М/
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения объемных эффектов | 1988 |
|
SU1608545A1 |
| Способ изготовления профильных кольцевых изделий | 1990 |
|
SU1784384A1 |
| СПОСОБ ЛИКВИДАЦИИ ЗАВИСАНИЙ И НАЛИПАНИЙ ВНУТРИБУНКЕРНОЙ МАССЫ И УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ВНУТРИБУНКЕРНОЙ МАССЫ | 1994 |
|
RU2085454C1 |
| Способ коррекции системы автоматического регулирования толщины полосы | 1991 |
|
SU1759492A1 |
| Бетоноукладчик | 1983 |
|
SU1131658A2 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ СЫПУЧИХ И СМЕРЗШИХСЯ НАВАЛОЧНЫХ ГРУЗОВ С ЖЕЛЕЗНОДОРОЖНЫХ ПЛАТФОРМ | 1992 |
|
RU2026250C1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| Способ вибрационного транспортирования фуражного зерна и других сыпучих материалов | 2016 |
|
RU2617280C1 |
| Устройство для порционного затаривания сыпучих материалов | 1982 |
|
SU1086349A1 |
| ПНЕВМАТИЧЕСКИЙ ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 2009 |
|
RU2429183C2 |


Изобретение относится к устройствам для хранения и выдачи сыпучих и мелкозернистых стройматериалов и может быть использовано в хранилищах бункерного типа. Цель изобретения - повышение надежности привода и снижение энергопотребления. Привод шиберной заслонки 1 бункера содержит винтовой вал 4, соединенный передачей 13 с двигателем, гайку 5, кинематически связанную с валом и закрепленную на заслонке при помощи кронштейнов 6 и упругих элементов 7 и 8, расположенных симметрично относительно кронштейнов. Каждый из упругих элементов состоит из двух пружин разной жесткости, охватывающих одна другую и имеющих разную высоту: высота охватывающей пружины меньшей жесткости больше высоты охватываемой пружины большей жесткости. 1 з.п. ф-лы, 6 ил.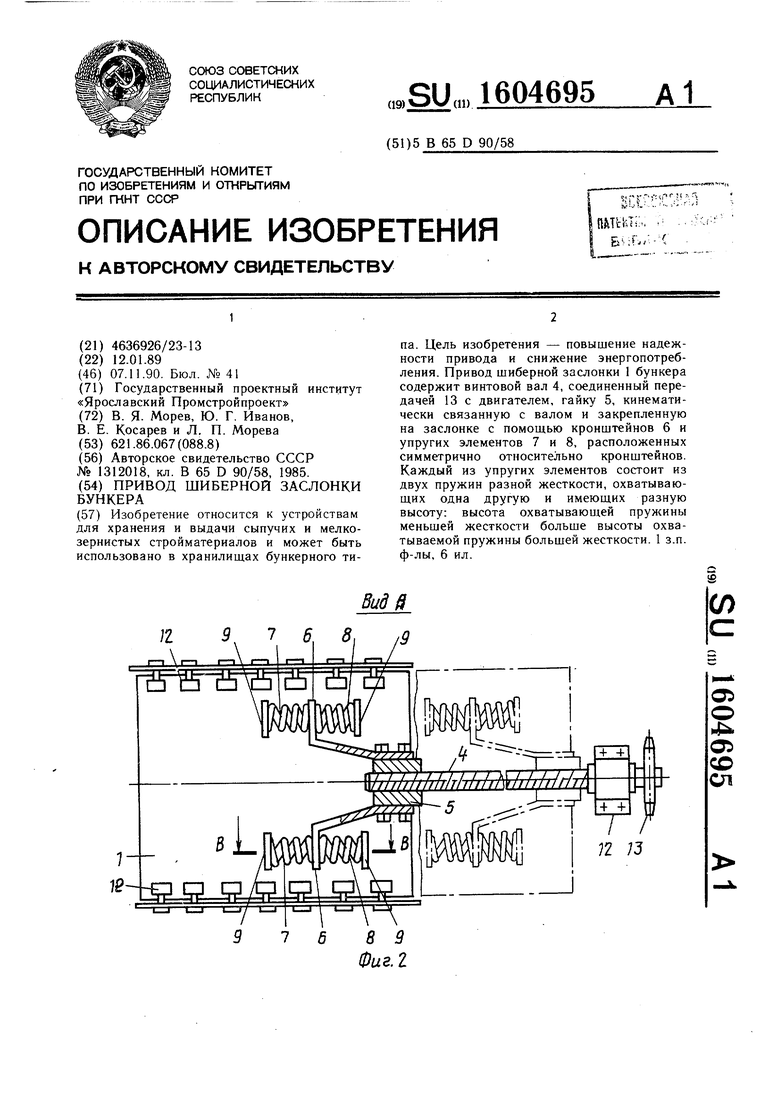
;z
76 89 Фиг. г
О5
о
NJ
О5
со
СП
Изобретение относится к устройствам для хранения и выдачи сыпучих и мелкозернистых стройматериалов и может быть реализовано в хранилищах бункерного типа.
Заслонка 1 установлена с возможностью продольного перемещения по направляющим на роликоопорах 14.
Привод щиберной заслонки бункера раЦель изобретения - повыщение надеж- ботает следующим образом ности привода и снижение энергопотреб-В момент пуска двигателя 3 привода
ления.
Расположение симметрично относительно кронщтейнов привода упругих элементов, состоящих из двух пружин разной жесткости, охватывающих одна, другую и имеющих высоту (высота пружины меньщей жесткости больще высоты пружины больщей жесткости), позволяет плавно регулировать нагрузку на двигатель при открывании и закрывании заслонки.
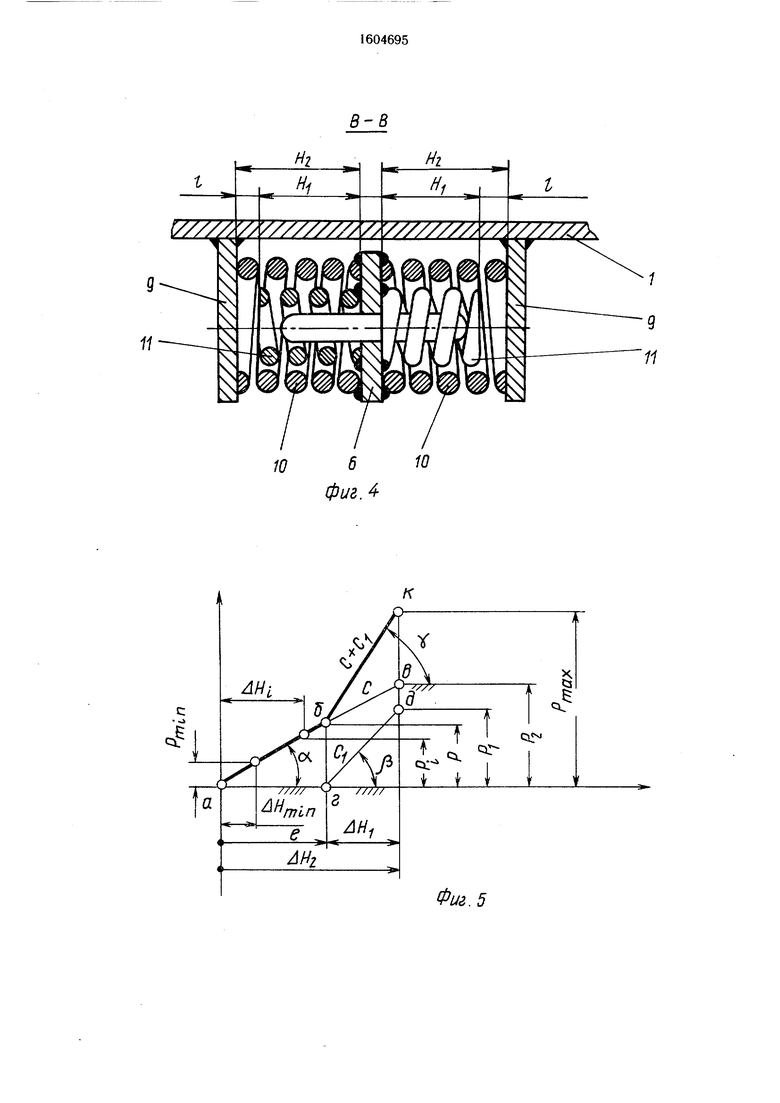
На фиг. 1 изображен привод шиберной заслонки бункера, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - графическая интерпретация
10
15
щиберной заслонки 1 бункера 2 на открывание (неа-ационарный - неустановивщий- ся режим работы) преобладают значительные силы Р цо трения - сцепления (фиг. 6), т. е. сопротивления выводу заслонки из неподвижного состояния (покоя) в перемещение (ход), действующие по площади контакта со столбом сыпучего материала в бункере.
Ротор двигателя 3 начинает вращаться, поворачивая через передачу 13, расположенный в опоре 12 винтовой вал 4, что приводит к перемещению вправо вдоль винтового вала кинематически связанной с ним гайки 5, демпфирующей (сжимающей)
J-J ДMJ1 1 , J 1 L/СЛ (Af Г1 T.V. rill.l J iiJ -i -« -4-- - жж. .i-i ...--,.,-,-j- j-,.V
силовой характеристики комбинированного20 кронщтейнами 6 крайнюю правую симмет- упругого элемента переменной жесткости;рично расположенную группу упругих эле- на фиг. 6 - графики изменения внещ-ментов 8, базирующихся на упорах 9 не- ней нагрузки на двигатель привода (пунк-- подвижной зафиксированной указан 1ыми си- тирная линия) по мере набора скоростилами сопротивления Р и льшиберной заслон- ротора в момент пуска и сил сопротив- ки 1 (левая группа симметрично распо- ления при перемещении заслонки (сплощ-ложенных упругих элементов 7 в этот ная линия).момент, естественно, не работает -- не под- Привод щиберной заслонки 1 бункера 2 содержит двигатель 3, связанный с винтовым валом 4, кинематически соединенным с
вергается деформации сжатия). При этом в каждом из комбинироанных упругих элементов 8 сначала начинает деформироватьгайкой 5, смонтированной на заслонке с зо ся (сжиматься) наружная охватывающая
помощью кронштейнов 6 с упругими комбинированными элементами 7 и 8 переменной жесткости, закрепленными на заслонке с помощью упоров 9. Упругие элементы 7 и 8 расположены симметрично относительпружина 10 меньщей жесткости С с более пологой (угол а фиг. 5) силовой характеристикой (прямая абв).
По мере ее деформации АН изменяется, увеличиваясь, и усилие Р сопротивлено кронщтейнов и каждый из них состоит35 ния и, как только деформация достигает
из двух пружин 10 и 11 разной жесткое-значения е, соответствующего усилию Р
ти С и С|, охватывающих одна другуюсопротивления, зазор между упором 9 заслон- и имеющих разную высоту: высота Н2 пружины 10 меньшей жесткости, которая может быть выполнена охватывающей, больще высоты HI пружины И больщей жесткости, которая может быть выполнена охватываемой, на величину 1, являющуюся гарантированным зазором между нарух - ным торцом пружины 11 и плоскостью упора 9, причем
40
ки 1 и наружным периферийным торцом более жесткой охватывающей пружины 11 достигает нулевого значения, последняя включается в работу (фиг. 5). С этого момента (точка г, фиг. 5) обе пружины работают на сжатие совместно, что приводит к резкому изменению (в точке б) силовой характеристики комбинироанного элемен45 та 8, имеющей более крутой (под углом Y) наклон и проявляется в суммировании усилий обеих пружин, работающих как единая упругая система с жесткостью Как только при некоторой величине деформации AH2 l+AHi каждого из упру.Р С
где Р
максимальное усилие .открывания заслонки в момент ее перемещения; С- жесткость пружины 10. Прямолинейная (фиг. 5) силовая характеристика абв пружины 10 жесткостью С имеет более пологий угол а наклона, чем прямолинейная силовая характеристика гд более жесткой пружины 10 жесткостью
45 та 8, имеющей более крутой (под углом Y) наклон и проявляется в суммировании усилий обеих пружин, работающих как единая упругая система с жесткостью Как только при некоторой величине деформации AH2 l+AHi каждого из упру50 гих элементов 8 суммарное усилие Pi+Ps соответствующих им пружин 10 и 11 достигает значения P auuit равного (или несколько больше) указанной величины сил трения-сцепления сыпучего материала с заслонкой 1, последняя придет в движение.
.. 1 rWCl11 I-/ J fl iit. iii-fi.ivJ i..-1...- ,,j
Ci () с более крутым углом p наклона.55 перемещаясь по роликоопорам вправо - на
Вал 4 установлен в подшипниковойоткрывание бункера 2.
опоре 12 и связан с двигателем 3 черезТаким образом, за счет возможности
передачу 13деформа1Хии ЛН группы упругих элементов 8
Заслонка 1 установлена с возможностью продольного перемещения по направляющим на роликоопорах 14.
Привод щиберной заслонки бункера ра ботает следующим образом В момент пуска двигателя 3 привода
ботает следующим образом В момент пуска двигателя 3 привода
щиберной заслонки 1 бункера 2 на открывание (неа-ационарный - неустановивщий- ся режим работы) преобладают значительные силы Р цо трения - сцепления (фиг. 6), т. е. сопротивления выводу заслонки из неподвижного состояния (покоя) в перемещение (ход), действующие по площади контакта со столбом сыпучего материала в бункере.
Ротор двигателя 3 начинает вращаться, поворачивая через передачу 13, расположенный в опоре 12 винтовой вал 4, что приводит к перемещению вправо вдоль винтового вала кинематически связанной с ним гайки 5, демпфирующей (сжимающей)
жж. .i-i ...--,.,-,-j- j-,.V
кронщтейнами 6 крайнюю правую симмет- рично расположенную группу упругих эле- ментов 8, базирующихся на упорах 9 не- подвижной зафиксированной указан 1ыми си- лами сопротивления Р и льшиберной заслон- ки 1 (левая группа симметрично распо- ложенных упругих элементов 7 в этот момент, естественно, не работает -- не под-
кронщтейнами 6 крайнюю правую симмет- рично расположенную группу упругих эле- ментов 8, базирующихся на упорах 9 не- подвижной зафиксированной указан 1ыми си- лами сопротивления Р и льшиберной заслон- ки 1 (левая группа симметрично распо- ложенных упругих элементов 7 в этот момент, естественно, не работает -- не под-
вергается деформации сжатия). При этом в каждом из комбинироанных упругих элементов 8 сначала начинает деформироваться (сжиматься) наружная охватывающая
ся (сжиматься) наружная охватывающая
пружина 10 меньщей жесткости С с более пологой (угол а фиг. 5) силовой характеристикой (прямая абв).
По мере ее деформации АН изменяется, увеличиваясь, и усилие Р сопротивления и, как только деформация достигает
сопротивления, зазор между упором 9 заслон-
0
ки 1 и наружным периферийным торцом более жесткой охватывающей пружины 11 достигает нулевого значения, последняя включается в работу (фиг. 5). С этого момента (точка г, фиг. 5) обе пружины работают на сжатие совместно, что приводит к резкому изменению (в точке б) силовой характеристики комбинироанного элемен5 та 8, имеющей более крутой (под углом Y) наклон и проявляется в суммировании усилий обеих пружин, работающих как единая упругая система с жесткостью Как только при некоторой величине деформации AH2 l+AHi каждого из упру0 гих элементов 8 суммарное усилие Pi+Ps соответствующих им пружин 10 и 11 достигает значения P auuit равного (или несколько больше) указанной величины сил трения-сцепления сыпучего материала с заслонкой 1, последняя придет в движение.
-1...- ,,j
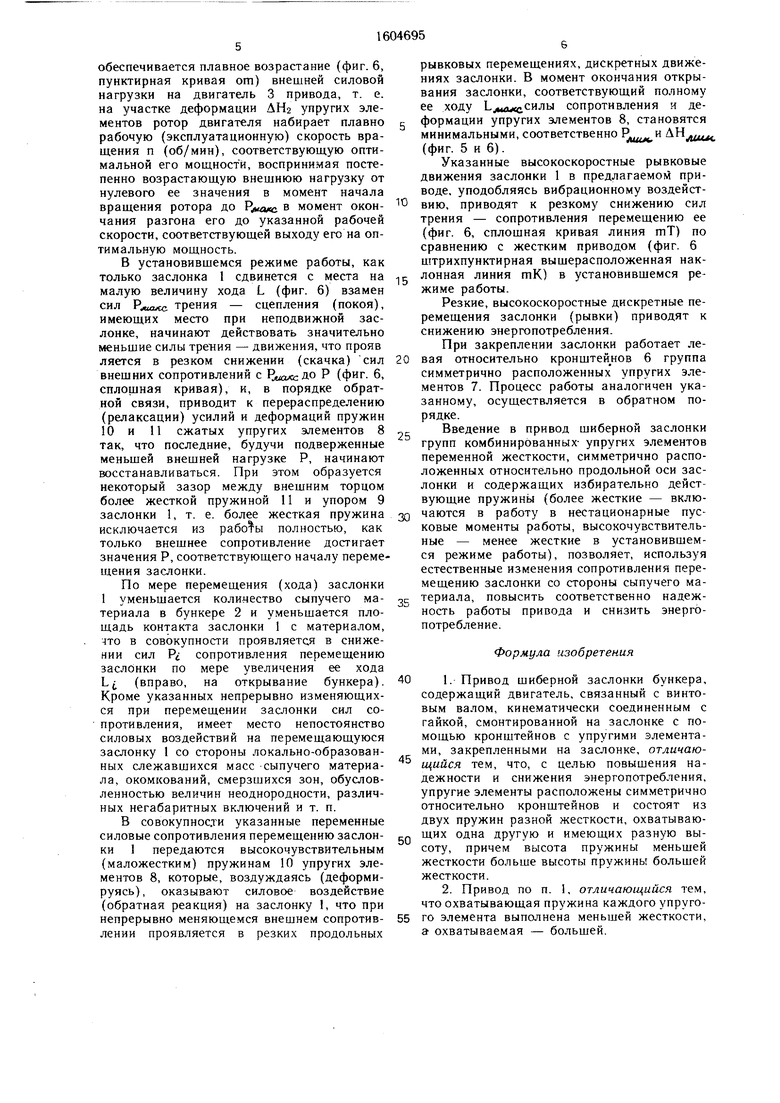
обеспечивается плавное возрастание (фиг. 6, пунктирная кривая от) внешней силовой нагрузки на двигатель 3 привода, т. е. на участке деформации ДН2 упругих элементов ротор двигателя набирает плавно рабочую (эксплуатационную) скорость вращения п (об/мин), соответствующую оптимальной его мощности, воспринимая постепенно возрастающую внещиюю нагрузку от нулевого ее значения в момент начала вращения ротора до H«a«j в момент окончания разгона его до указанной рабочей скорости, соответствующей выходу его на оптимальную мощность.
В установивщемся режиме работы, как только заслонка 1 сдвинется с места на малую величину хода L (фиг. 6) взамен сил РЛОЛС трения - сцепления (покоя), имеющих место при неподвижной заслонке, начинают действовать значительно меньщие силы трения - движения, что прояв ляется в резком снижении (скачка) сил внещних сопротивлений с РмаксЛ.о Р (фиг. 6, сплощная кривая), к, в порядке обратной связи, приводит к перераспределению (релаксации) усилий и деформаций пружин 10 и 11 сжатых упругих элементов 8 так, что последние, будучи подверженные меньшей внешней нагрузке Р, начинают восстанавливаться. При этом образуется некоторый зазор между внешним торцом более жесткой пружиной 11 и упором 9 заслонки 1, т. е. более жесткая пружина исключается из работы полностью, как только внешнее сопротивление достигает значения Р, соответствующего началу перемещения заслонки.
По мере перемещения (хода) заслонки 1 уменьшается количество сыпучего материала в бункере 2 и уменьшается площадь контакта заслонки 1 с материалом, что в совокупности проявляется в снижении сил сопротивления перемещению заслонки по мере увеличения ее хода L (вправо, на открывание бункера). Кроме указанных непрерывно изменяющихся при перемещении заслонки сил сопротивления, имеет место непостоянство силовых воздействий на перемещающуюся заслонку 1 со стороны локально-образованных слежавшихся масс сыпучего материала, окомкований, смерзшихся зон, обусловленностью величин неоднородности, различных негабаритных включений и т. п.
В совокупности указанные переменные силовые сопротивления перемещению заслонки 1 передаются высокочувствительным (маложестким) пружинам 10 упругих элементов 8, которые, воздуждаясь (деформируясь) , оказывают силовое воздействие (обратная реакция) на заслонку 1, что при непрерывно меняющемся внешнем сопротивлении проявляется в резких продольных
5
0
5
0
0
5
0
5
рывковых перемещениях, дискретных движениях заслонки. В момент окончания открывания заслонки, соответствующий полному ее ходу Ь ийы сСилы сопротивления и деформации упругих элементов 8, становятся минимальными, соответственно ц,и АН (фиг. 5 и 6).
Указанные высокоскоростные рывковые движения заслонки 1 в предлагаемом приводе, уподобляясь вибрационному воздействию, приводят к резкому снижению сил трения - сопротивления перемещению ее (фиг. 6, сплощная кривая линия тТ) по сравнению с жестким приводом (фиг. 6 штрихпунктирная выщерасположенная наклонная линия тК) в установивщемся режиме работы.
Резкие, высокоскоростные дискретные перемещения заслонки (рывки) приводят к снижению энергопотребления.
При закреплении заслонки работает левая относительно кронщтей нов 6 группа симметрично расположенных упругих элементов 7. Процесс работы аналогичен указанному, осуществляется в обратном порядке.
Введение в привод шиберной заслонки групп комбинированных- упругих элементов переменной жесткости, симметрично расположенных относительно продольной оси заслонки и содержащих избирательно действующие пружинь (более жесткие - включаются в работу в нестационарные пусковые моменты работы, высокочувствительные - менее жесткие в установившемся режиме работы), позволяет, используя естественные изменения сопротивления перемещению заслонки со стороны сыпучего материала, повысить соответственно надежность работы привода и снизить энергопотребление.
Формула изобретения
ШигЛ
Фиг.З
456 9 1
/2
/ ГЯ /./. /. /./././1P
/////// / ///y II
l I- . J
;j
S
,V4
10
Фиг. 5
(Щ)
Фиг. б
-- К
| Бункерный затвор | 1985 |
|
SU1312018A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
