположенного
15 на плече рычага ловителя со стороны приемника, ось которого лежит в плоскости симметрии приемника.
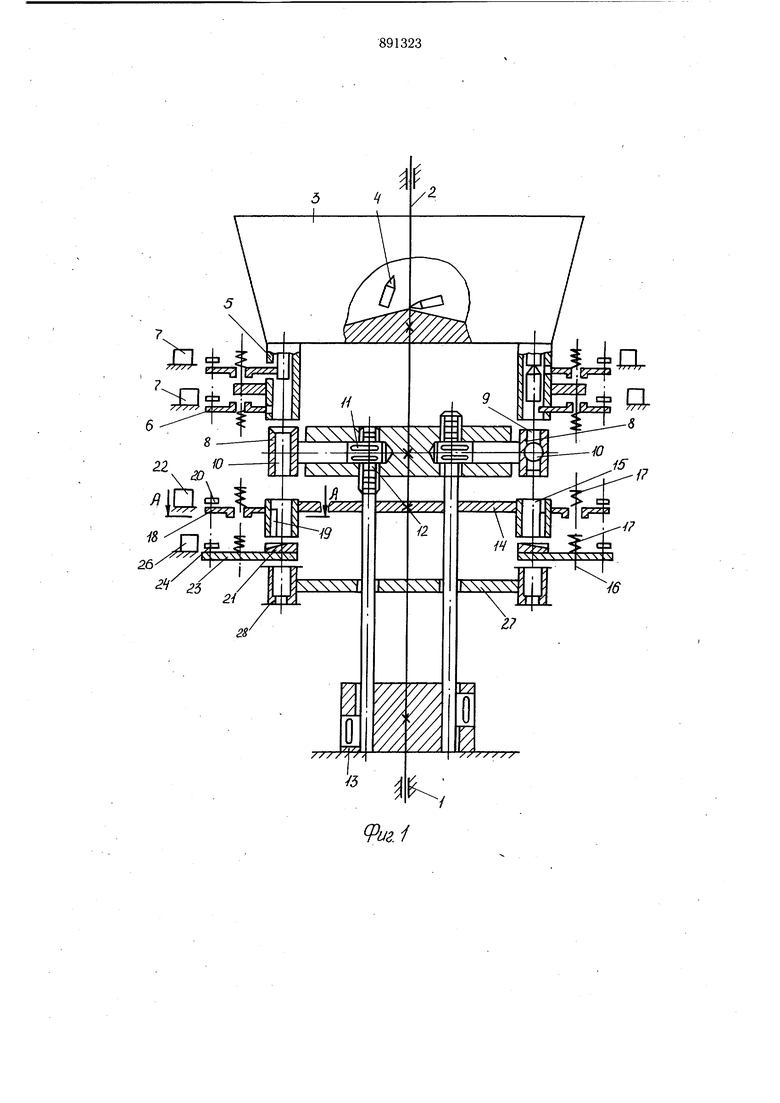
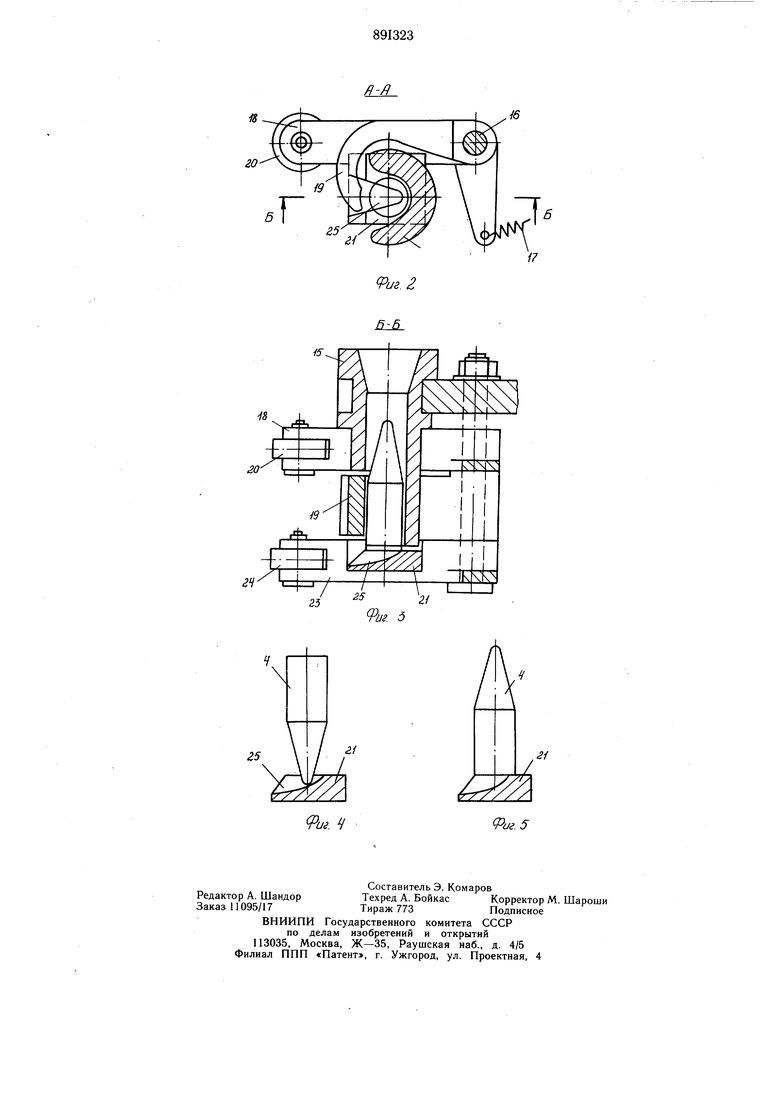
На фиг. 1 схематично изображен роторный автомат питания, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 20разрез Б-Б на фиг. 2; на фиг. 4 - положение неправильно ориентируемой детали на ловителе (вершинкой вниз); на фиг. 5 -
положение правильно ориентируемой детали (вершинкой вверх).
;Роторный автомат питания содержит станину 1, вал 2, на котором жестко закреплен, бункер 3, заполйенный подаваемыми деталями 4 и сообщенный с течками 5 через ворошители (не показаны), размещенными равномерно по окружности бункера 3. На выходе из каждой течки 5 установлены отсекатели 6 подаваемых деталей 4, которыми управляют неподвижные копиры 7. Под каждой течкой 5 помещ,ен механизм ориентации, выполненный в виде возвратно-поворотного цилиндра 8 с захватом 9 (в виде углубления) и сквознГым диаметральным отверстием 10, расположенным под углом к захвату 8. Цилиндр 8 имеет шестерню 11, входящую в зацепление с зубчатой рейкой 12, приводимой в возвратно-поступательное движение от неподвижного кругового копира 13.
Ниже механизма ориентации на валу 2 жестко посажен диск 14, в котором равномерно по окружности смонтированы приемники 15, выполненные в виде колец со сквозным пазом, и оси 16. На осях 16 установлены с возможностью поворота на определенный угол связанные пружиной 17 рычаги 18, несущие на свободных концах полукольцо 19 и ролик 20. Полукольцо 19 служит для удержания в приемнике 15 на ловителе 21 правильно и неправильно ориентированных деталей 4, а ролик 20 служит для периодического взаимодействия с кулачком 22, неподвижно закрепленным на станине 1. На оси 16 закреплен также рычаг 23, на, одном конце которого .закреплен ролик 24, а на втором - ловитель 21, выполненный в виде конусообразного паза 25, имеющим ширину меньше диаметра цилиндрической части детали. Управление рычагом 24 производится копиром 26, неподвижно закрепленном на станине 1. На валу 2 жестко посажена звездочка 27, которую охватывает цепь транспортная с втулками 28.
Роторный автомат работает следующим образом.
При вращении вала 2 приводятся в действие ворощители (не показаны). Одновременно приводятся в возвратно-поступательное движение рейки 12 от неподвижного кругового копира 13. Это движение, благодаря зубчатому зацеплению щестерен 11 с рейками 12, преобразуется в возвратно-поворотное движение цилиндров 8 механизмов ориентации. При этом подаваемые детали 4 поступают из бункера 3 в течки 5 предварительно ориентированными относительно своей вертикальной оси и проходят к механизмам ориентации. Поочредное поступление деталей 4 в механизмы ориентации происходит благодаря последовательному срабатыванию отсекателей 6 от копиров 7.
От механизмов ориентации детали 4 поступают в приемники 15, в которых правильно и неправильно ориентированные детали удерживаются полукольцом 19 и ловителем 21.
При вращении ротора поочередно ролик 20 каждого поворотного рычага 18 наезжает на кулачок 22 и, преодолевая усилие пружины 17 растяжения, поворачивает рычаг 18 с полукольцом 19 на определенный угол и
открывает свободную зону в приемнике 15, причем правильно ориентированные детали, расположенные вершинкой вверх, удерживаются ловителем 21 (диаметр цилиндрической части детали больще щирины конусообразного паза) и на участке передачи ролик 24 каждого поворотного рычага 23 с ловителем 21 наезжает на кулачок 22 и, преодолевая усилие пружины 17 растяжения, поворачивает рычаг 24 на определенный угол и ничем не удерживаемые детали под действием собственного веса падают во втулки (приемники)28 транспортной цепи, а неправильно ориентированные детали, расположенные вершинкой вниз, скользят под действием собственного веса по поверхности конусообразного паза 25 ловителя 21 и скатываются по лотку в сборник продукции. Такое выполнение устройства позволит ориентировать изделия типа конусных колпачков вершинкой вверх и удалять из потока конусные колпачки, ориентированные вершинкой вниз.
Формула изобретения
Роторный автомат питания для поштучной выдачи деталей типа конусных колпачков, содержащий механизмы вторичной ориентации, установленные в каждой позиции ротора, диск с приемниками, выполненными в виде колец, подпружиненные поворотные рычаги, несущие на концах ловители деталей, и съемник неправильно ориентированных деталей, отличающийся тем, что, с целью обеспечения удаления из потока неправильно ориентированных деталей, он снабжен дополнительными съемниками неправильно ориентированных деталей, установленными в каждой позиции ротора, а каждый приемник снабжен двуплечими рычагами, установленными с возможностью качания в горизонтальной плоскости, при этом в каждом приемнике выполнен сквозной паз для размещения одного из плеч этого рычага.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 564139, кл. В 23 Q 7/02, 1977.
9uz.i
Г
г5г
/5
/5
yl5
%. 5
21
/.
