1-. - ; . -,. .
(21)4835647/33 ; .. ; . ;. /,Г
(22) ЬЗ.05.90
(46)07.10.92. Бюл.Мг 37... %f
(71)Московское научно-производственнре объединение по строительному и дорожному машиностроению ВНИИстройдормаш1 и Московский инженерно-строительный институт им. В.В.Куйбышеву; -, , ,:,;;
(72)Е.А.Элер, Е.Ю.МалинЬвский и А.А.Бор- щевский. , ь -- л
(56)Авторское свидетельство СССР , .-;. № 1712561, кл.Е 04 G.21/22, 1991. , . (54) МАНИПУЛЯТОР ДЛЯ КЛАДКИ КИРПИЧА- ; ; , ,/ ., , ,.. ;..
(57)Использование: относится к устройствам для обеспечения механизации иавтома- тизации каменных работ, Сущность изобретения: манипулятор для кладки кирпича содержит направляющие с,кареткой. На последней закреплены рабочий орган с насадками, механизм шагового перемещения и силовые цилиндры подъема, опускания и пбворота рабочего органа. К насадкам
OW ч. .й
j:. .|: .. ... ..
подключен материалопровод для подачи раствора от системы, В материапопроводе размещен поршень, Последний имеет привод ПёремещенШ в виде дв ух гйдроцйлйнд- ров, Посредством гидрораспредёлйте ля соответствующие полости гидроцилйндров сообщены. Один из гйдроц иЛйндрЬв закреплен на каретке и боединё н UitoKSM d механизмом шагового перемещения. Другой гидроцилиндр закреплен н матёриа- лопроводе и выполнен с rfb/iUM штоком. Последний соедине н содной сУброны с р ас- положенным в ма териалЬпрЬвбдё пЬршнем, а с другой с системой пбдачй;рас У8ра. Кроме того, привод пёрёмещёнй я Ьнаб: жен дополнител ьным :гйдроцил индром и установлен закреплённому ;на каретке основному гидроцилиндру. Соответствующие полости этих гидроЦилйндрбв сЪёдйнень) С; помощью допоЛНител БНого гйдрораспредё- литеЛя. Штоки ocMbBH6rqH SrrpflHMte|iibH - го гидроцийиндрбв жёстко св язаны м ежду собой. 1 з.па. ф-лы, 1 йл. . ;
Ё

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Манипулятор | 1988 |
|
SU1604602A2 |
| Установка для кладки кирпичных стен | 1988 |
|
SU1631151A1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИНЫ БЕЗ ВЫЕМКИ ГРУНТА | 2020 |
|
RU2757612C2 |
| Устройство для очистки вагонных колесных пар | 1987 |
|
SU1414685A1 |
| Установка для изготовления составных строительных блоков | 1974 |
|
SU604946A1 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| Грунтопрокалывающая установка | 1984 |
|
SU1218002A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
Изобретение относится к строительству, а именно к механизации и автоматизациикаменных раббт
Наиболее близким по технической сущности и достигаемому результату является манипулятор для кладки кирпича, содержащий направляющие с кареткой и закрепленными на ней рабочим органом с насадками, механизмом шагового перемещения и силовыми цилиндрами подъема, опускания и поворота рабочего органа, через которые пропущен материалопровод для подачи раств ора к йасадкам, и систему подачи рас твора 1.---.
Недостатком данного манипулятора является отсутствие сйнхронйз ации . выдачи раствора с перемещением рабочего органа, что не обеспечивает равнЬмерную уклёдку на Кйр пич пбсТёлй из раствора и требует применения для этого специальных приспособлений.: 4|
Цель изобретения - расширение техно- логичёс(сих возмржнрбтей за счет рбеспече- ни я ;сйНхрЬнизацйй подачи раствора из насадков с перемещением рабочего органа.
Поставленная цель дрстйгается тем, что манйпулятор для клЬдки кирпича, содержащий направляющие с кареткой и закрепленVJ
О
VI
CJ
ными на ней рабочим органом с насадками, механизмом шагового перемещения и поворота рабочего органа, через которые пропущен материалопровод для подачи раствора к насадкам, и систему подачи раствора, снабжен размещенным в материалопрово- де поршнем и приводом его перемещения, выполненным в виде двух гидроцилиндров, соответствующие полости которых сообщены между собой посредством гидрораспре- делитёл я, при этом один из гидроцилиндров закреплён на каретке и соединен u/током с механизмом шагового перемещения, а другой гидроцилиндр - на.материалопроводе и выполнен с полым штоком, который соединен с одной стороны с расположенным в материалопроводе поршнем, а с другой стороны с системой подачи раствора. При этом привод перемещения поршня снабжен дополнительным гидроцилиндром, установленным параллельно закрепленному на каретке основному гидроцилиндру, и дополнительным гидрораспределителем, соединяющим соответствующие полости этих гидроцилиндров, штоки которых жестко связаны между собой.
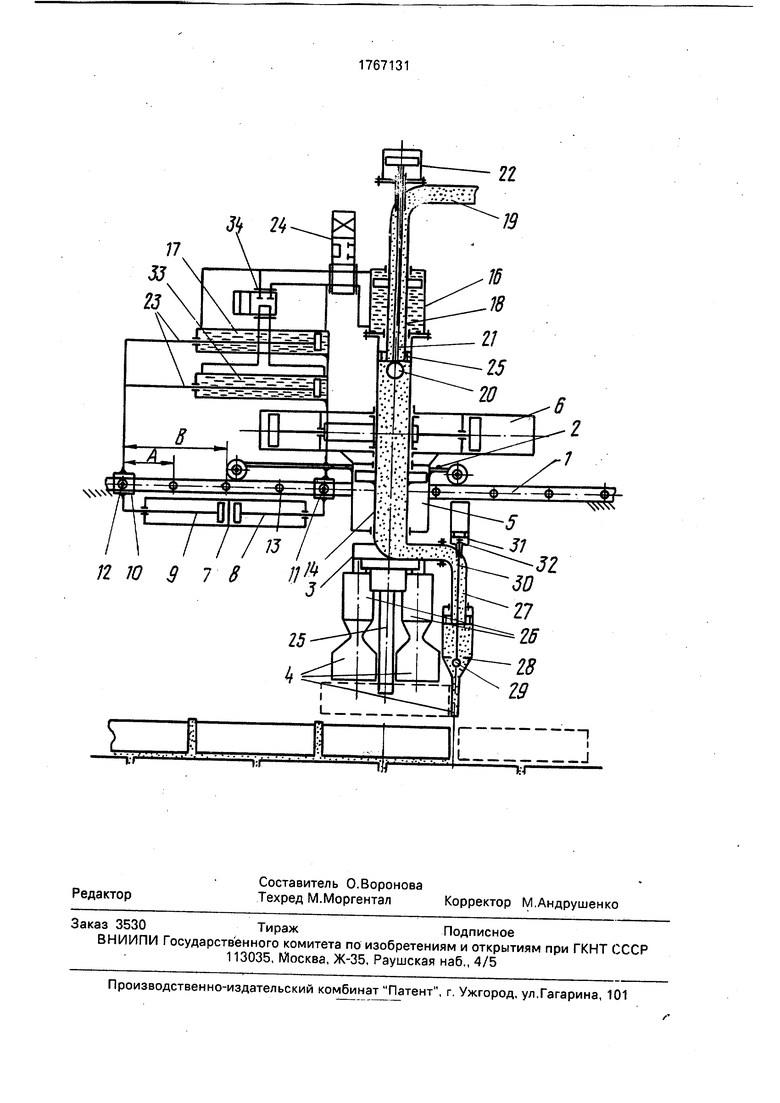
Сущность изобретения поясняется схемой манипулятора для кладки кирпича, представленной на чертеже.
Манипулятор состоит из направляющих 1, на которых размещена каретка 2 с закрепленными на ней рабочим органом 3 с насадками 4, механизмом 5 осевой подачи, механизмом 6 поворота рабочего органа 3 в виде силовых цилиндров и механизмом шагового перемещения каретки 2 по направляющим 1, включающим силовой сдвоенный цилиндр 7, шток 8 которого закреплен на каретке 2, а шток 9 закреплен на ползуне 10, расположенном на направляющей 1. Карет- .ка 2 и ползун 10 снабжены фиксирующими элементами 11 и 12, размещенными вотвер- стиях 13 направляющей 1, выполненных с шагом, равным минимальному шагу укладки кирпича А. Изменение шага перемещения каретки осуществляется за счет сдвоенного цилиндра 7 путем включения в работу одного или обоих штоков 8 или 8 и 9. К насадкам 4 от системы подачи раствора подведен материалопровод 14, в котором расположен поршень 15 подачи смеси, связанный с приводом, включающим гидроцилиндр 16 и гидроцилиндры 17. Гидроцилиндр 16 жестко закреплен на материалопроводе, а его полый шток 18 жестко связан с поршнем 15 с одной стороны, соединен с трубопроводом 19 системы подачи раствора с другой и снабжен клапаном 20. связанным посредством жесткого стержня 21 с приводом, выполненным в виде цилиндра 22, жестко закрепленного на штоке 18.
Гидроцилиндр 17 жестко или шарнирно закреплен на каретке 2 параллельно на5 правляющим 1, а его шток 23 закреплен на ползуне 10. Полость гидроцилиндра 17 посредством гидрораспределителя 24 связана с соответствующей полостью гидроцилиндра 16.
10Рабочий орган 3 включает устройство 25
для захвата кирпича и три устройства для укладки раствора, включающие цилиндры 26 с плоскими насадками 4, связанными посредством полых штоков 27 с полостью
15 материалопровода 14. Три - этом минимальное количество унифицированных устройств, обеспечивающих укладку раствора при различных схемах укладки кирпича. Цилиндры 26 снабжены решетчатыми диаф0 рагмами 28 и клапанами 29, связанными посредством стержней 30 с приводами 31, причем на диафрагме 28 и входном отверстии плоского насадка 4 имеются седла клапана 29. Поршень привода 31 снабжен
5 пружиной 32, обеспечивающей поднятие клапана 29 до упора в диафрагму при снятии давления в цилиндре привода 31.
Кроме того, привод перемещения поршня 15 манипулятора снабжен дополнитель0 ным гидроцилиндром 33, установленным параллельно закрепленному на каретке 2 основному гидроцилиндру 17, и дополнительным гидрораспределителем 34, соединяющим соответствующие полости
5 гидроцилиндров 17 и 33, штоки которых 23 и 35 жестко связаны между собой.
Работа манипулятора осуществляется следующим образом.
В исходном состоянии направляющие 1
0 располагаются вдоль стены, каретка 2 находится в позиции уложенного ранее кирпича, ее фиксатор 11 отключен, а ползун 10 находится в ближайшем к ней положении и зафиксирован фиксатором 12, захват 25
5 открыт, насадки 4 подняты, рабочий орган 3 находится в верхнем положении. Гидрораспределитель 24 находится в нейтральной позиции Н, а гидрораспределитель 34 в позиции Л, (если осуществляется укладка кир0 пичей ложковой гранью вдоль стены), обеспечивающих замыкание противоположных полостей гидроцилиндров 17 и 33. Рабочий цикл начинается с перемещения каретки 2 в следующую позицию, осу5 ществляемого выдвижением обеих штоков 8 и 9 силового цилиндра 7. Одновременно с этим с помощью механизма 6 поворота осуществляется ориентация рабочего оргапз 3 в положение загрузки кирпича. После завер- шения перемещения каретки 2 осуществляется фиксация фиксатором 11, освобождение от фиксации ползуна 10 и переключение гидрораспределителя 24 в позицию П, обеспечивающую подключение соответствующих полостей гидроцилиндров 17 и 33 к гидроцилиндру 16 в прямом направлении.
Затем осуществляется загрузка рабочего органа 3 кирпичом и необходимой порцией растворной смеси.
Загрузка кирпича осуществляется вспомогательным манипулятором (не показан), установленным на каретке, путем подачи кирпича в захват 25. Для загрузки растворной смеси с помощью привода 22 открывается клапан 20, в ползун 10 перемещается с помощью силового цилиндра 7 на одну позицию в сторону каретки 2. При этом под действием штока 23 рабочая жидкость из гидроцилиндра 17 поступает в гидроцилиндр 16 и перемещает поршень 15 вверх. Одновременно с этим клапан 29 с помощью привода 31 и стержня 30 отжимается вниз, открывает отверстие 27, упирается в седло, расположенное на входе в насадок 4, и перемещает его вместе с цилиндром 26 вниз. Растворная смесь под действием давления в системе подачи раствора и подсоса, создаваемого в результате перемещения поршней 15 и цилиндра 26, заполняет полость материалопровода 14 и цилиндра 26.
После завершения загрузки раствор клапан 20 закрывается с помощью привода 22, ползун 10 фиксируется на направляющих 1. Рабочий орган 3 путем поворота переориентируется таким образом, чтобы плоский насадок 4, из которого будет осуществляться укладка постели из растворной смеси, расположился вдоль грани последнего уложенного кирпича и опускается вниз с помощью механизма 5 осевой подачи.
Затем осуществляется укладка смеси, для чего давление в полости приводов 31 тех насадков 4, которые будут использоваться для укладки смеси, сбрасывается и под действием пружины 32 клапана 29 поднимаются до упора в диафрагму 28, открывая отверстия насадков 4, каретка 2 освобождается от фиксации и с помощью силового цилиндра 7 перемещается в следующую позицию. При этом рабочая жидкость под действием штока 23 поступает из гидроцилиндра 17 в гидроцилиндр 16 и перемещает поршень 15 вниз, осуществляя синхронное с перемещением каретки 2 выдавливание смеси из полости материалопровода 14 через полый шток 27, цилиндр 26, решетчатую диафрагму 28 и плоский насадок 4 на стену. Насадки 4, не участвующие в укладке смеси, находятся в это время либо в верхнем, либо в нижнем положении и смесь заперта клапаном. Толщина укладываемого слоя определяется диаметром и ходом поршня 15. При укладке кирпича тычковой гранью вдоль стены шаг перемещения каретки в два
раза меньше А и укладка идет из двух насадков 4, однако объем укладываемой массы должен быть тот же. Для этого гидрораспределитель 34 устанавливается в позиции А и гидроцилиндры 17 и 33, работая параллельно, подают в гидроцилиндр 16 тот же объем рабочей жидкости, что и при ходе Б, обеспечивая постянство объема смеси, выдавливаемой поршнем 15.
После завершения укладки постели осуществляется подъемом рабочего органа 3, переключение гидрораспределителя 24 в нейтральное положение Н, возврат каретки 2 в предыдущую позицию и фиксация кирпича на уложенной растворной постели,
осуществляемая опусканием рабочего органа 3 с помощью привода 5 подачи. Затем выполняется завершающая операция по заполнению растворной смесью образовавшихся вертикальных щелей между
кирпичами, в которых в данный момент находятся плоские насадки 4. Для этого клапан 29 с помощью привода 31 и стержня 30 поднимается вверх, воздействует на решетчатую диафрагму 28 и поднимает цилиндр
26 с насадком 4, при этом смесь выдавливается из цилиндра 26 через решетчатую диафрагму 28 и насадок 4 в щель между кирпичами синхронно с извлечением насадка 4. После этого открывается захват 25 и
рабочий орган 3 поднимается вверх. На этом цикл заканчивается.
Холостое перемещение каретки 2 по направляющим 1 может осуществляться с помощью описанного шагового механизма
при нейтральном положении Н гидрораспределителя 24, когда противоположные полости гидроцлиндров 17 и 33 замкнуты либо с помощью самостоятельного привода при освобожденных от фиксации каретке 2 и
ползуне 10.
Шаговое устройство перемещения каретки 2 манипулятора может быть использовано электромеханическим с использованием шаговых или следящих
приводов.
Для сокращения количества вспомогательных перемещений каретки 2 и рабочего органа 3 при выполнении различных схем кладки возможна установка на рабочем органе 3 не трех, как показано на схеме, а четырех или шести плоских насадков 4 (вдоль всех боковых граней кирпича). Установка вдоль ложковой грани кирпича насадков 4, аналогичных насадку 4, расположенному вдоль тычковой грани, диктуется соображениями их унификации.
Принудительная подача поршня 15 и цилиндров 26 в момент загрузки раствора позволяет в результате наличия эффекта всасывания использовать систему подачи раствора с низким давлением, что уменьшает жесткость подводящих растворов шлангов 19 и облегчает работу манипулятора. При работе с подвижными смесями представляется возможность всасывать смесь непосредственно из промежуточного бункера небольшого объема, установленного на каретке или материалопровода, а дозаг- рузку бункера осуществлять в какой-либо фиксированной позиции каретки 2 на направляющих, что позволяет вообще отказаться от связи манипулятора с системой подачи раствора посредством шлангов 19.
Аналогичная система, включающая поршень 15с приводом, состоящим из гидроцилиндра 16 и гидроцилиндров 17 и 33 с золотниками 24 и 34, может быть использована для синхронизации выдачи раствора из насадков 4 при заполнении вертикальных швов кладки за счет вертикального хода вверх всего рабочего органа 3. При этом штоки 23 и 35 цилиндров 17 и 33 должны быть связаны с рабочим органом 3 или непосредственно с приводом 5 их вертикального перемещения. При этом выходе плоских насадков 4 из щелей подача раствора должна быть прекращена, например, за счет перевода золотника 24 в нейтральное положение А.
Формула изобретения
0 подачи раствора, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения синхронизации подачи раствора из насадков с перемещением рабочего органа, он снабжен
5 размещенным в материалопроводе поршнем и приводом его перемещения, выполненным в виде двух гидроцилиндров, соответствующие полости которых сообщены между собой посредством гидрораспре0 делителя, при этом один из гидроцилиндров закреплен на каретке и соединен штоком с механизмом шагового перемещения, а другой гидроцилиндр - на материалопроводе и выполнен с полым штоком, который соеди5 нен с одной стороны с расположенным в материалопроводе поршнем, а с другой стороны - с системой подачи раствора.
2,Манипулятор пол п.1,отличающий с я тем, что привод перемещения
0 поршня снабжен дополнительным гидроцилиндром, установленным параллельно закрепленному на каретке основному гидроцилиндру, и дополнительным гидрораспределителем, соединяющим соответст5 вующие полости этих гидроцилиндров, штоки которых жестко связаны между собой.
NV
п
fc-Г
