Изобретение относится к машиностроению и автоматизации, в частности к конструкциям манипуляторов, предназначенных для перегрузки деталей, и может быть использовано при создании манипулятора, устанавливаемого на строительстве кирпичных зданий и сооружений. Целью изобретения является расширение технологических возможностей за счет схватывания деталей уложенных вплотную и укладки их в ряд с за зором. На фиг.1 изображен манипулятор, общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.3 - то же, с выдвинутым толкателем; на фиг.4 - то же, с раздвинутыми каретками; на фиг.5 то же, при захвате деталей; на фиг.6 подъем захватных элементов с деталями и сближение кареток; на фиг.7 - укладка деталей. Манипулятор содержит исполнительный орган 1 с механизмом горизонталь ного перемещения 2, с помощью которо го он перемещается по рельсам 3 смонтированным на верхней части рамы А. Исполнительный орган 1 состоит из руки 5 с захватными элементами 6 с механизмом подъема и опускания 7 захватных элементов 6. Перегружатель 8 состоит из приемной платфор. мы 9 ПОД кирпичи, толкателя 10 ,цля перемещения кирпичей с приёмной платформы 9 на каретки 11, которые связаны между собой пневмокамерами 12. Каретки 11 перемещаются по направляющим 13, а толкатель 10 переме щается посредством привода 14 по приемной платформе 9. Конечные выкл чатели 15-25 и размыкатель 26 включают механизмы и пневмокамеры. Зах ватные элементы 6 выполнены в виде пневматических пневмокамер. Манипулятор работает следующим образом. Рассмотрим работу манипулятора применительно к случаю кирпичной кладки. Транспортером 27 кирпичи 28 пот даются на приемную платформу 9 (фиг.2), при этом срйбатывает конеч ный выключатель 15: останавливает транспортер 27 и включает привод 14 толкателя. Толкатель 10 подает кирпичи на каретки 11, конечный выклю1:чатель 16 останавливает толкатель 10 и включает пневмокамеры 12 (фиг.З), которые раздвигают каретки 1I, и разделяют кирпичи 28 (фиг.4), при этом срабатывают конечные выключатели 17, которые включают механизм подъема и опускания 7 захватных элементов 6. Рука 5 опускается, и захватные элементы 6 проходят между кирпичами 28, при этом срабатывают конечные выключатели 18, останавливается механизм опускания 7 руки 5 и подается воздух в захватные элементы 6, которые расширяются и схватывают кирпичи 28 (4мг.5). Затем включаются конечные выключатели 19, которь;е отключают подачу возду са в камеры захватных элементов 6 и включают механизм подъема и опускания 7 руки 5 и сближают каретки II (фиг.6). Конечные выключатели 20 отключают механизм подъема и опускания 7 руки и включают механизм горизонтального перемещения 2 исполнительного органа 1, которая перемещается по рельсам 3 к месту укладки кирпича. На месте укладки кирпича срабатывают конечные выключатели 21, которые останавливают исполнительный орган 1 и вк,точают механизм подъема и опускания 7 руки. Рука 5 опускается, затем срабатывают конечные выключатели 22, которые останавливают механизм опускания 7 руки и освобождают кирпичи 28 (фиг.7). При этом через размыкатель 26 срабатывает конечный выключатель 23, который включает механизм подъема и опускания 7, и рука 5 поднимается. При окончании подъема размыкатель 26 касается направляющей (не показана) и отключает конечный выключатель 23. Одновременно с включается конечный выключатель 21 привода механизма горизонтального перемещения 2, и исполнительный орган 1 возвращается в исходное положение, при этом срабатывают конечные выключатели 20 и 24. Первые из них останавливают исполнительный орган I и отключают выключатель 23, второй подает команду на привод 14 толкателя, и толкатель 10 возвращается в исходное положение (фиг.2). При этом срабатывают конечные выключатели 25, которые останавливают толкатель 10 в исходном положении и включают транспортер 27. Далее работа повторяется.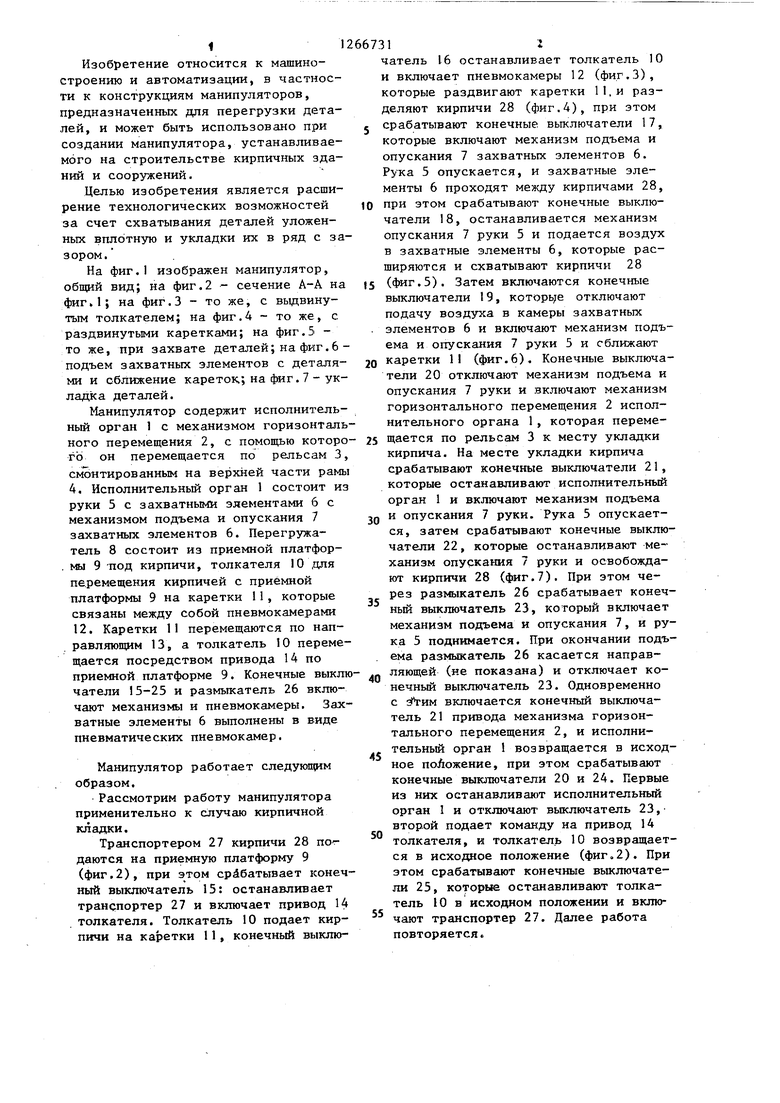
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1604602A2 |
| Манипулятор | 1987 |
|
SU1502295A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Агрегат для резки листового проката | 1982 |
|
SU1046043A1 |
| Устройство для подачи листа в зону обработки | 1985 |
|
SU1357108A1 |
| Захватный орган манипулятора | 1978 |
|
SU778876A1 |
| Устройство для укладки штучных изделий в пакет | 1988 |
|
SU1643368A1 |


МАНИПУЛЯТОР, содержащий основание, вьтолненное в виде рамы, на верхней части которой установлен с возможностью перемещения исполнительный орган с захватными элементами, размещенными на одинаковом расстоянии один относительно другого, а на нижней части рамы смонтирован перегружатель, имеющий приемную платформу,о тлич ающийс я тем, что, с целью расширения технологических возможностей, он снабжен каретками, связанными между собой пневматическими камерами и установленными на направляющих, смонтированных на нижней части рамы вдоль приемной платформы, и толкателем, установленным с возможностью перемещения в направлении, перпендикулярном к направляющим кареток, а захватные элементы выполнены в виде пневматических камер, причем рабочие поверхности кареi ток и приемной платформы расположены (Л в одной плоскости.
5 S
n/n X
;
Л.у4ч aCi
I j..
- gV
LJ ..3 1 /
2Z 26
Vu.B
Дс/г.7
12 11
.23 26
| Устройство для перегрузки изделий | 1984 |
|
SU1217624A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
