ФиеЛ
Изобретение относится к строительству, может быть использовано для перегрузки деталей, или укладки штучных грузов, а также для укладки кирпичей и является усовершенствованием изобретения по авт.св. № 1266731.
Цель изобретения - повышение качества кладки.
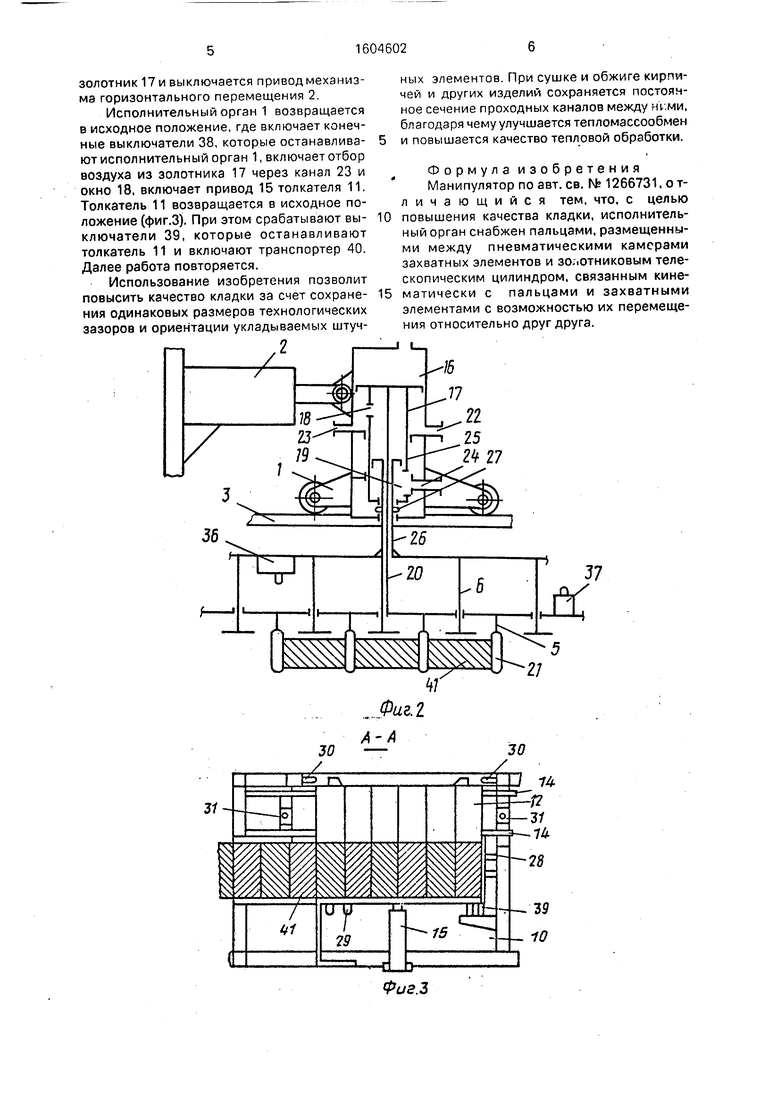
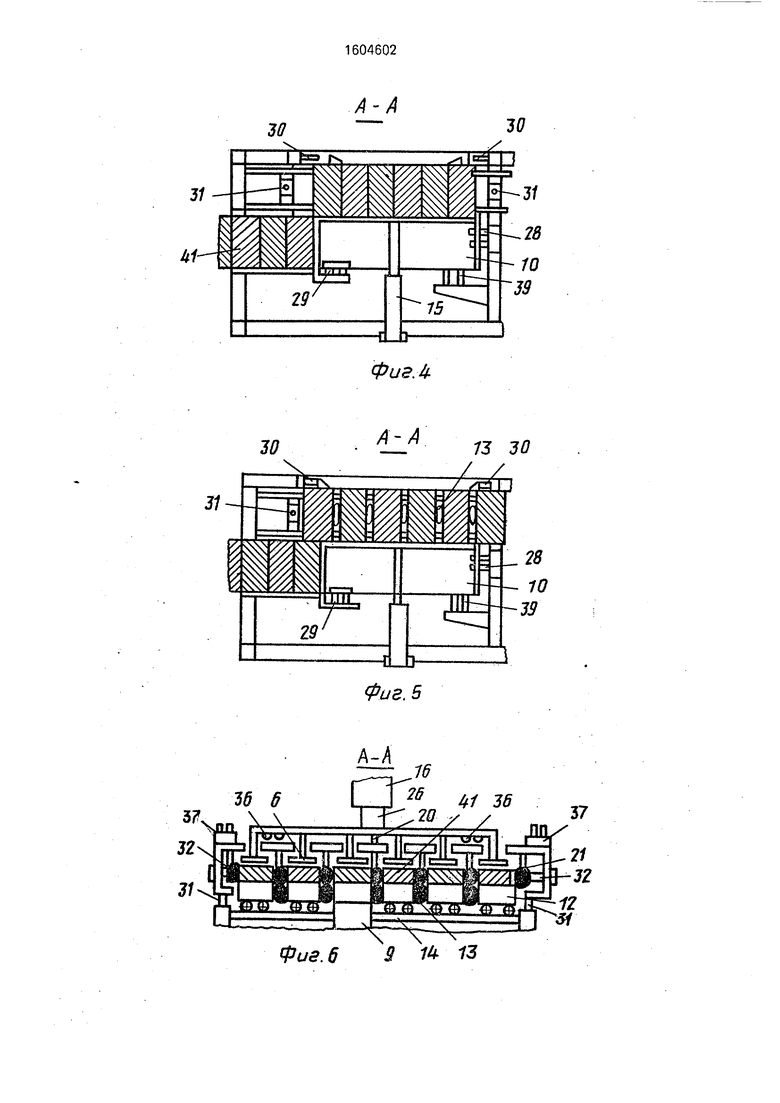
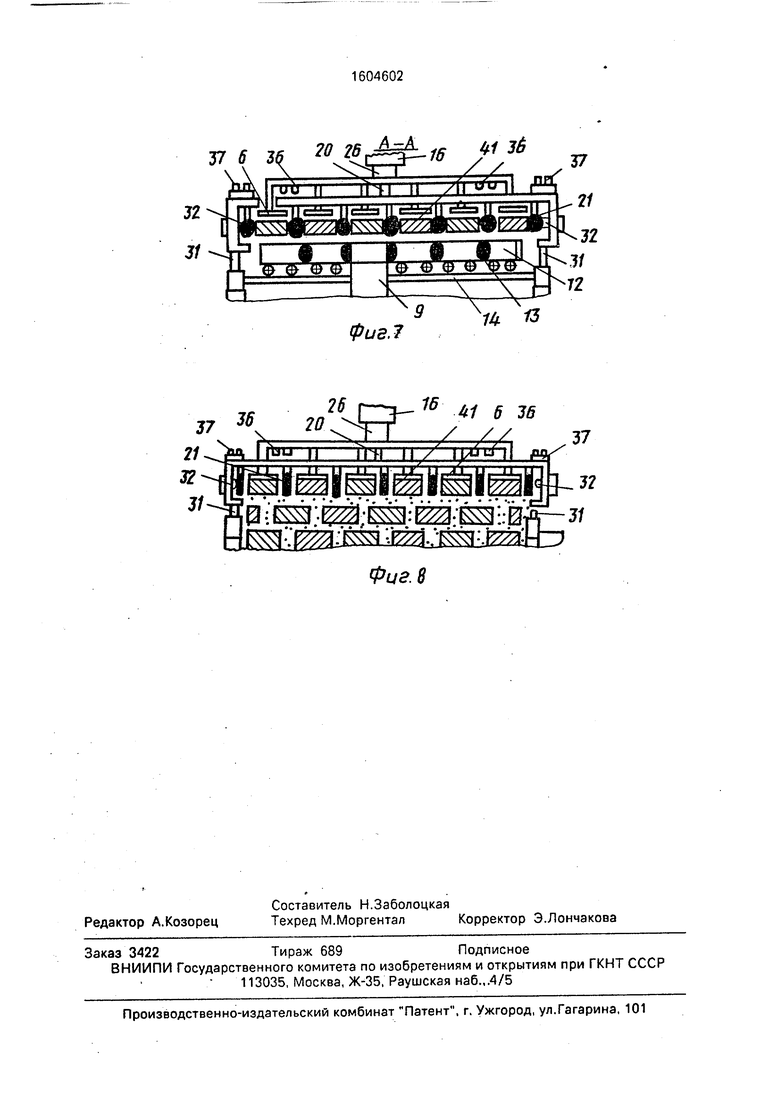
На фиг.1 изображен манипулятор; на фиг. 2 - золотниковый телескопический цилиндр с пальцами и захватными элементами; на фиг. 3-сечение А-А на фиг. 1 ;на фиг. 4-то же, с выдвинутым толкателем; на фиг. 5 - то же, с раздвинутыми каретками; на фиг. 6 - то же, при захвате штучных элементов; на фиг. 7то же, при подъеме штучных элементов и сближении кареток: на фиг. 8 -укладка штучных элементов.
Манипулятор содержит исполнительный орган 1 с механизмом 2 горизонтального перемещения, с помощью которого он перемещается по рельсам 3, смонтированным на верхней части рамы 4. Исполнительный орган 1 состоит из захватных элементов 5 и пальцев 6 с механизмами подъема 7 и опускания 8. Перегружатель 9 состоит из приемной платформы 10 под штучные элементы, толкателя 11 для перемещения штучных элементов с приемной платформы
10на каретки 12, связанные между собой пневмокамерами 13. Каретки 12 перемещаются по направляющим 14, а толкатель 11 перемещается посредством привода 15 по приемной платформе 10. Исполнительный орган 1 снабжен золотниковым телескопическим цилиндром 16 с золотником 17 с верхним 18 и нижним 19 окнами. Надзолот- никовая полость Цилиндра 16 сообщается с атмосферой, а золотник 17 посредством штока 20 связан с захватными элементами, содержащими пневмокамеры 21. В стенке цилиндра 16 сделаны верхние 22 и 23 и нижние 24 каналы. В золотнике 17 расположен поршень 25 со штоком 26, посредством которого он связан с пальцами 6. Поршень 25 опирается на пружину 27. Конечные выключатели 28-39 управляет работой манипулятора.
Манипулятор работает следующим образом.
Транспортером 40 кирпичи 41 подаются на приемную платформу 10 (фиг. 3). Впереди идущий кирпич нажимает на выключатель 28: останавливает транспортер 40 и включает привод 15 толкателя 11. Толкатель
11подает кирпичи на каретки 12 и нажимает на конечный выключатель 29. Выключатель отключает привод 15, останавливая толкатель 11 и включает подачу воздуха в пневмокамеры 13 кареток 12. Пневмокамеры,
наполняясь, раздвигают -каретки 12, образуя технологические зазоры между кирпичами 41. Крайние каретки включают через выключатели 30 механизмы 7 и 8 опускания
захватных элементов 5 и пальцев 6. При срабатывании механизмов опускания производятся отбор воздуха из цилиндра 16 через верхний канал 22 и снижение давления под золотником 17. Золотник 17 и пор0 шень25 опускаются. Пружина27 поднимает
пальцы 6 над пневмокамерами 21 захватных
элементов и позволяет последним свободно
опускаться между кирпичами 41 (фиг.2).
Захватные злементы 5 после опускания
5 включают конечные выключатели 31: прекращается отбор воздуха из цилиндра 16 (прекращается опускание), включается подача воздуха в пневмокамеры 21 и захватные элементы схватывают кирпичи 41 и
0 включают конечные выключатели 32, которые отключают подачу воздуха в пневмокамеры 21 и включают подачу воздуха в цилиндр 16 через канал 22. Создается давление под головкой золотника 17 и послед5 НИИ поднимает захватные элементы 5 и пальцы 6. Захватные элементы действуют на конечный выключатель 33: отключают подачу воздуха в цилиндр 16 и включают привод механизма 2 горизонтального пере0 мещения (фиг.1), который перемещает кирпичи к месту их укладки. На месте укладки кирпичей исполнительный орган 1 нажимает на конечные выключатели 34, которые останавливают исполнительный орган 1,
5 включают отбор воздуха из цилиндра 16 через канал 22.
Золотник 17 опускается и кирпичи опираются о поверхность кладки. Захватные элементы 5 включают конечные выключате0 ли 35: отбирается воздух из пневмокамер 21, подается воздух в золотник 17 через верхний канал 23 и верхнее окно 18. Воздух оказывает давление на поршень 25 и через шток 26 передает давление на пальцы 6,
5 сжимает их и прижимает к кирпичам 41 (фиг.8), после чего давлением воздуха поднимается золотник 17 и поднимает пневмокамеры 21 между кирпичами 41. Захватные элементы 5 поднимаются над кирпичами и
0 включают конечный выключатель 36, который отключает подачу воздуха в золотник 17 и включает подачу воздуха в цилиндр 16 через нижний 24 и верхний 22 каналы. Воздух через канал 24 и окно 19 входит в золот5 ник 17 и создает давление под поршнем 25, поднимая пальцы 6 над кирпичами. Пальцы 6 отходят от выключателей 36, а захватные элементы 5 поднимаются до конечных выключателей 37 и включают их. Этим отключается подача воздуха в цилиндр 16 и
золотник 17 и выключается привод механизма горизонтального перемещения 2.
Исполнительный орган 1 возвращается в исходное положение, где включает конечные выключатели 38, которые останавливают исполнительный орган 1, включает отбор воздуха из золотника 17 через канал 23 и окно 18, включает привод 15 толкателя 11. Толкатель 11 возвращается в исходное положение (фиг.З). При этом срабатывают выключатели 39, которые останавливают толкатель 11 и включают транспортер 40. Далее работа повторяется.
Использование изобретения позволит повысить качество кладки за счет сохранения одинаковых размеров технологических зазоров и ориентации укладываемых штуч/
.
1
0
5
ных элементов. При сушке и обжиге кирпичей и других изделий сохраняется постоянное сечение проходных каналов между И1,ми, благодаря чему улучшается тепломассообмен и повышается качество тепловой обработки.
Формула изобретения Манипулятор по авт. св. Мг 1266731, о т- личающийся тем, что, с целью повышения качества кладки, исполнительный орган снабжен пальцами, размещенными между пневматическими камерами захватных элементов и зо/ютниковым телескопическим цилиндром, связанным кинематически с пальцами и захватными элементами с возможностью их перемещения относительно друг друга.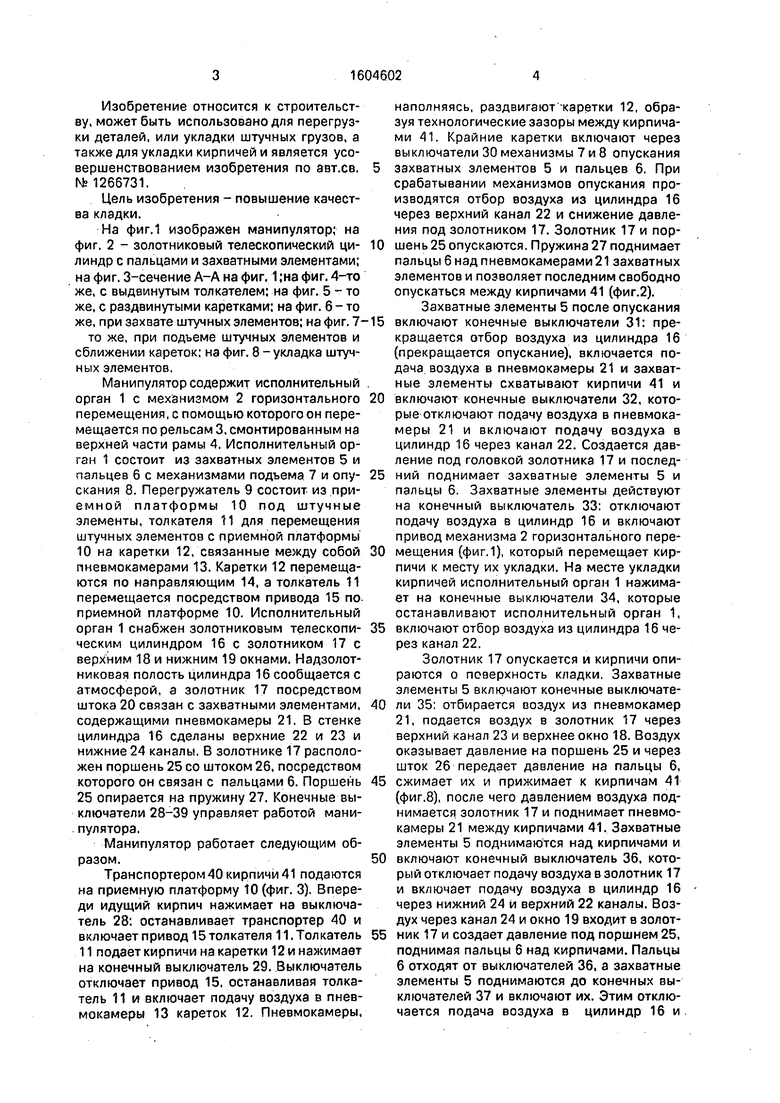
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1266731A1 |
| Манипулятор | 1987 |
|
SU1502295A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Машина для кладки кирпича | 1974 |
|
SU962551A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Машина для кладки кирпича | 1983 |
|
SU1135890A2 |
| Укладчик-разгрузчик керамических изделий | 1988 |
|
SU1698068A1 |
| Манипулятор для кладки кирпича | 1990 |
|
SU1767131A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1324929A1 |
Изобретение относится к строительству и может быть использовано для перегрузки деталей или укладки штучных грузов, а также для укладки кирпичей на сушила и поддоны для сушки и обжига. Цель изобретения - повышение качества кладки. Манипулятор содержит исполнительный орган 1 с механизмом 2 горизонтального перемещения, с помощью которого он перемещается по рельсам 3, смонтированным на верхней части рамы 4 манипулятора. Исполнительный орган 1 состоит из захватных элементов 5 и пальцев 6 с механизмами 7 и 8 подъема и опускания соответственно. Перегружатель 9 состоит из приемной платформы 10 под штучные элементы, толкателя 11 для перемещения штучных элементов с приемной платформы 10 на каретки 12, которые связаны между собой пневмокамерами 13. Каретки 12 перемещаются по направляющим 14, а толкатель 11 перемещается посредством привода 15 по приемной платформе 10. Исполнительный орган 1 снабжен золотниковым телескопическим цилиндром 16, в котором установлен золотник с верхним и нижним окнами. Надзолотниковая полость цилиндра 16 сообщается с атмосферой, а золотник посредством штока связан с захватными элементами, содержащими пневмокамеры 21. В стенке цилиндра 16 сделаны верхние и нижние каналы. В золотнике расположен поршень со штоком, посредством которого он связан с пальцами 6. Поршень опирается на пружину. Конечные выключатели 32 - 38 управляют работой манипулятора. 8 ил.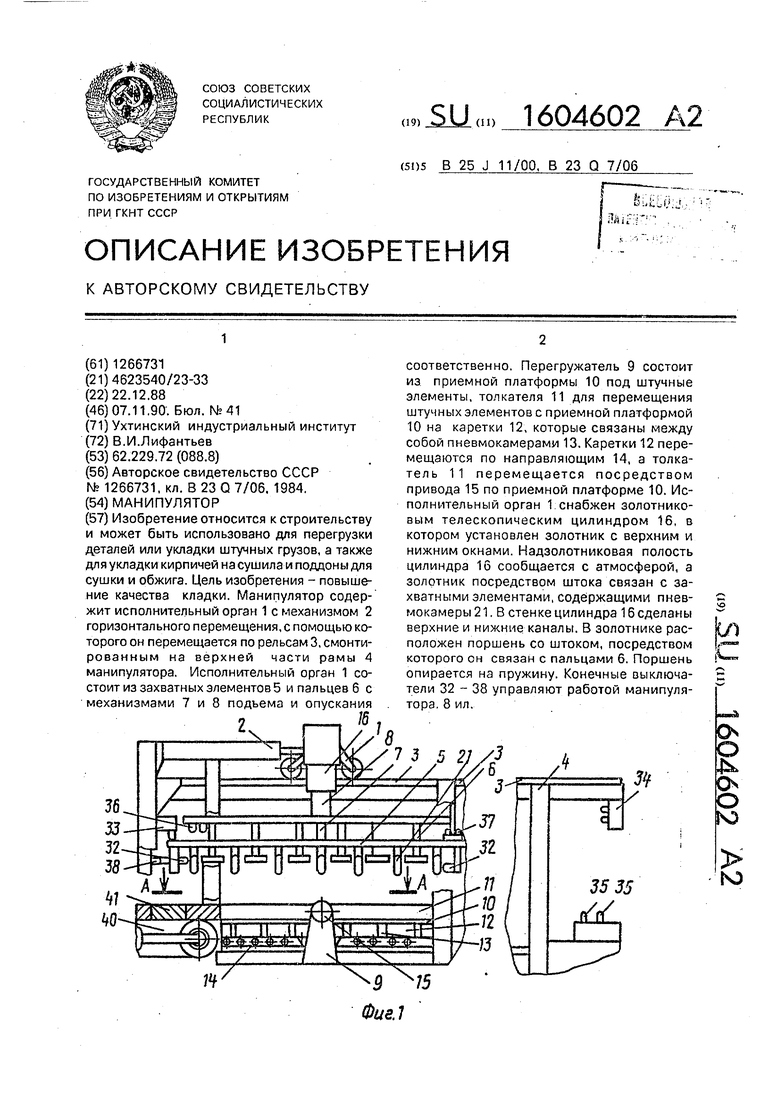
Фиг.З
ISO
3
J/
Фие. 6
/I-/I
фиг л
А- А -Г73 30
/ /
Фиг, 5
37
/
31
1 13
37 36
« .-Х-Хфив.7
,,;4F - / -/-7/ 1ГЬц и м X )л 1 м
J7 Jff
VI г М II Тм Тут . л t III
0: Ш;.
Фиг. в
37
/Д
37
3 Л
| Манипулятор | 1985 |
|
SU1266731A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
