i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1266731A1 |
| Манипулятор | 1988 |
|
SU1604602A2 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ, ОБЖИГОВАЯ МНОГОЩЕЛЕВАЯ ШАХТНАЯ ПЕЧЬ ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И СУШИЛЬНАЯ КАМЕРА ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2046708C1 |
| Устройство для извлечения изделий из тары | 1983 |
|
SU1296481A1 |
| Укладчик-разгрузчик керамических изделий | 1988 |
|
SU1698068A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Устройство для укладки огнеупорныхиздЕлий HA пЕчНОй ВАгОН | 1978 |
|
SU814758A1 |
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для перегрузки деталей, и может быть использовано при строительстве кирпичных зданий и сооружений, а также при производстве кирпичей и других штучных элементов. Целью изобретения является повышение производительности за счет сокращения времени рабочего цикла. Это достигается тем, что установка направляющей 5 кареток 4 с размещенными на них захватными элементами 3 на исполнительном органе позволяет совместить по времени как перемещение и подъем исполнительного органа, так и образование технологических зазоров между каретками 4. 4 ил.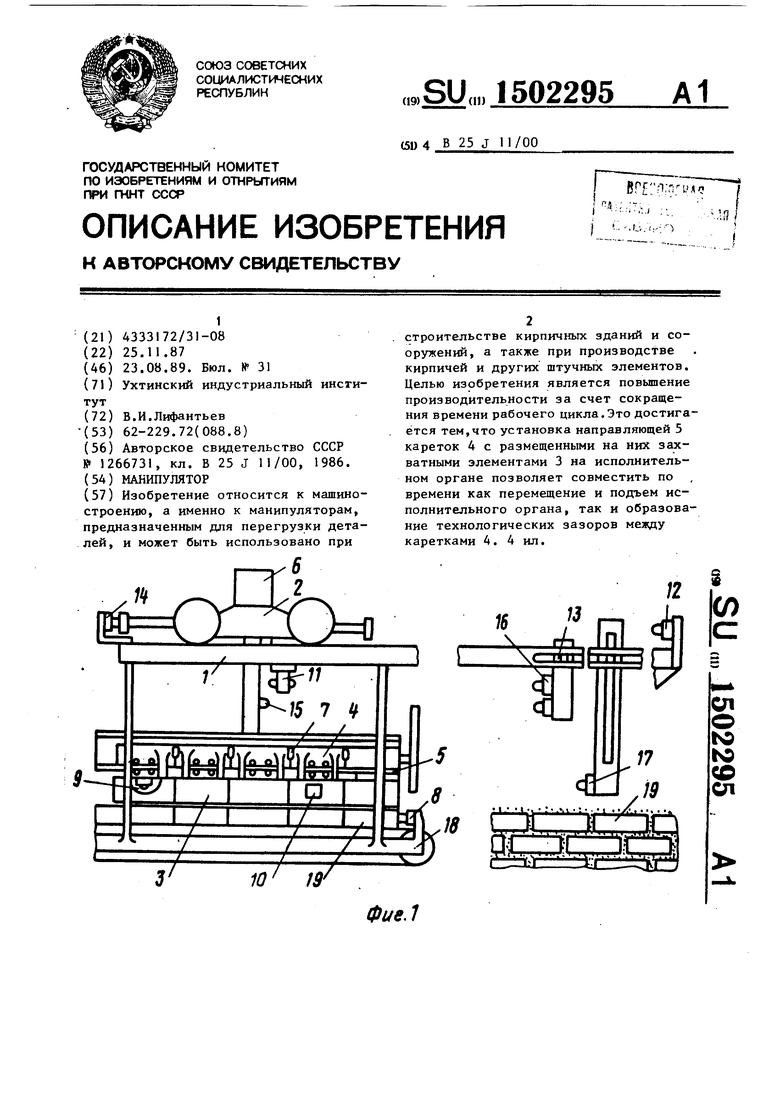
10 19
ел о to ю
ел
ФиеЛ
315
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для перегрузки деталей, и может быть использовано при создании манипуляторов, устанавливаемых на строительстве кирпичных зданий, сооружений, а также при производстве кирпичей и других штучных элементов.
Цель изобретения - повышение производительности манипулятора путем сокращения времени рабочего цикла.
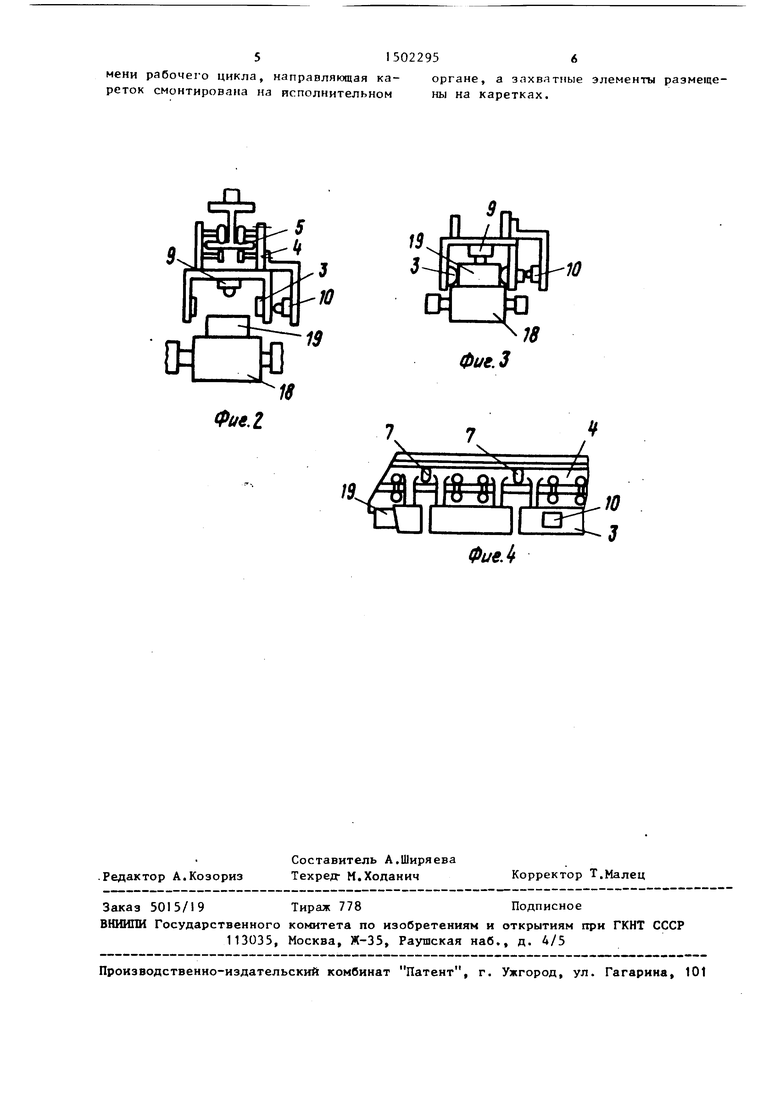
На фиг.1 представлен манипулятор, общий вид; на фиг.2 - каретки с захватными элементами над изделием пере опусканием исполнительного органа; на фиг.З - захватный элемент, при захвате изделия; на. фиг.А - одновременные подъем, перемещение и образование технологических зазоров.
Манипулятор содержит основание 1, выполненное в виде рамы, размещает на себе тележку 2 с исполнительным органом, состоящим из захватных элементов 3, выполненных в виде пневматических камер, установленных на каретках 4, которые установлены на направляющей 5, связанной с механизмом 6 подъема исполнительного органа. Каретки 4 связаны между собой пнев- мокамерами 7. Для управления манипулятором предусмотрены переключатели 8 - 14 и кулачки 15-17 (фиг.1).
Манипулятор работает следующим образом.
Транспортером 18 штучные элементы 19, например кирпичи, поступают к манипулятору. Впереди идущий штучный элемент 19 доходит до переключателя 8 и путем нажатия на него выключает транспортер 18 и включает привод 6 подъема исполнительного орг гана на опускание (фиг.2). Исполнительный орган опускается, охватывает захватными элементами штучные изделия. При дальнейшем опускании включается переключатель 9 для подачи .. воздуха в пневматические камеры захватных элементов 3. Пневматические камеры захватных элементов 3, раздут ваясь, зажимают охваченные штучные элементы 19. Продолжая раздуваться после захвата штучных элементов 19, одна из пневматических камер выходит
из окошка и включает механизм 6 подъема исполнительного органа на подъем переключателем 10. После того как изделие поднимается над транс
портером 18, включается кулачком 15 переключатель 11 привода тележки 2 и подачи воздуха в пневмокамеры 7 (фиг.4). Пневмокамеры 7, раздуваясь, раздвигают каретки 4, образуя технологические зазоры (фиг.4) между штучными элементами 19 одновременно с подъемом и перемещением элементов 19.
Тележка 2 подкатывается к месту укладки штучных элементов 19, которое определяется местом расположения ку- ла чка 16 и переключателя 12. Переключатель II касается кулачка 16 и выключает привод тележки 2. Одновременно с касанием переключателя 11 кулачка 16 исполнительный орган переключатель 12 на опускание исполнительного органа. Исполнительный орган опускает штучные элементы 19 на место укладки, котррое определяется положением кулачка 17. Переключатель 10 прижимается к кулачку 17 и воздух выпускается из пневматических Камер захватных элементов 3, освобождая штучные элементы 19. После спуска воздуха из пневматических камер . захватных элементов 3 включается переключатель 10 на подъем исполнительного органа. Кулачок 15 включает переключатель 13, от которого одновременно подаются команды на выключение привода подъема исполнительного органа, выпуск воздуха из пневматических камер 7 и включение привода тележки 2 на возвращение ее в исходное положение. Тележка 2 подкатывается к месту захвата манипулятора штучных элементов 19, действует на переключатель 14, отключает привод тележки 2 и включает транспортер 18. После этого цикл повторяется.
I Формулаизобретения
Манипулятор, содержащий основание в виде рамы, на верхней части которой установлен с возможностью перемещения исполнительный орган с захватными элементами в виде пневматических камер, привод подъема исполнительного органа, каретки, установленные на направляющей и связанные между собой пневматическими , камерами, отличающий с я тем, что, с целью повьщ1ения производительности за счет сокращения врё515022956
мени рабочего цикла, направляющая ка- органе, а захватные элементы раэмеще- реток смонтирована на исполнительном ны на каретках.
(5 3
п ;пт-,
D:
Фие.З
| Манипулятор | 1985 |
|
SU1266731A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
